版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/DanielDingshengli/article/details/84325334
预备知识
1.传统的控制方法只有通过位置逆解把空间位姿转换为关节变量,才能实现对机器人末端的控制。
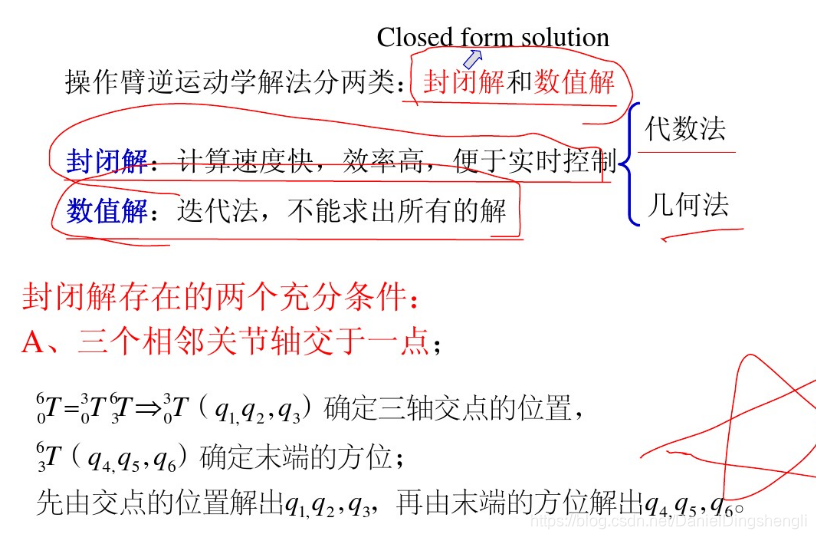
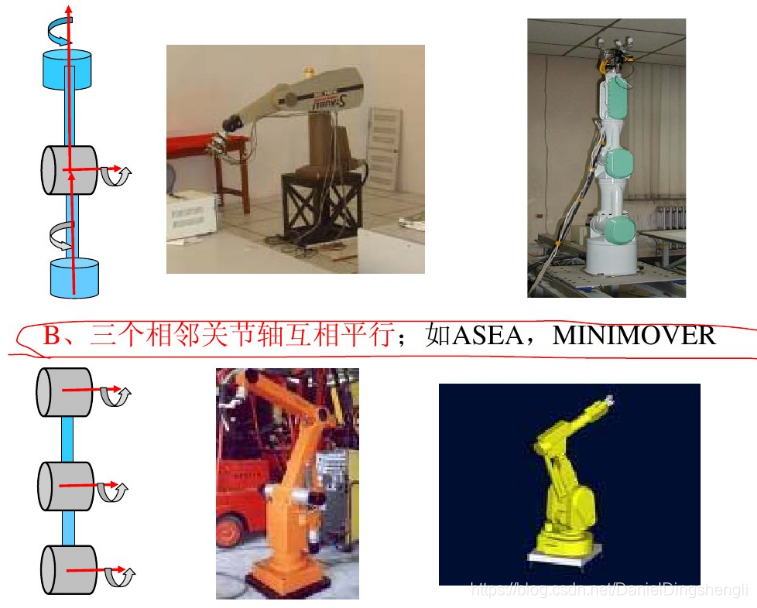
