0. 经典:PUMA560
相信你已经不是第一次见过这家伙:
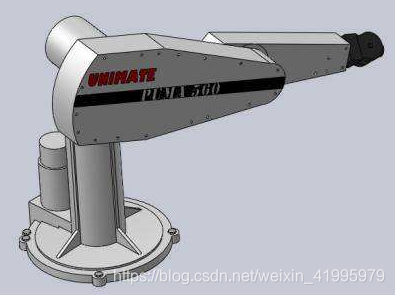
没办法,它实在是太经典了,导致了机器人学的一系列教材都使用PUMA560作为教具来讲解。
PUMA560拥有6个自由度,负载2kg,采用了直流伺服来驱动关节,是机器人历史上最经典的工业机器人之一。
0.0 确立坐标系以及连杆参数
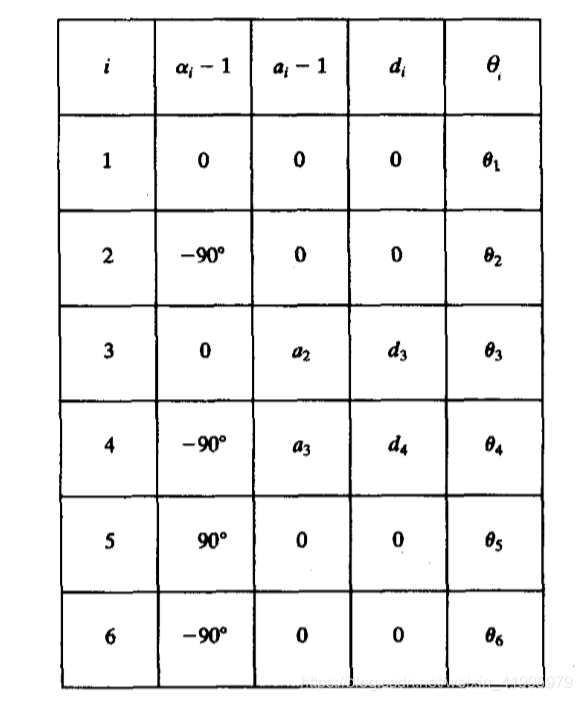
为了研究机器人的运动学,我们首先需要考察机器人的结构,并且为其每个连杆建立连杆坐标系,根据所建的坐标系确定各个连杆参数,也就是常说的D-H参数。
