论文作者:Daniel J. Blackman, John V. Nicholson, Camilo Ordonez, Bruce D.Miller, and Jonathan E. Clark
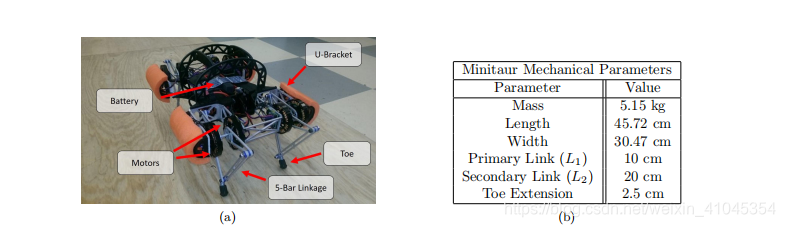
一、结构参数
二、腿部运动空间
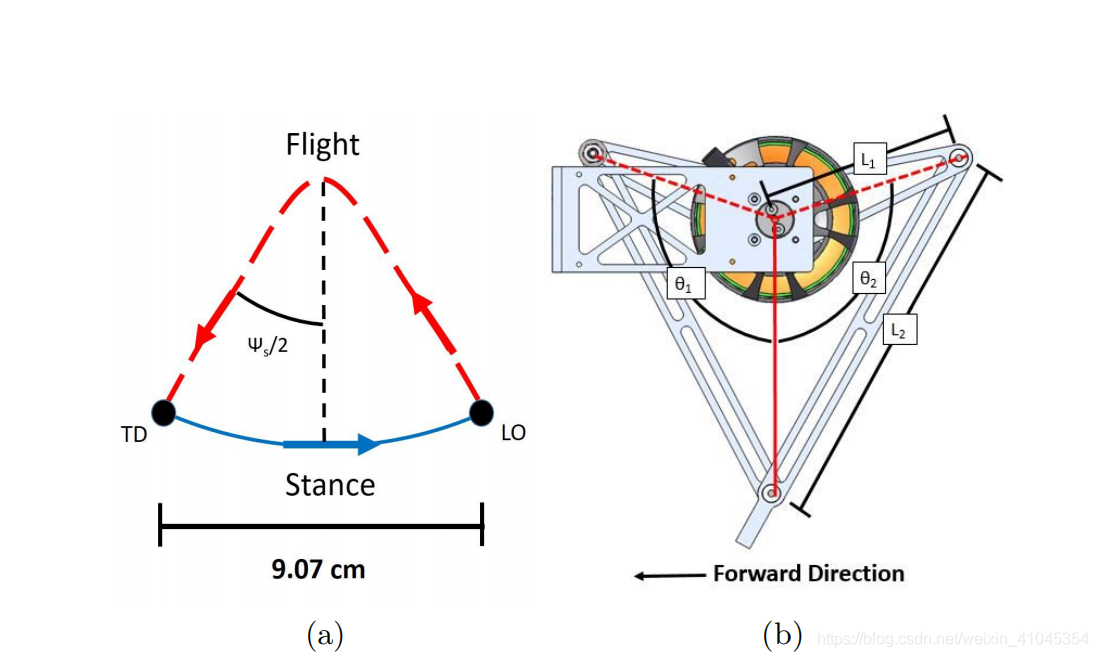
上图展示了minitaur的一条腿的整个运动周期,从摆动相到支撑相。
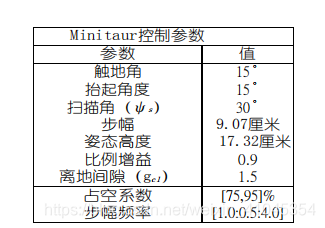
ψs为支撑相扫过的角度,论文中详细的参数如下:
下面来介绍腿部运动学模型:
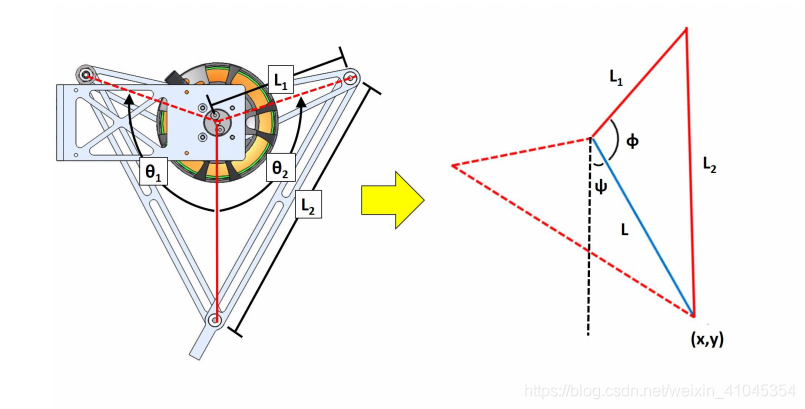
这里构造一个虚拟的腿L,对于给定腿部末端位置[x, y],有以下数量关系:
腿长:
L=x2+y2
摆角:
ψ=arcsin(Lx)
伸展角度:
ϕ=arccos(2L1LL2+L12−L22)
根据以上关系,我们可以求出电机所需要的控制角度为
θ1=ϕ−ψ
θ2=ϕ+ψ
需要注意的是,在之前构建的仿真环境中,我们直接用三角函数来生成摆角信号和伸展角,即:
ψ=0.3sin(2πft+φ)
ϕ=0.35cos(2πft+φ)
其中,
f为频率,用于控制信号周期,
φ为相位
