目录
引言:机器人的运动学
运动学单纯研究机械臂的运动特性(位置、速度、加速度以及位置变量的所有高阶导数(对时间或者其他变量)),不考虑使机械臂产生运动时施加的力。
首先与研究静止时机械臂的位置和姿态。
如何去描述机器复杂的几何形状呢?方法是分别在操作臂的每个连杆上分别设置一个连杆坐标系,然后再描述这些连杆坐标系之间的关系
什么是连杆,如何表示连杆
什么是连杆?
类比人手的大臂和小臂,机器人操作臂也可以看成是由一系列由关节连接成的刚体,称作连杆
关节可被分为转动关节和移动关节,这里主要讨论常用的转动关节。
一般来说,机械臂有几个关节,这个机械臂就有几个自由度。
个自由度的关节构成机械臂机构,就可以看做用 个单自由度的关节把 个
一般从基座开始对连杆进行编号,称固定基座为连杆0,第第一个可动连杆为连杆1,以此类推……
如何表示连杆?
计算这两个参数需要用到两个轴,一个连杆。
把连杆看做刚体,如何描述两个轴之间的连杆的运动呢?
两岸运动的描述需要用到两个参数:连杆长度(
)和连杆扭转角(
),如图:

连杆长度(
):将两个轴延长,其公垂线总是存在的,而且是一个固定值。
关节轴
和关节轴
之间的公垂线长度记作
,即为连杆长度
连杆扭转角(
):将关节轴
和关节轴
的某一个轴沿着公垂线平移,使其相交,构成一个平面,在平面内使用右手定则从轴
绕
转向
的夹角,记作
,即为连杆扭转角
可以用这两个参数来定义空间中任意两条直线(关节轴)的关系
怎样连接连杆
计算这两个参数需要两个连杆,一个公共轴
在运动学分析中,将两个连杆连接在一起,不需要考虑特别复杂的因素,同样只需要掌握两个参数:连杆偏距( )和关节角( ),这两个参数完全确定了两个连杆之间是如何连接的。考虑两种情况的连杆,对这两个参数进行定义。
对于处于运动链中间的连杆
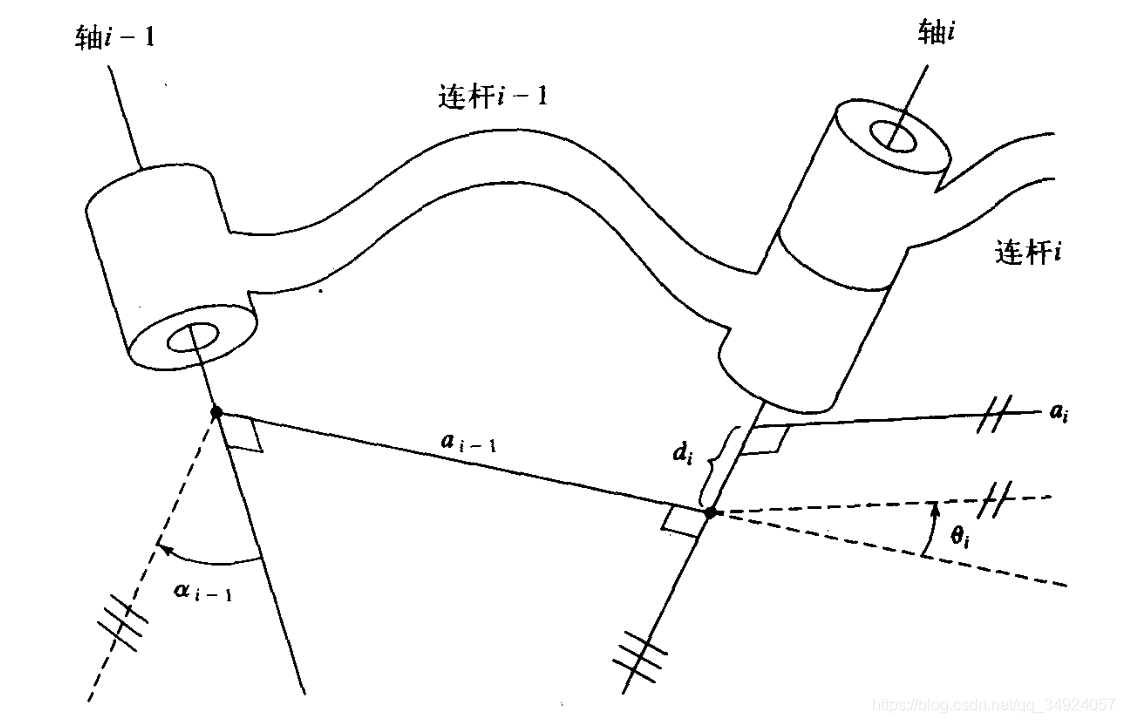
连杆偏距(
): 两个连杆连接在一起,有三个关节、两个公垂线,两个公垂线沿着两个连杆公共轴线方向的距离可以用连杆偏距描述。
如上图所示的互相连接的连杆
和
使用
表示连接连杆
的两端关节轴的公垂线长度,
表示连接连杆
的两端关节轴的公垂线长度;从公垂线
与关节轴
的交点到公垂线
与关节轴
的交点之间的有向距离即为两相邻连杆偏距
关节角(
): 描述两相邻连杆绕公共轴线旋转的夹角,是一个变量。
平移使两公轴线相交,公轴线旋转的角度就是关节角
当关节是转动关节时,连杆偏距是常量,关节角是变量,若是移动关节,则与之相反。
对于处于运动链两端的连杆
处于运动链两端的连杆,他们的参数习惯设定为0,也就是说,假设对于一个具有转动关节的机械臂, 、 、 都为 , 的值任选,实际上其实不需要定义 和 ,在后面的DH参数表中会体现到。
连杆参数和连杆坐标系
连杆参数
至此我们知道,每个连杆都可以用四个运动学参数来表示,两个参数描述连杆本身,另外两个参数描述连杆之间的连接关系。
对于转动关节,有三个连杆参数是不变的,
是关节变量。我们可以使用这些参数来描述机构的运动关系,这种规则称为DH方法
连杆坐标系
为了描述相邻两连杆之间的相对位置关系,需要在每个连杆上定义一个固连坐标系
建立连杆坐标系的步骤
- 找出各个关节轴,并标出这些轴线的延长线
- 找出关节轴 和 之间的公垂线或关节轴 和 的交点,以关节轴 和 的交点或公垂线与关节轴 的交点作为连杆坐标系 的原点
- 规定 轴沿关节轴 的指向
- 规定 轴沿公垂线的指向,如果关节轴 和 相交,则规定 轴垂直于关节轴 和 所在的平面
- 按照右手定则确定 轴
- 当第一个关节变量为0时,定坐标系 和 重合;对于最后一个坐标系 ,其原点和 的方向可以任选,但是尽量使连杆的参数为 。
连杆参数在连杆坐标系的表示方法
- = 沿 轴,从 移动到 的距离
- = 绕 轴,从 旋转到 的角度
- = 沿 轴,从 移动到 的距离
- = 绕 轴,从 旋转到 的角度
对应的是距离,所以通常设为正,其他的可以为正,也可以为负
参考:
John J. Craig《机器人学习导论》