机器人运动学问题主要是研究机器人关节变量与末端执行器位置和姿态间的关系,包括正运动学问题以及逆运动学问题。

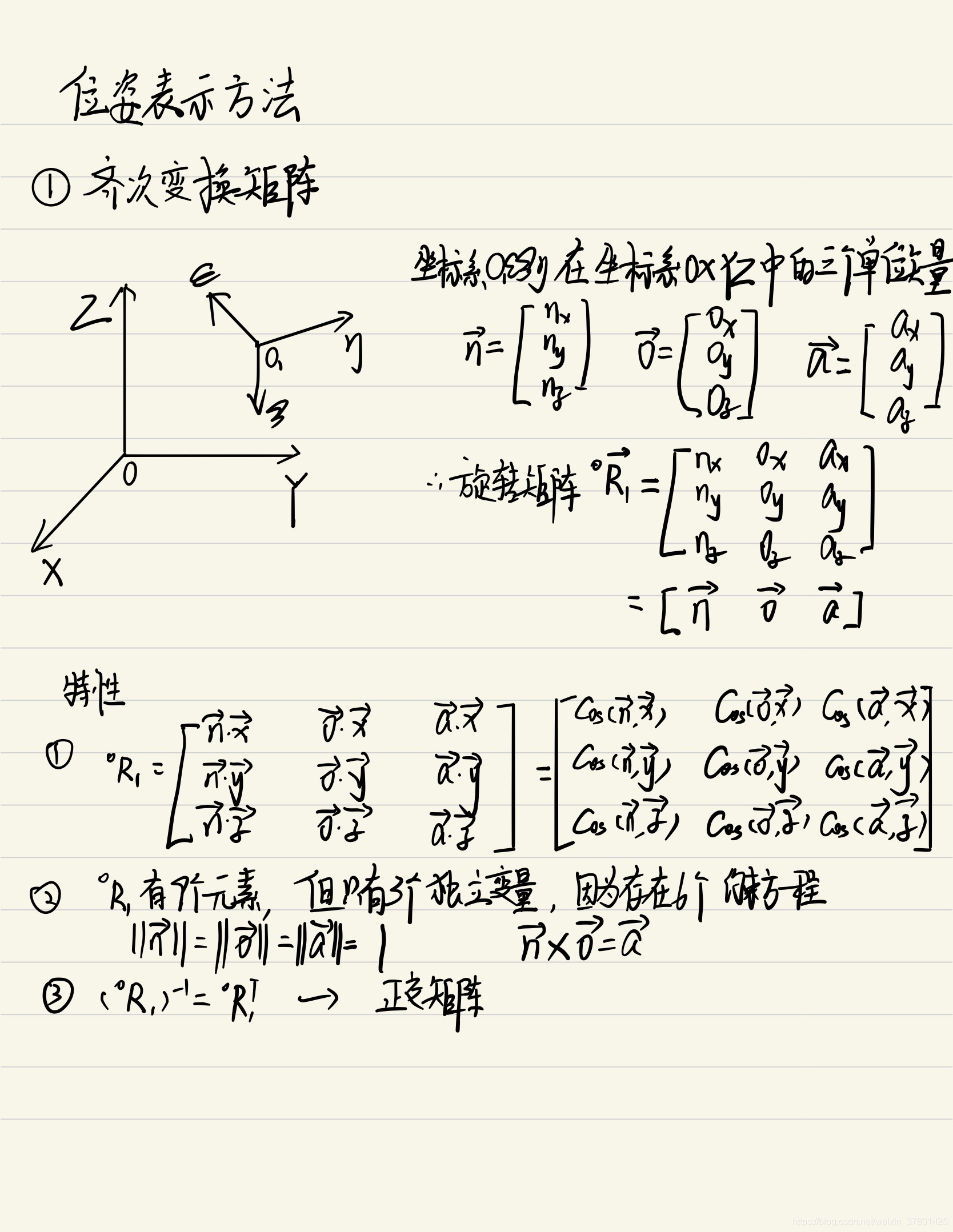