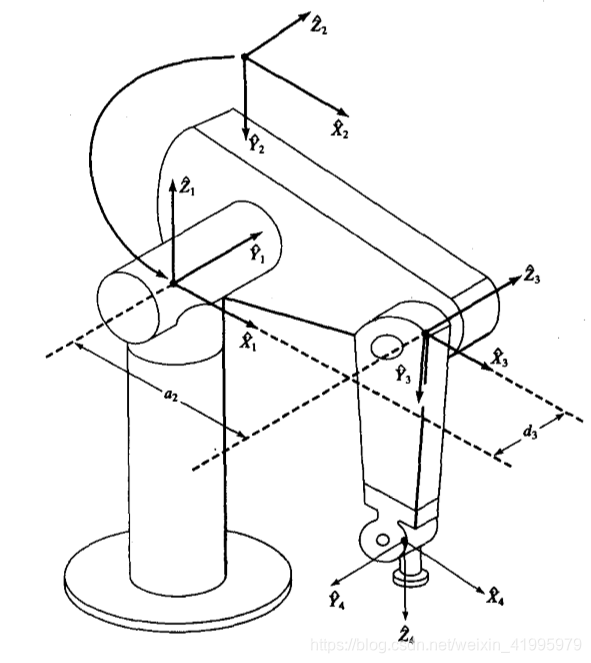
上图是《机器人学导论》书中的建系方法,你可能会在别的地方见过很多不同的建系方法,因为坐标系的确定结果不唯一,那么D-H参数表也是不唯一的。根据我们之前学过的关于连杆坐标系和连杆参数的知识,我们可以写出下面这个D-H参数表
这里有一点要注意一下,由于在图中我们很难清楚地看见6个自由度,那是由于腕部的结构难以在图上表示出来,其实腕部的结构是像下面这样的:
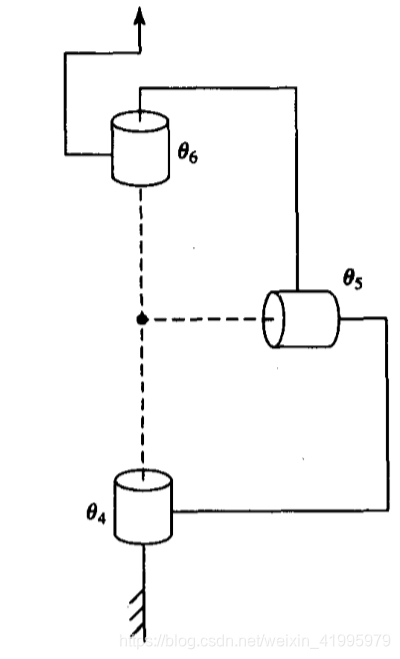
如果你看到这很懵逼,没关系我一开始看的时候也是这样,多看几次就会懂了。。。。
