- ros2:在window11的WSL下
- unity:window11下的2022.1.20f1c1
一、配置方法:
- 下载发行版:打开仓库:
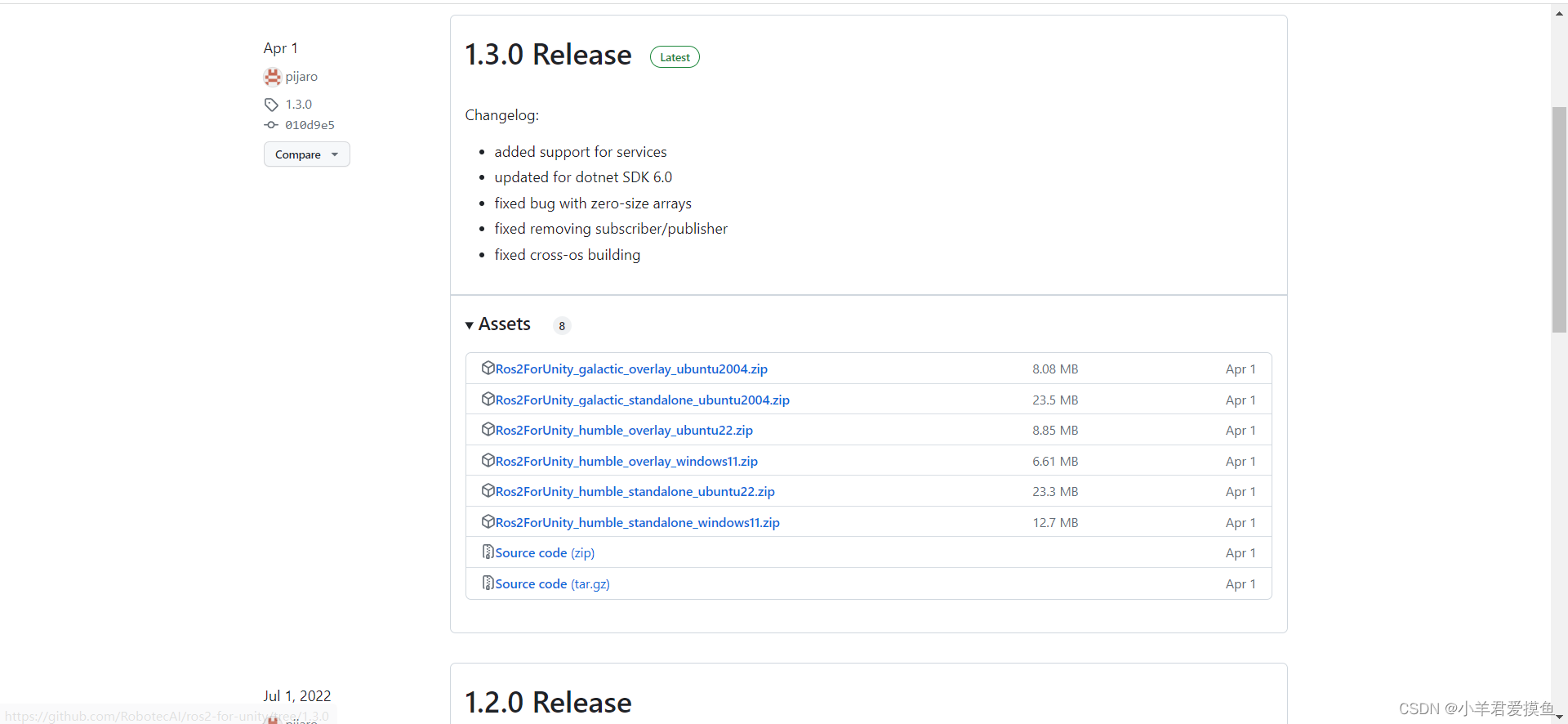
- 下载Ros2ForUnity_humble_standalone_windows11.zip
- 解压

