机器人运动学
参数:
如图1所示,D-H法参数共有4个:
a:从Zi-1到Zi的距离,即两旋转轴公共法线的距离,
α:从Zi-1到Zi的角度,即垂直于a所在平面内两旋转轴的夹角
d:从Xi-1到Xi的距离,即两连杆间的距离
θ:从Xi-1到Xi的角度,即两连杆公垂线的夹角
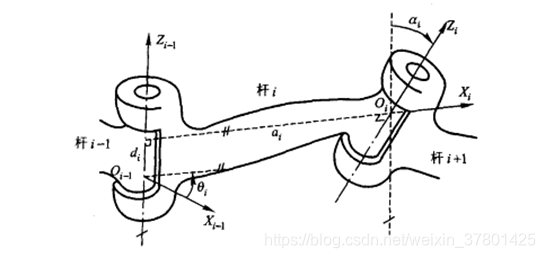
图1 机械臂连杆图
确定坐标系步骤
1 找出各关节轴,并画出这些轴线的延长线。
2 找z轴。与轴线重合
3 找原点。若两轴相交,则交点为原点;若两轴相离,则公垂线与轴的交点为原点;若两轴平行,则选择原点使对下一连杆的距离d为0。
4 找x轴。(该轴与下一个轴)若两轴相交,则x轴方向与两轴的叉积方向相同,从轴i-1指向轴i;若两轴相离或平行,则x轴方向为两轴的公垂线。
5 转换矩阵:alpha, a, theta, d
DH法
如图1所示
步骤:
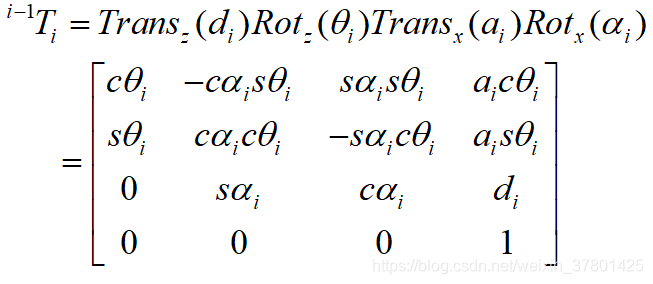
step1:沿Zi-1轴移动di;
step2:绕Zi-1轴转动θi;
step3:沿Xi轴移动ai;
step4:绕Xi轴转动αi。
齐次变换矩阵公式如下:
MDH法
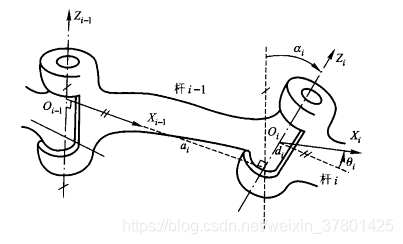
图2 MDH法坐标系图
如图2所示,具体步骤如下:
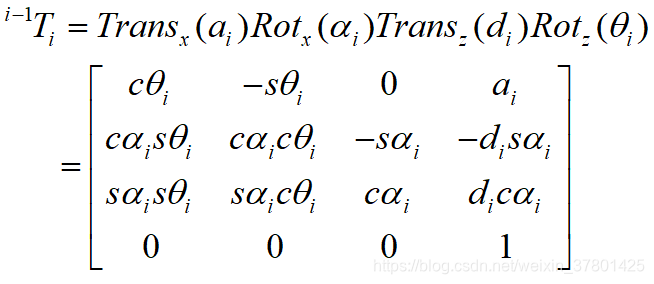
step1:沿Xi轴移动ai;
step2:绕Xi轴转动αi。
step3:沿Zi-1轴移动di;
step4:绕Zi-1轴转动θi;
齐次变换矩阵公式如下:
DH法与MDH法的区别
首先需要区分驱动轴坐标系以及传动轴坐标系,如图2所示。连杆i的近端是关节i,远端为关节i+1,驱动连杆i的力是通过驱动关节i,进而施加给连杆i,因此关节i是驱动轴。而连杆i的运动通过关节i+1传递给连杆i+1,因此关节i+1是传动轴。
DH法建立连杆i的坐标系时,其Zi方向与关节i的轴向重合,即连杆i的坐标系与其传动轴坐标系重合,而MDH法中,连杆i的坐标系与其驱动轴坐标系重合。因此DH法的参数{ai,αi,di,θi}与MDH法中的{ai+1,αi+1,di,θi}等同
