对机器人建模,常用的方法是DH建模。若要对机器人进行建模,需要在机器人的各个关节上建立关节坐标系,再确定各个关节坐标系之间的变换矩阵Tn。故我们需要找到各关节之间的连杆参数 才可确定变换矩阵Tn。

图中的连杆参数定义如下:
an = 沿Xn轴,从Zn移动到Zn+1的距离,叫连杆距离
αn = 绕Xn轴,从Zn旋转到Zn+1的角度,叫扭转角
dn = 沿Zn轴,从Xn-1移动到Xn的距离,叫连杆偏距
θn = 绕Zn轴,从Xn-1旋转到Xn的角度,叫关节角
根据自己想要建立的模型,结合机器人实际的机械尺寸,结合即可把以上4个参数求出。
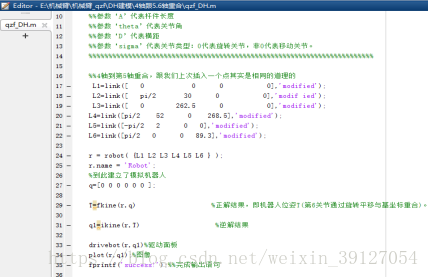
可以利用MATLAB仿真出建立的机器人模型,还需要添加机器人工具箱,这里我使用的是robotic_toolbox_8.0工具箱。把4个参数带入到工具箱的函数里,即求出各个关节的变换矩阵Tn,以及从基座标系到机器人末端坐标系的变换矩阵T。
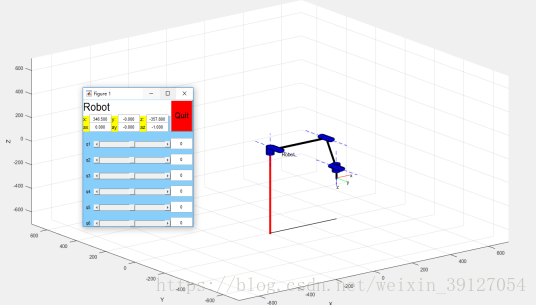
通过以上的方法,仿真出来的机器人模型如下所示。