2.最后三个关节的轴线满足Piper准则(轴线相交),逆解有封闭解且运算比较简单;对于不满足Piper准则且6个关节又都是转动副,则逆解运算较为困难。
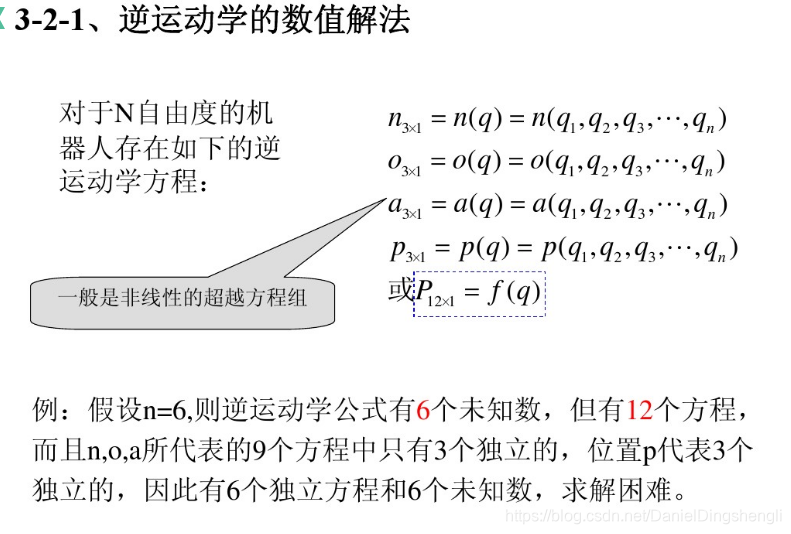
3.解析解就是给出解的具体函数形式,从解的表达式中就可以算出任何对应值;数值解就是用数值方法求出近似解,给出一系列对应的自变量和解。
正运动学
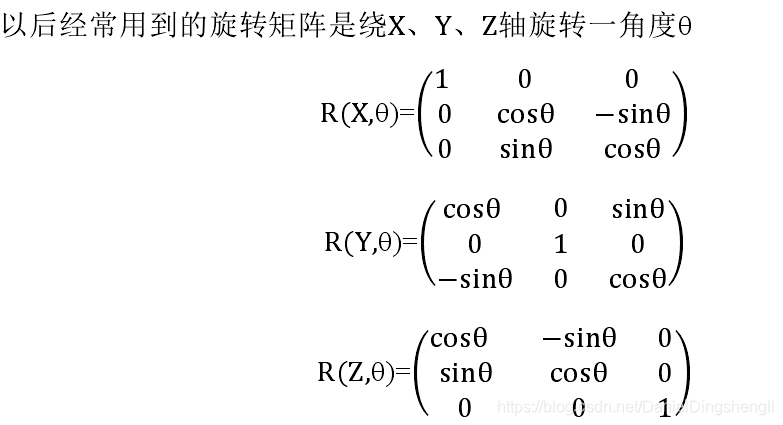
旋转矩阵
列矢量相互正交
齐次坐标

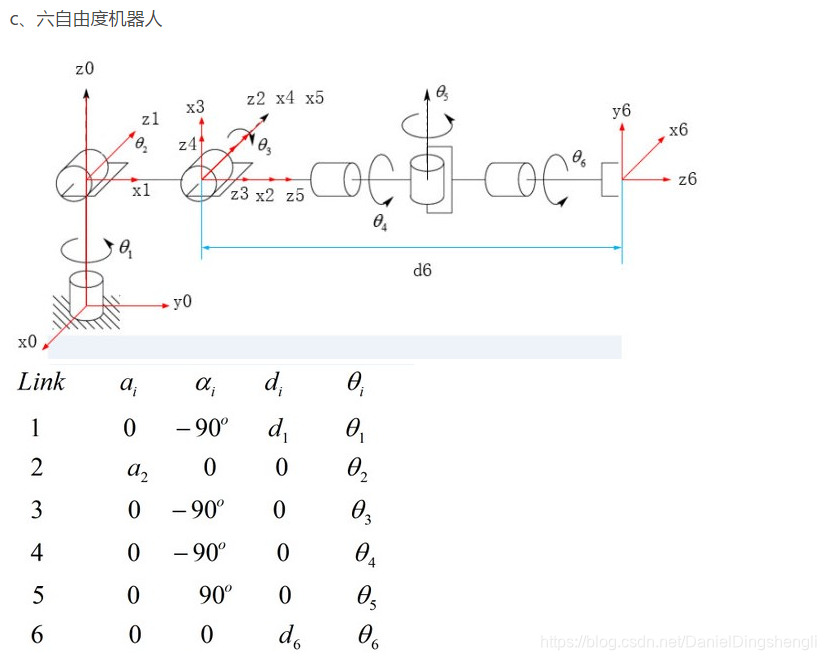
