本篇将会三维空间中,对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算
首先,我们来看三维空间中简图:
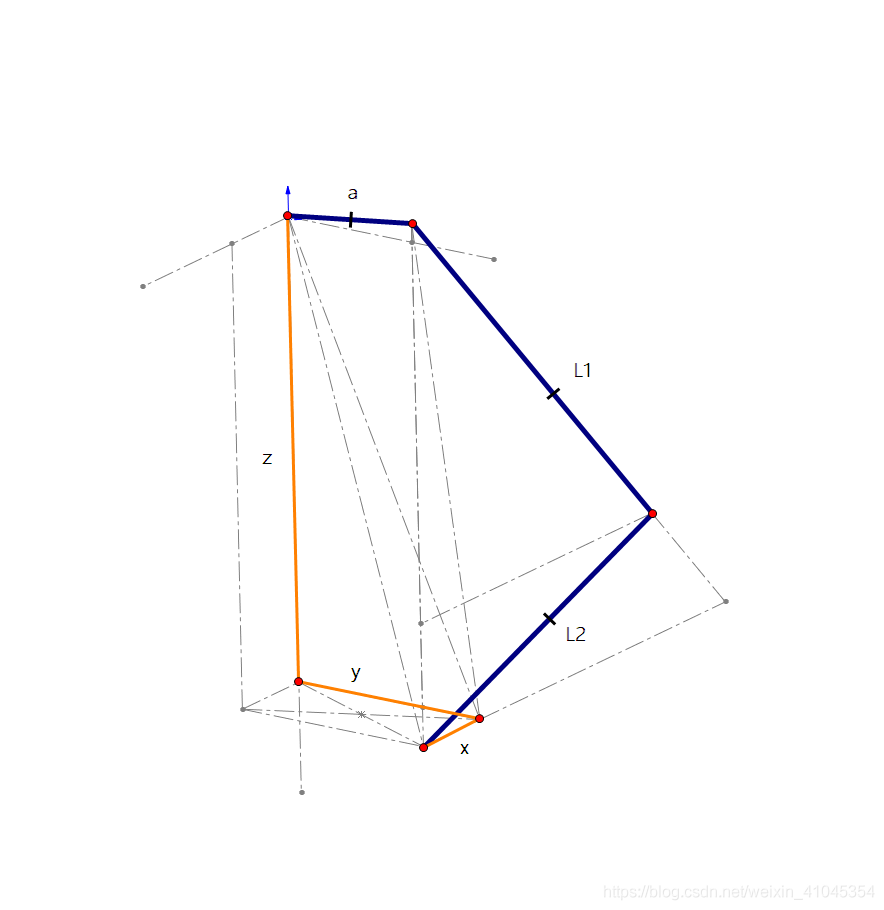
其中a表示髋关节距离主体得偏移,L1,L2共面,与a保持垂直关系
正视图:
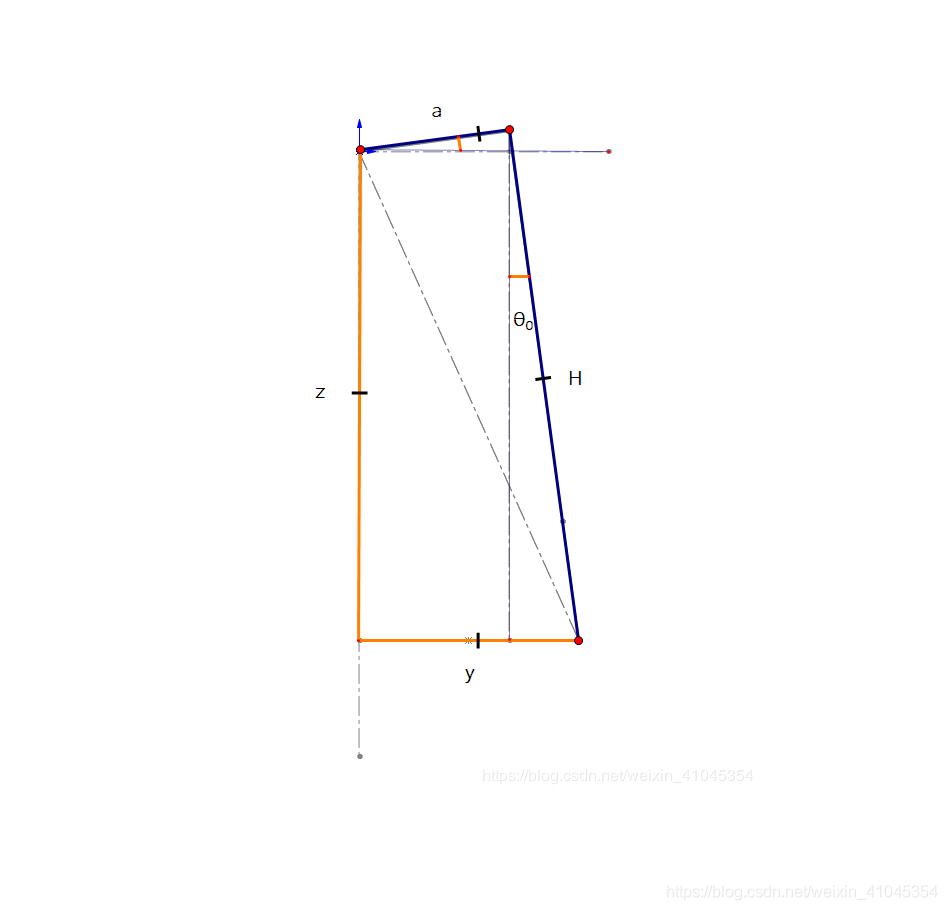
我们可以得出以下几何关系:
1、正解
z=−Hcos(θ0)+asin(θ0)(1-1)
y=acos(θ0)+Hsin(θ0)(1-2)
2、逆解
H2=z2+y2−a2(2-1)
α=atan2(H,∣z∣)−atan2(∣z∣,y)(2-2)