0.1 求出各个变换矩阵
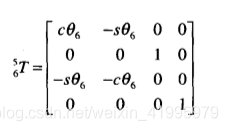
当我们得到了D-H参数表以后,求出各个相邻连杆之间的变换矩阵就变得很容易了,因为我们在这里就可以使用之前求出来过的公式了:
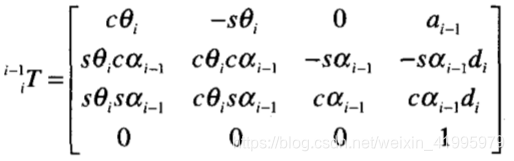
我们求出来的结果是:
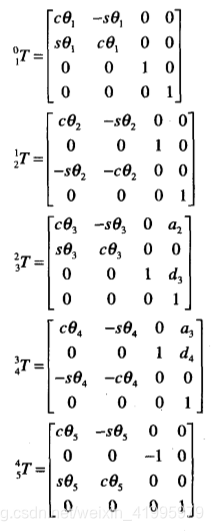
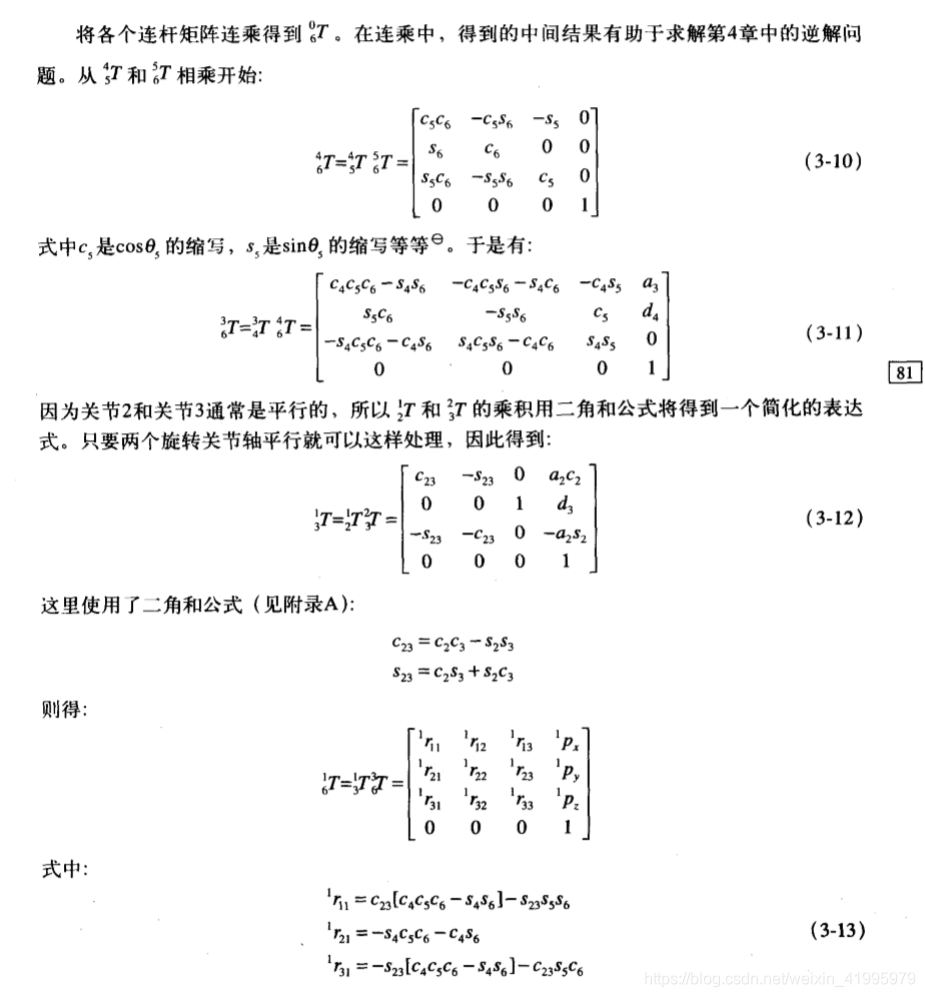
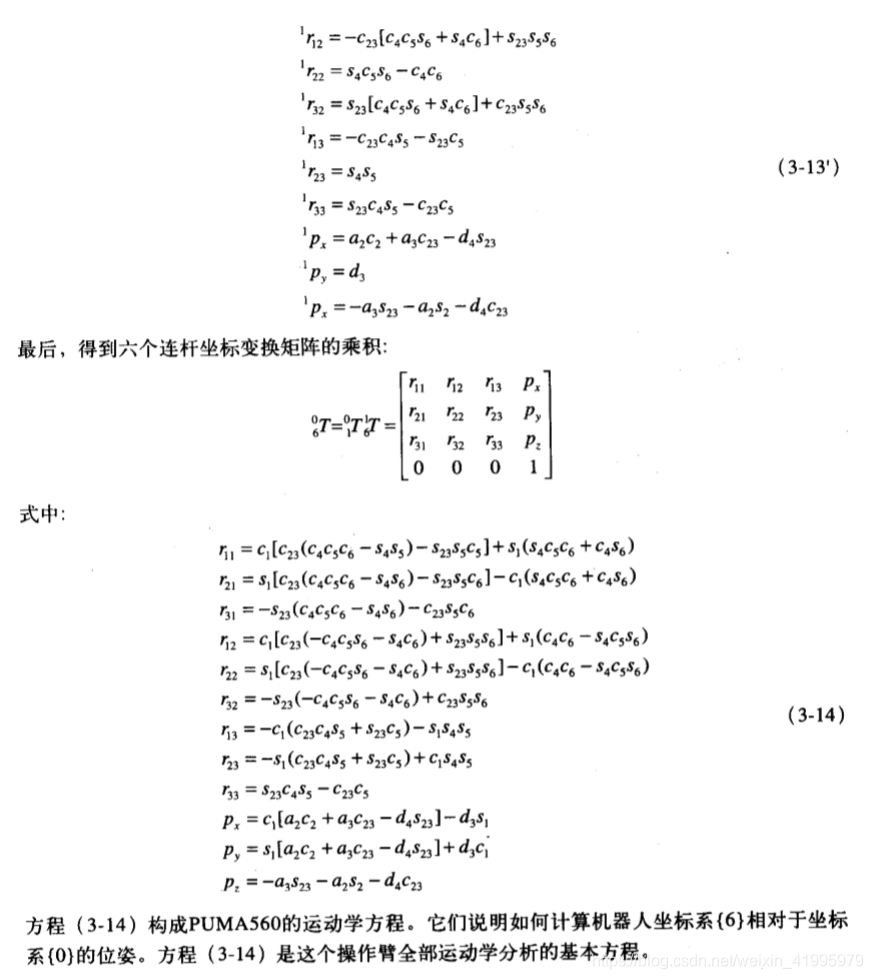
0.2 各个矩阵连乘