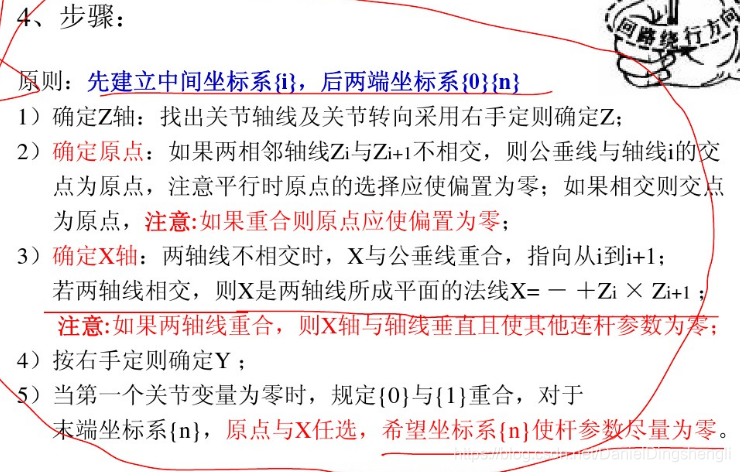
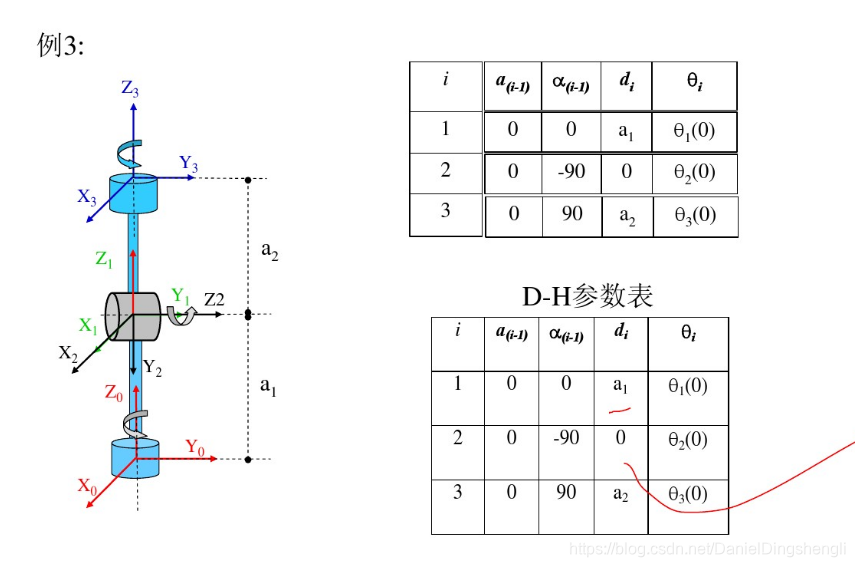
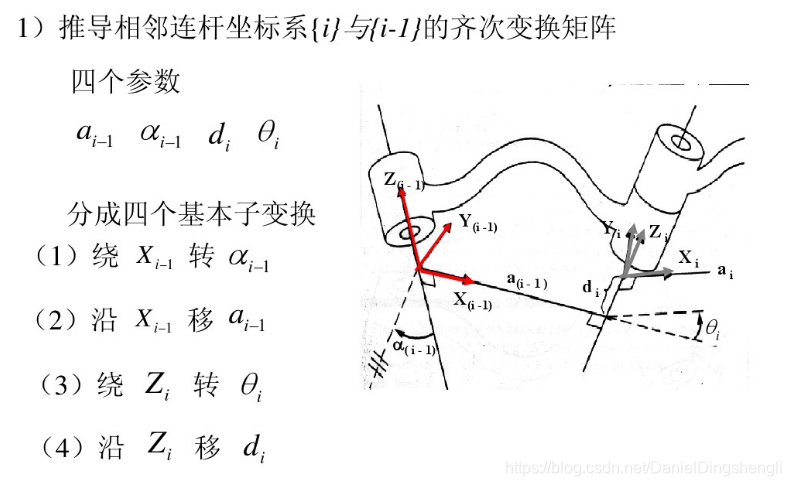
DH建模
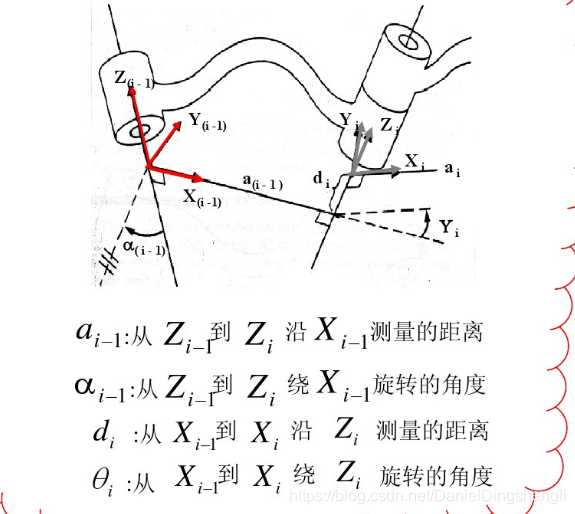
α,a,d,θ
公垂线长度
关节轴线夹角
连杆偏置
公法线夹角
运动学正解:

https://wenku.baidu.com/view/03d586024afe04a1b171de8d.html