右视图
虽说是右视图,但我们最好不要将其想象成水平向右观看的视图,这里的右视图指的是L1,L2所在平面的视图。这里其实跟二维情况下无疑。H的长度相当于原本的Y轴上的距离。这里就不再重新推导,详情请查看文章
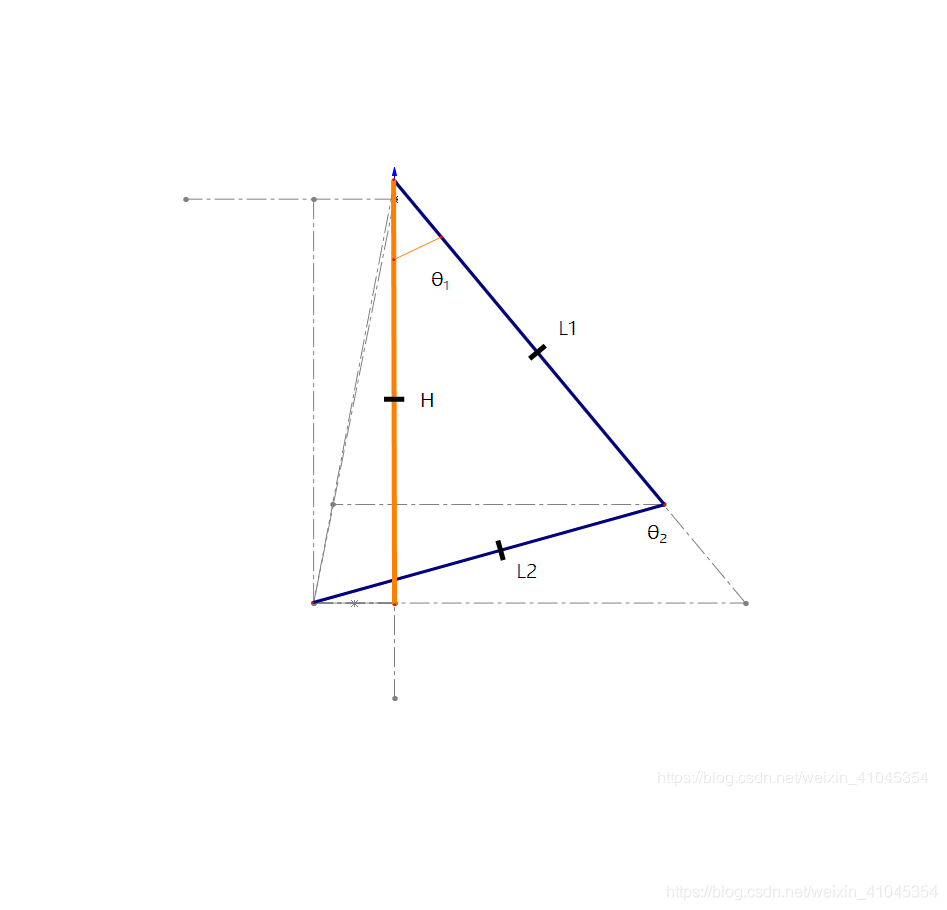
1、正解
H=L1cos(θ1)+L2cos(θ1+θ2)(1-3)
x=L1sin(θ1)+L2sin(θ1+θ2)(1-4)
2、逆解
c2=2L1L2−L12−L22+x2+H2)
s2=1−c22
θ2=atan2(s2,c2)
θ1=atan2(−z,x)−atan2(L2s2,L1+L2∗c2)
