提示:小乌龟测试;ROS2内置的小乌龟案例;
启动一个绘有小乌龟的窗口,代码如下(示例):
ros2 run turtlesim turtlesim_node
代码如下(示例):
ros2 run turtlesim turtle_teleop_key
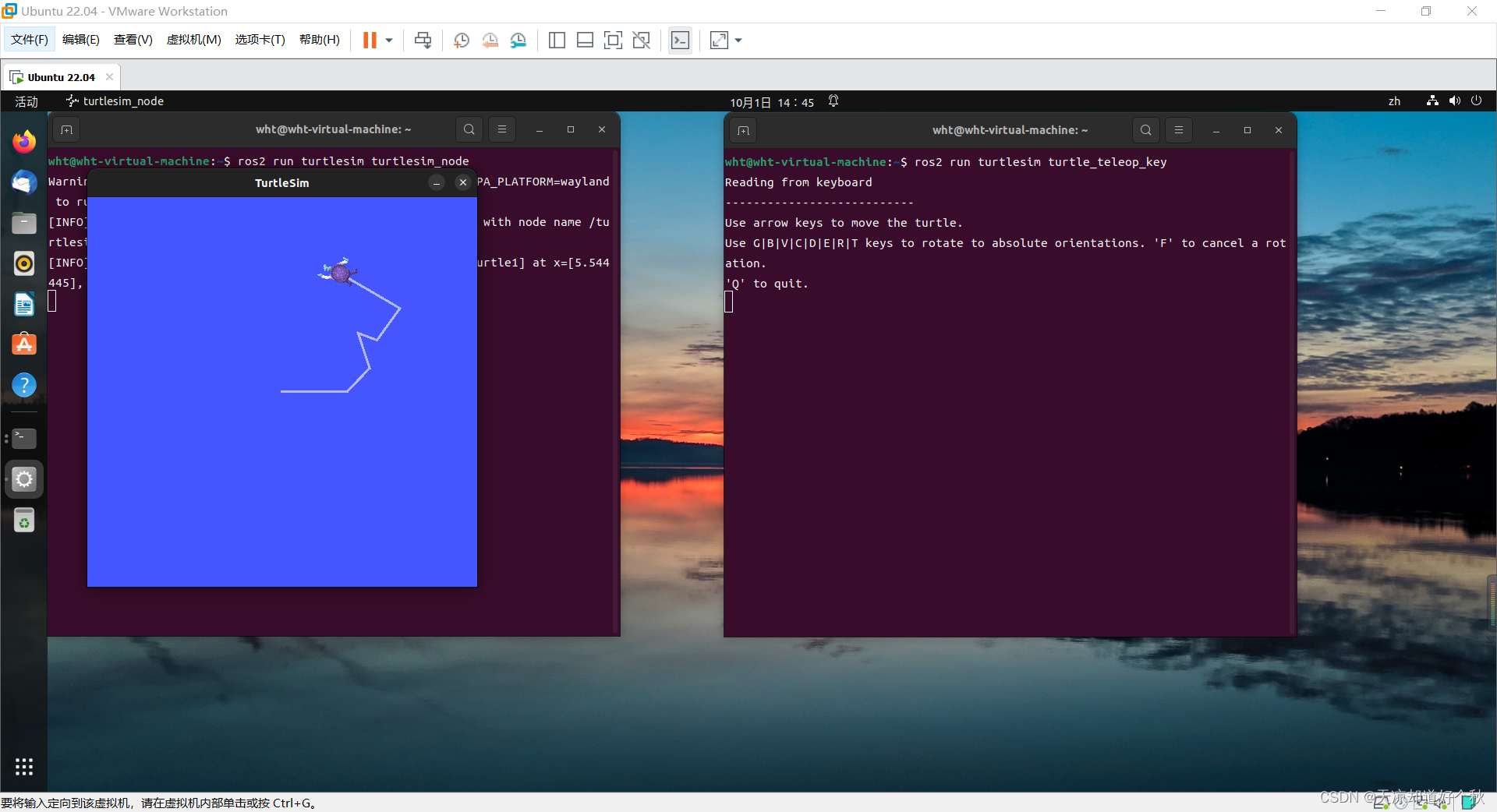
运行结果示例如下:
初步体验ROS2,感受到了去中心的魅力