注意:B中的坐标在A中表示,变换理解为A坐标系到B坐标系怎么走
逆运动学
逆解问题就是在根据连杆参数di, ai和αi以及给定末端位姿Tend,求解关节变量θi
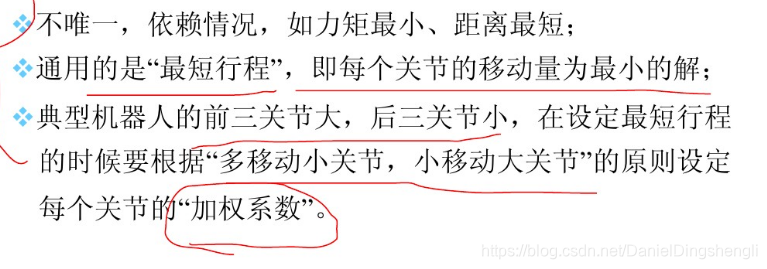
最优解的准则
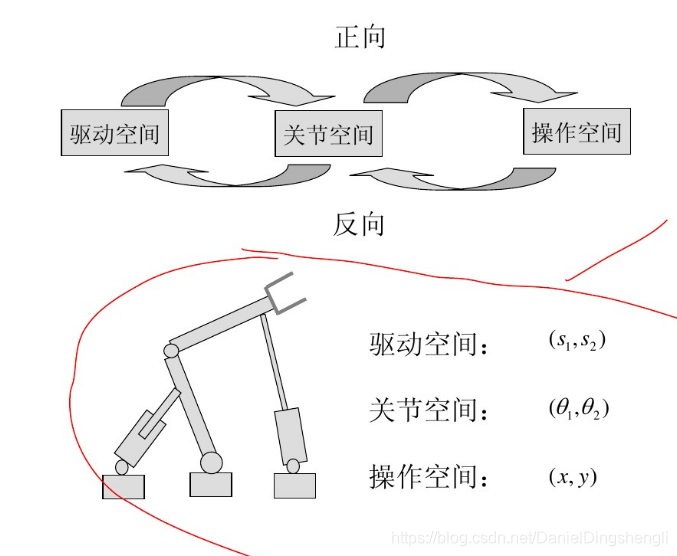
我们一直假设每个运动关节都是由某种驱动器直接驱动的,然而对于许多机器人来说并非如此,比如利用两个驱动器以差分驱动方式来驱动一个关节,或者使用四连杆机构来驱动关节,这时就需要考虑驱动器的细