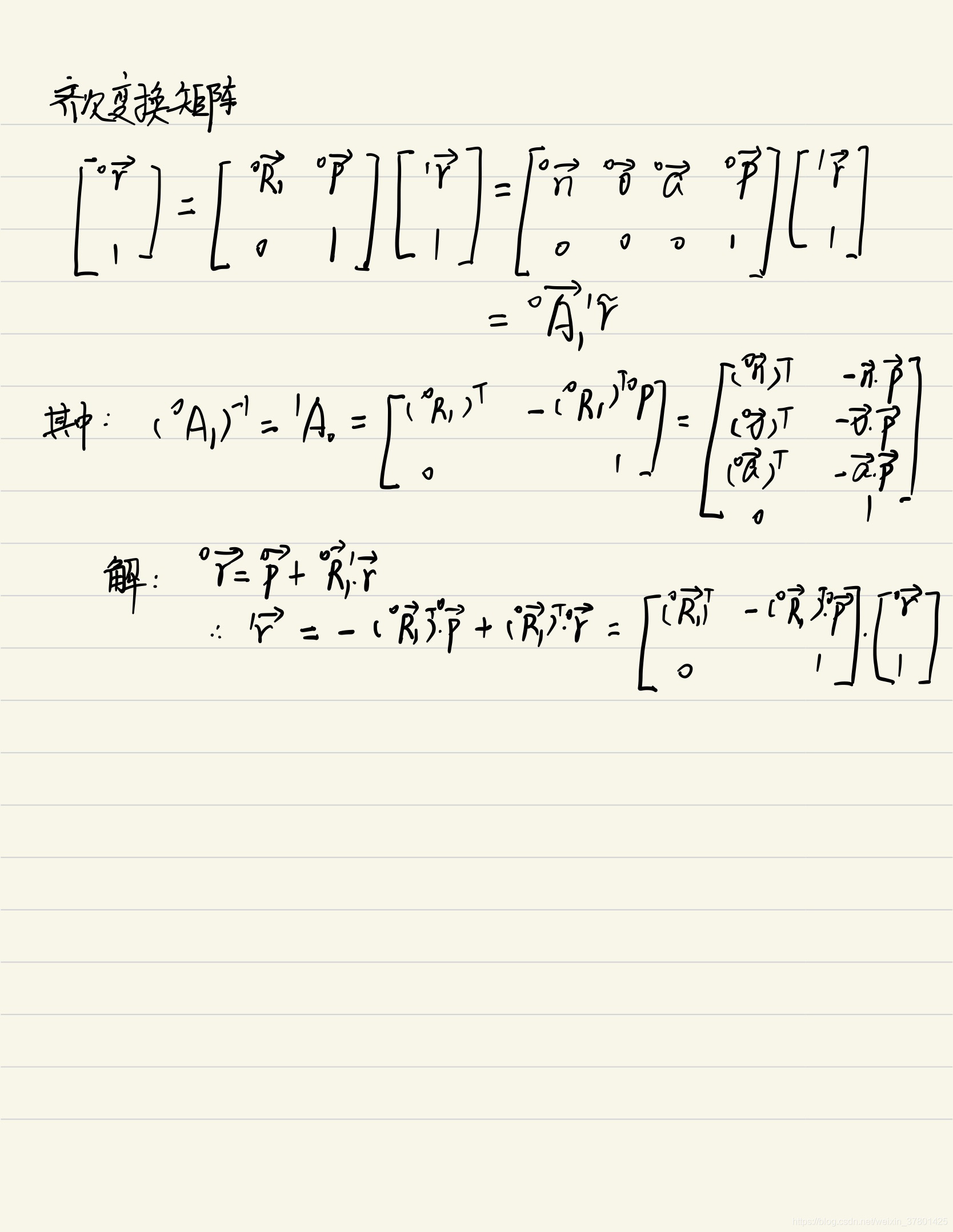
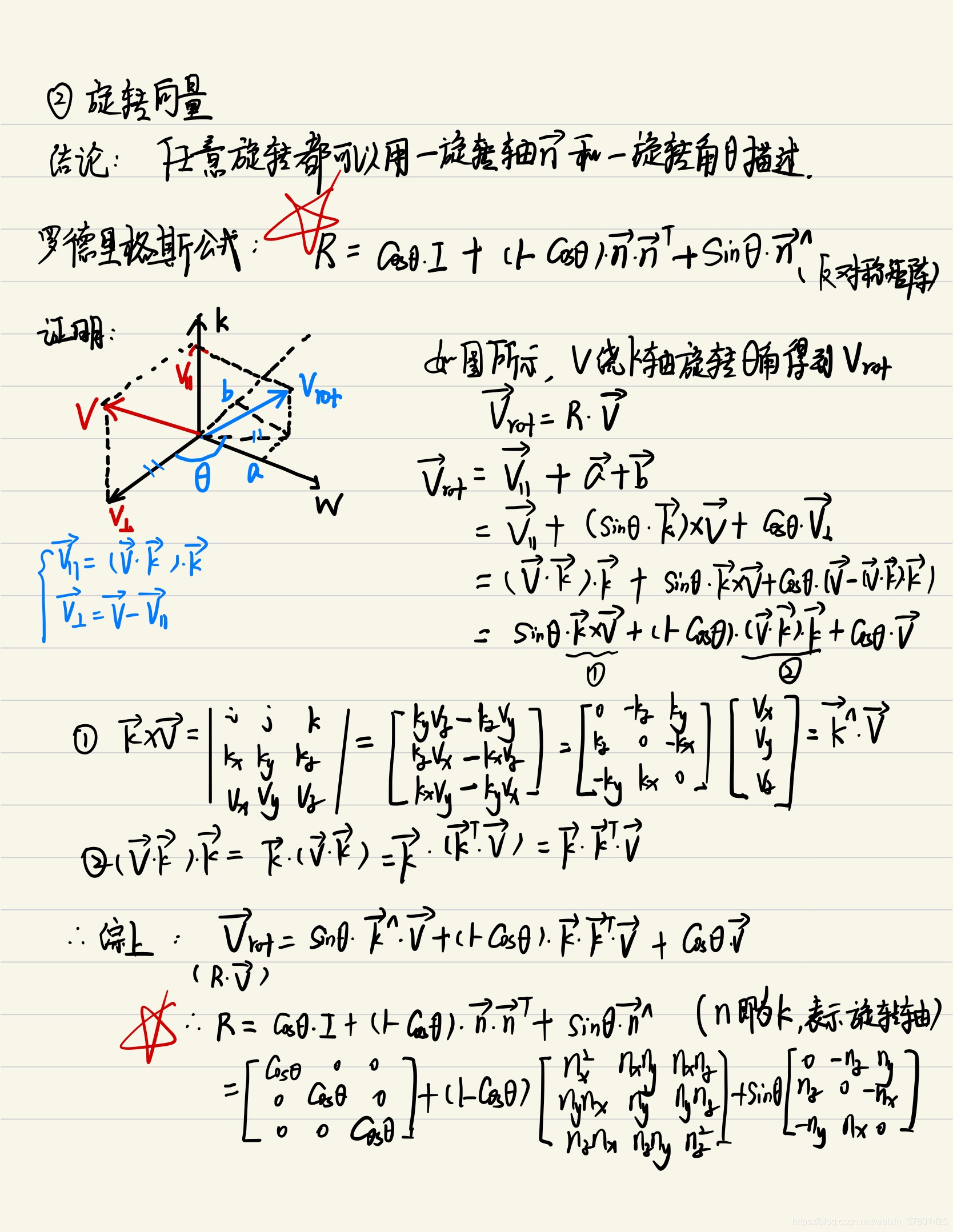
机器人运动学-位姿表示方法

猜你喜欢
转载自blog.csdn.net/weixin_37801425/article/details/104757622
今日推荐
周排行