- 创建一个unity3D项目

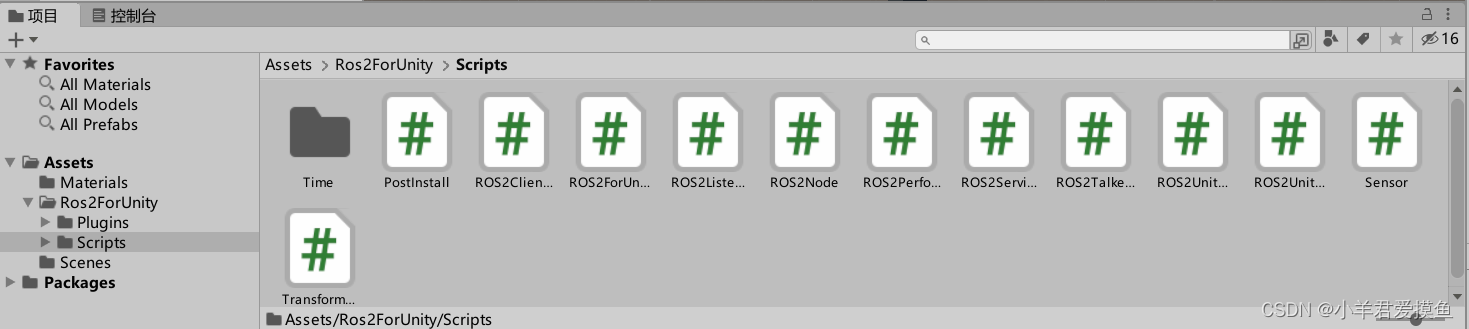
- 打开项目文件,将解压后的Ros2ForUnity文件夹拖入Assets文件夹下
二、测试
- 打开Ros2ForUnity下的Scripts文件夹
- 新建一个游戏对象,将脚本:ROS2UnityComponent和ROS2ListenerExample拖拽至游戏对象

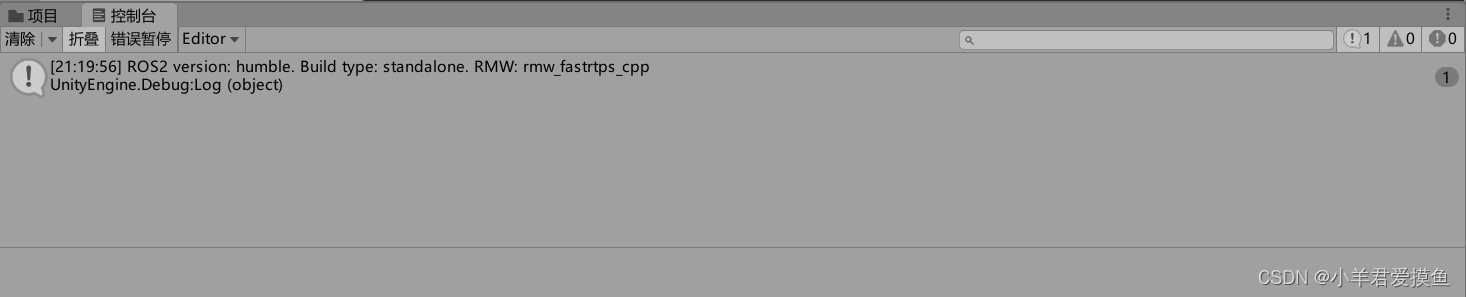
- 运行unity后:
- 打开wsl,输入
ros2 topic list
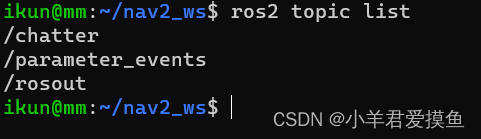
可以看到unity上监听的/chatter
- 输入:
ros2 topic pub /chatter std_msgs/String "data: 'Hello World'"
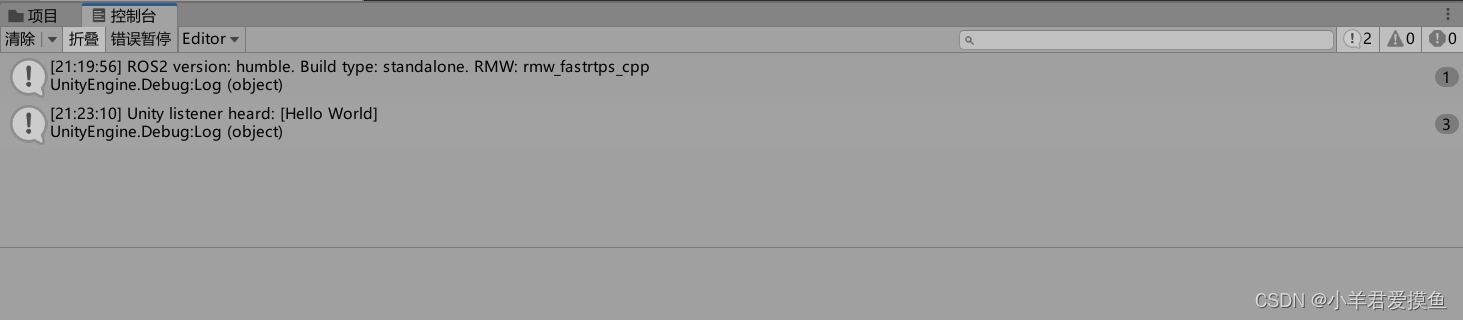
可以看到unity中输出了Hello World,验证完毕!
三、补充
- 如果需要自定义消息类型,还是需要git clone整个项目下来进行编译。