节,由于测量操作臂的传感器常常安装在驱动器上,因此当我们在使用驱动器时就需要把关节矢量转换到驱动器矢量,驱动器矢量组成的空间就称为驱动空间。
雅可比矩阵
机器人关节空间的微小变化与机器人末端坐标系的微小变化之间的关系,称为机器人的微分运动,主要用于机器人末端在笛卡尔空间的速度控制。

扫描二维码关注公众号,回复:
4983263 查看本文章

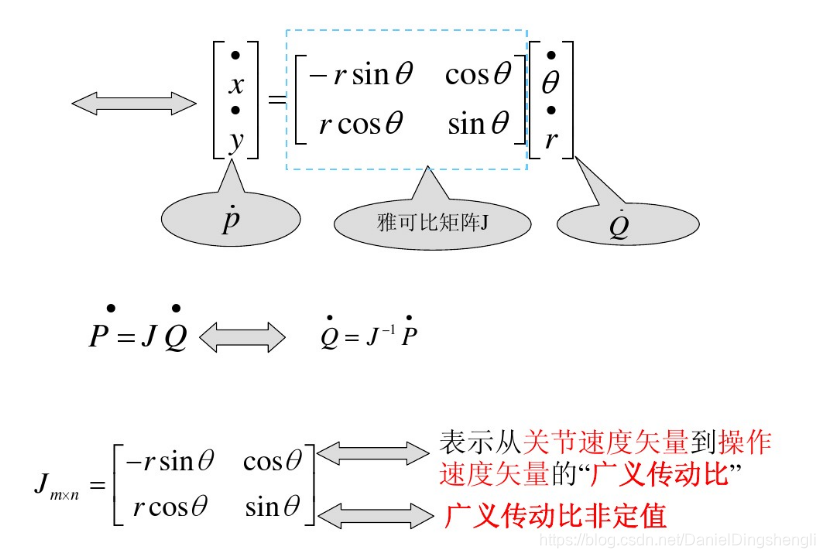 关节速度矢量—>操作速度矢量
关节速度矢量—>操作速度矢量
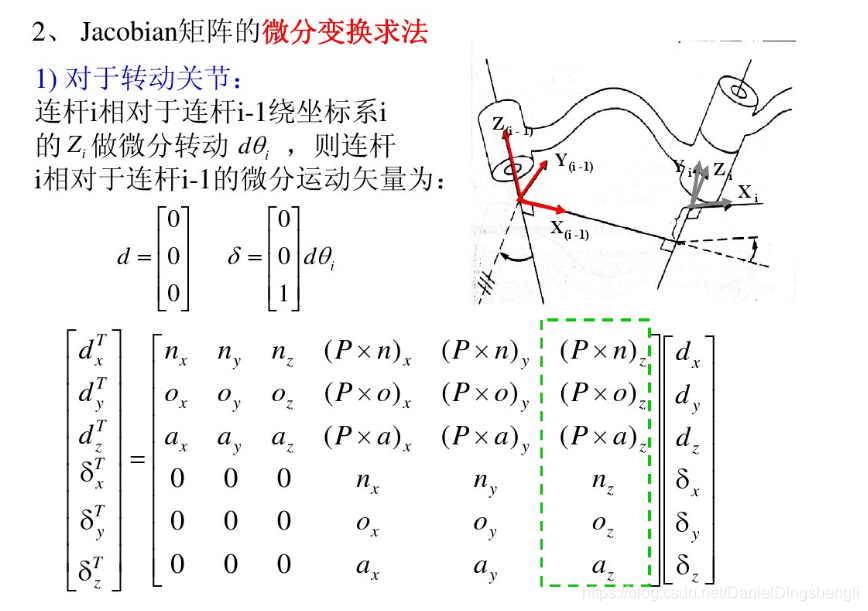
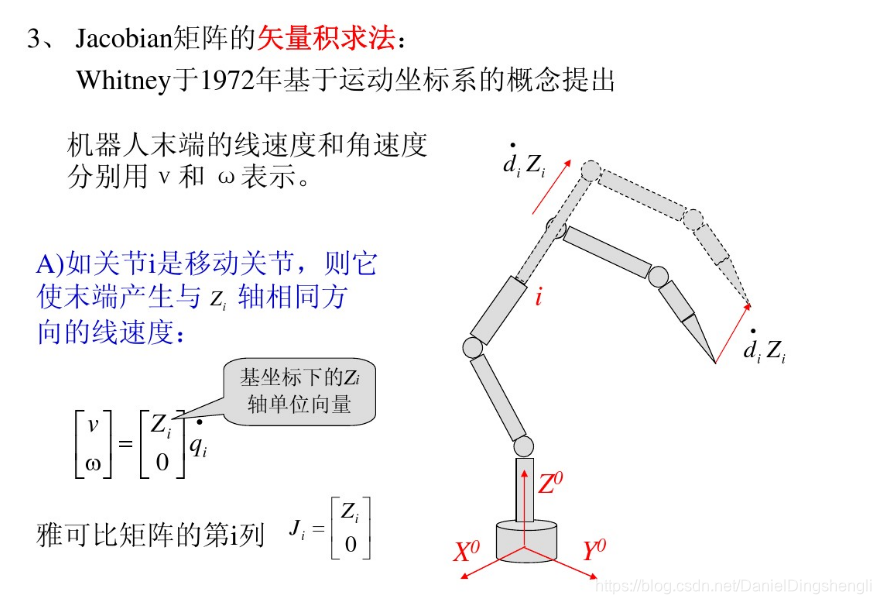
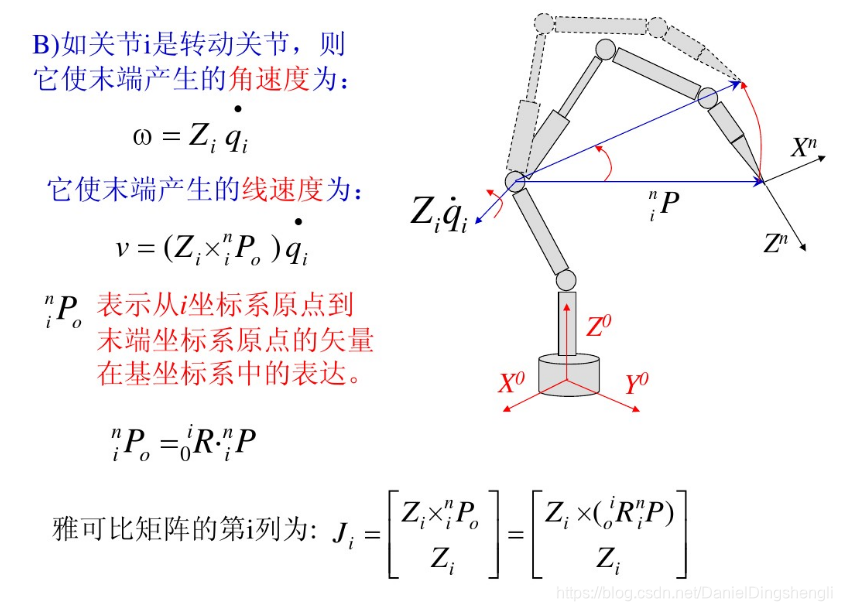
雅可比矩阵的每一列代表对应的关节速度对末端的线速度和角速度的影响
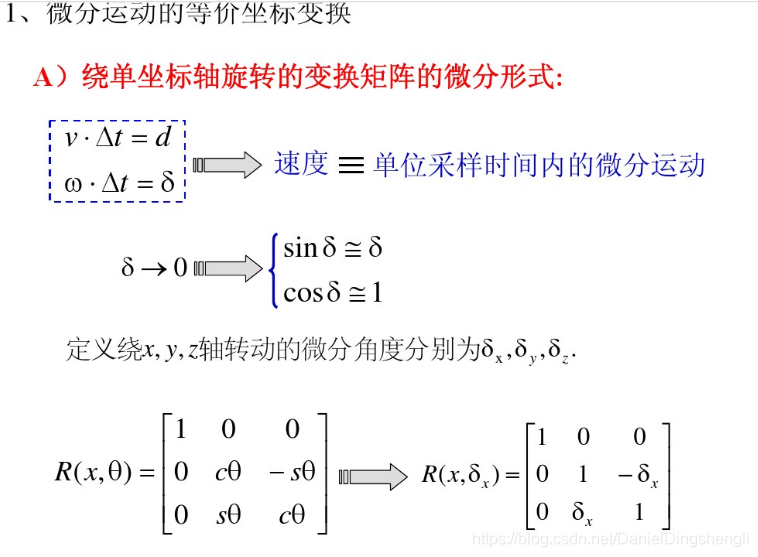
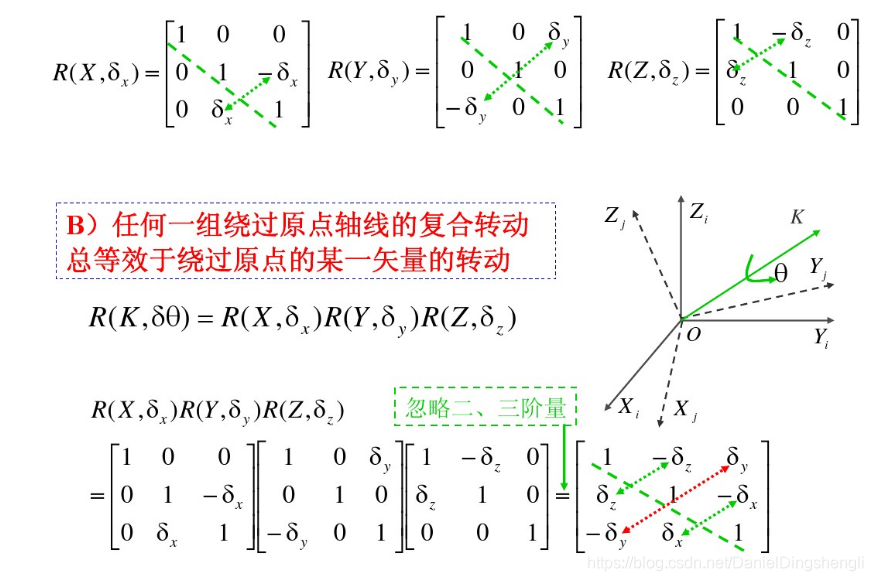
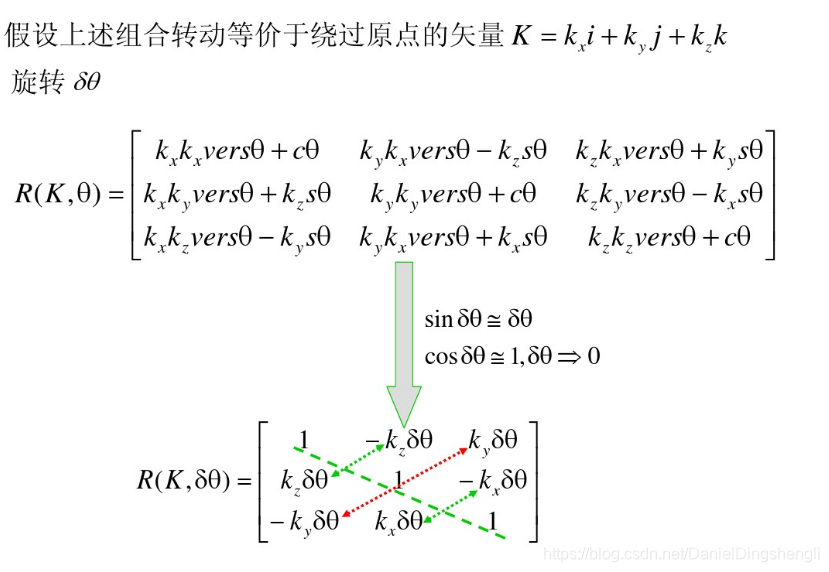

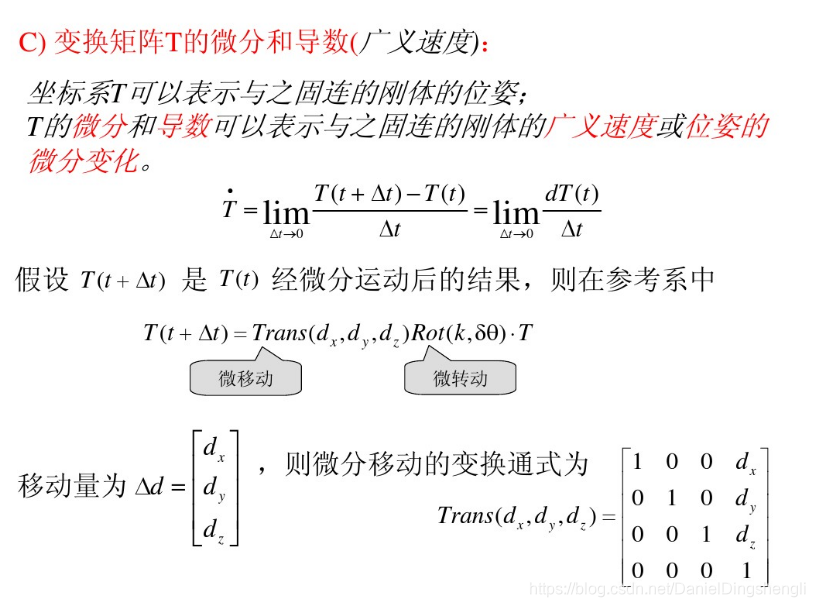
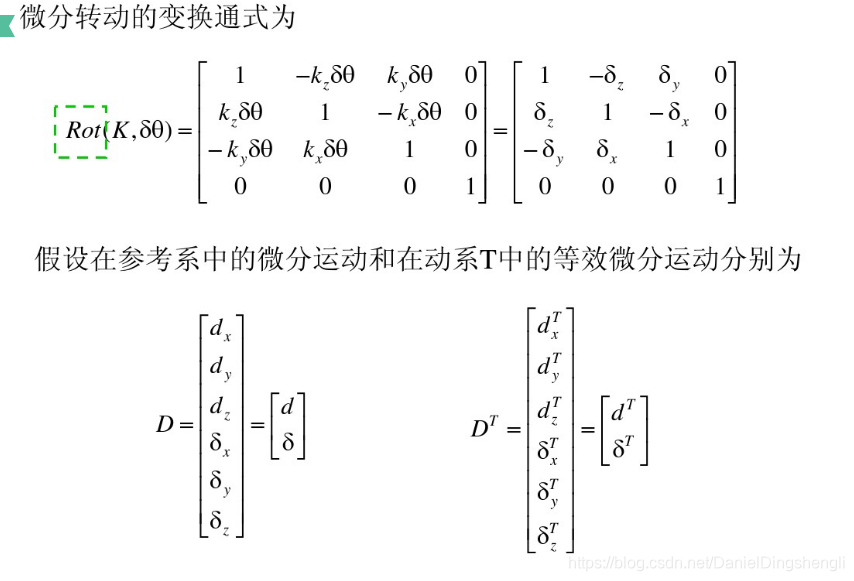
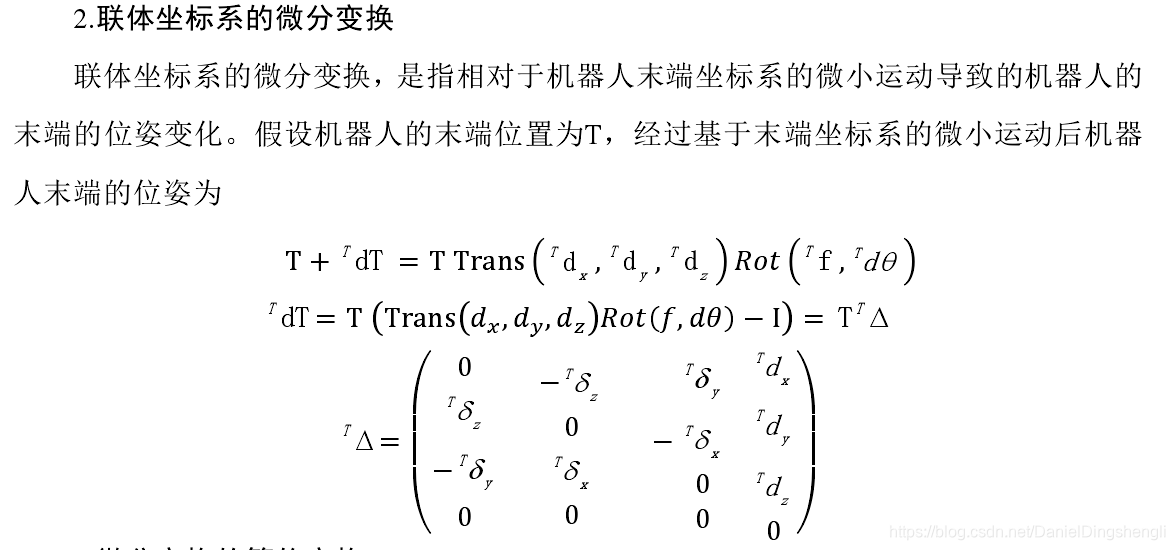
微分算子
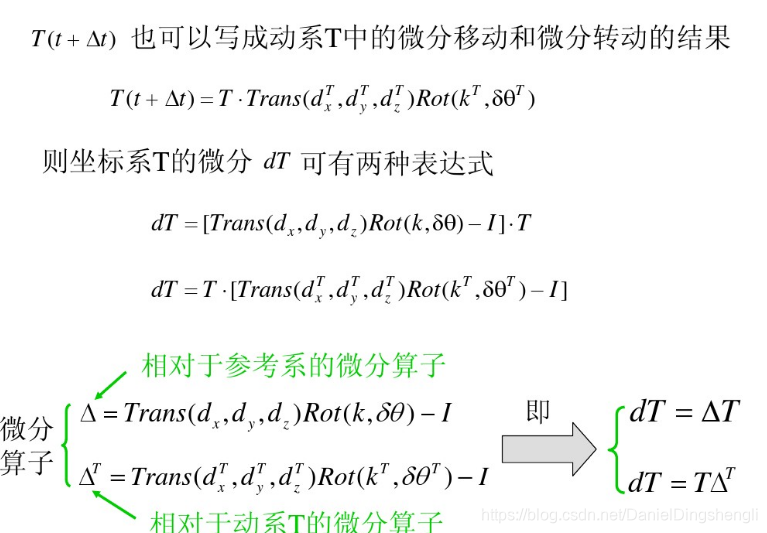
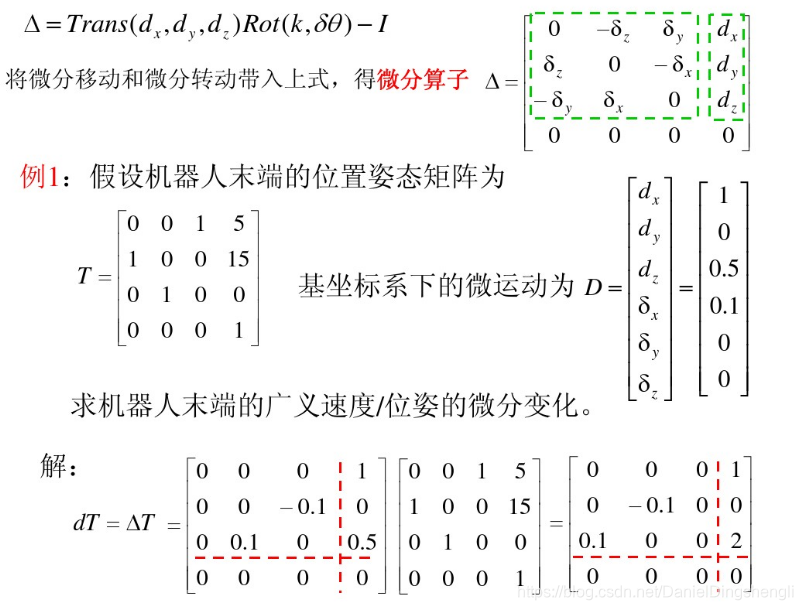
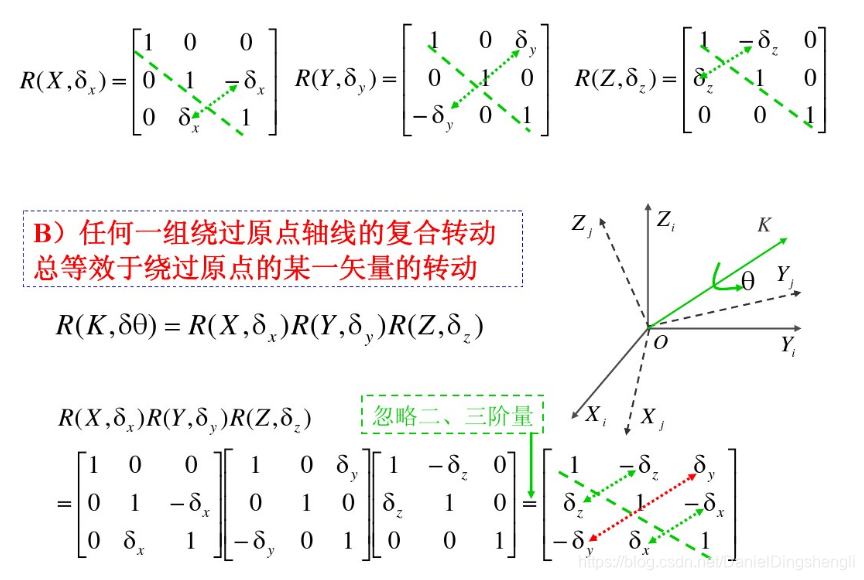
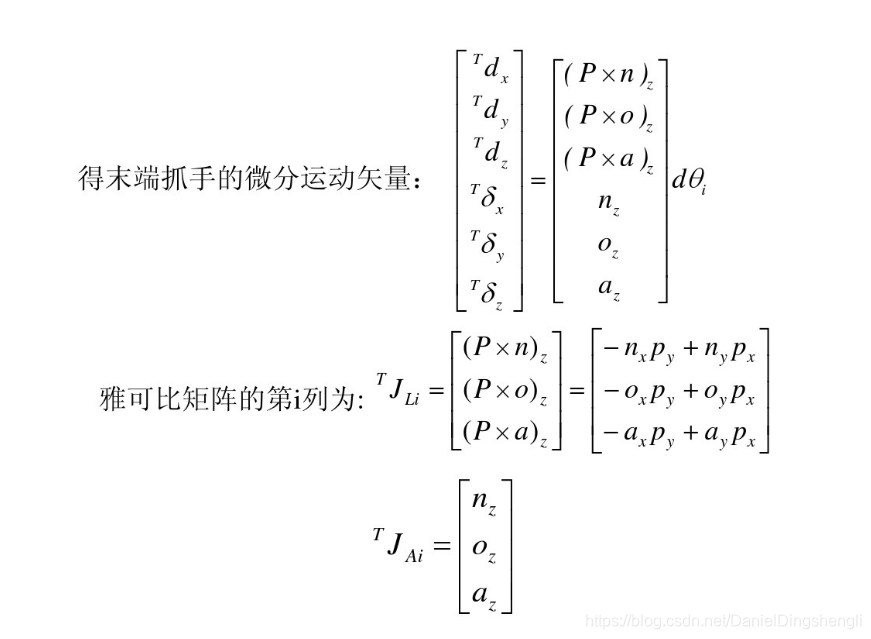
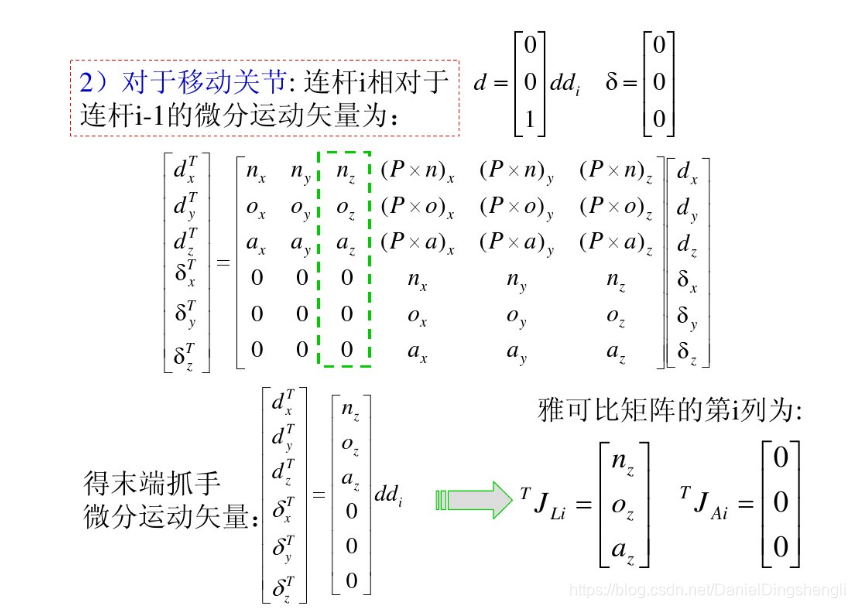
微分变换求法
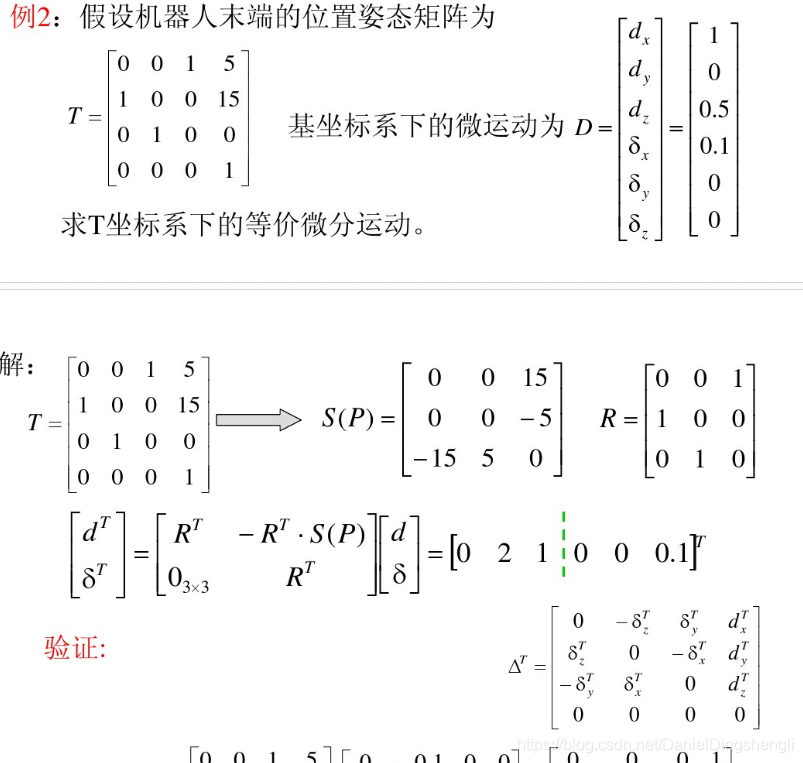
联体坐标系的微分变化
奇异位形
于无穷大,这样会对机构造成较大的损坏。机器人如何避开奇异点的处理是公认的难题。
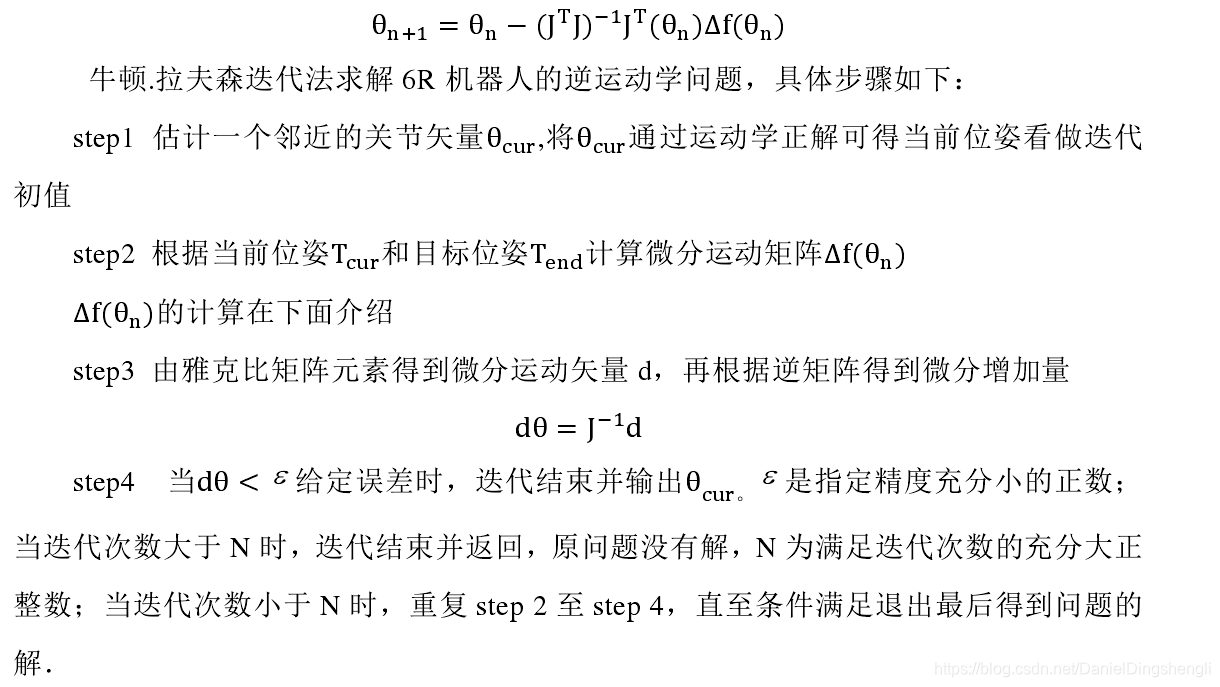
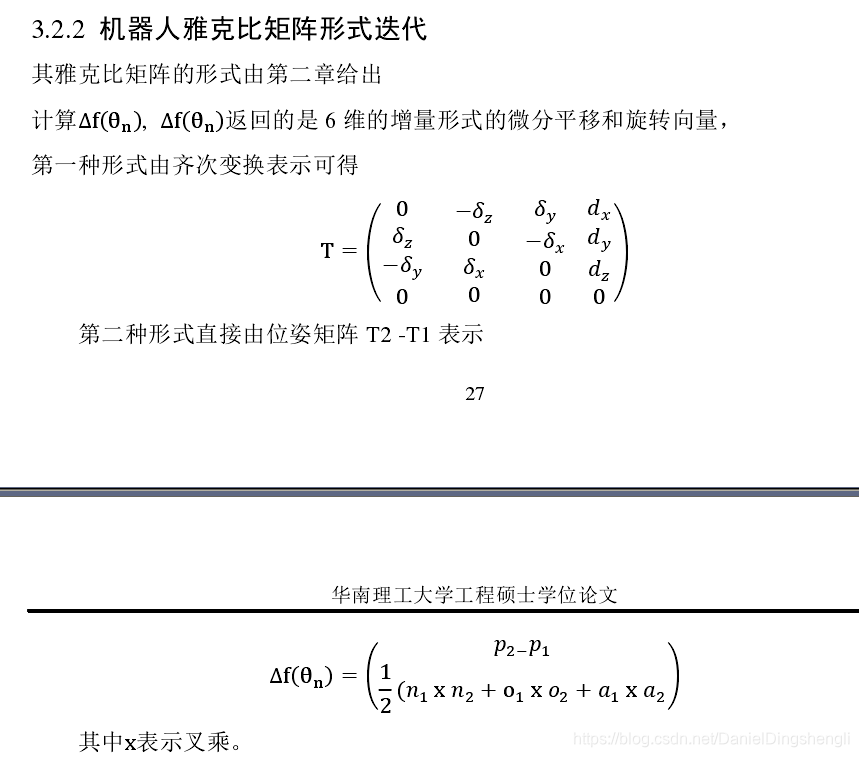
牛顿.拉夫森迭代法