ROS2官方安装
https://docs.ros.org/en/galactic/Installation/Ubuntu-Install-Debians.html
本来想找一下和ros1一样的安装指导文档,可以根据自己的系统选择。不过没有找到一个直接的说明教程。
不过在ROS2的各个版本安装说明里面有写支持哪些版本的系统。
比如我使用的是ubuntu20.04 安装的就是foxy版本的ROS2。这个也是目前使用最多的版本。
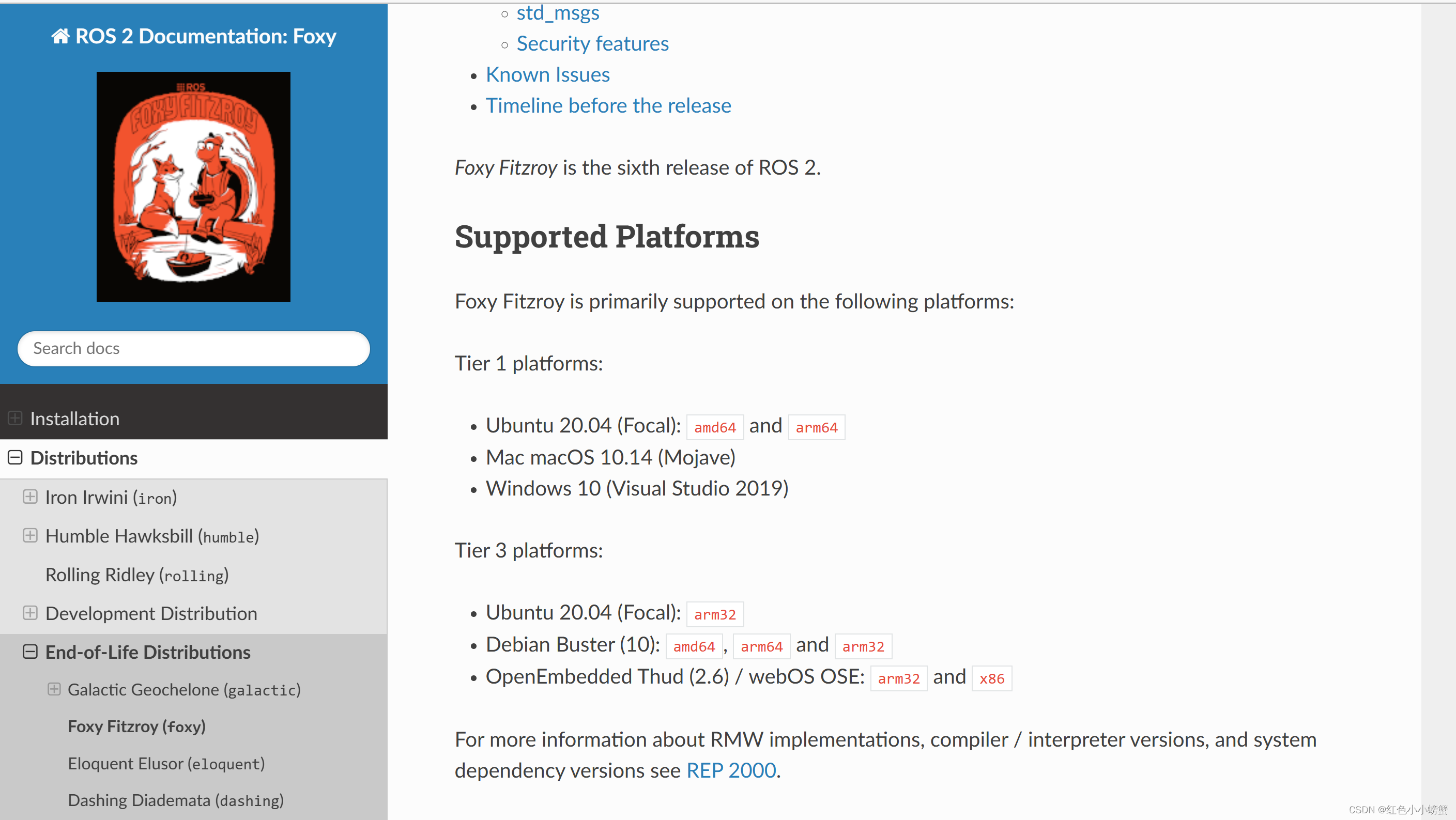
其他的一些版本我大概看了一下,目前ROS2支持的最低的ubuntu版本就是20.04.所以如果使用的是比较低的系统版本,建议升级一下系统。我自己没有试过在低版本的上面安装,所以也不确定是否会有其他问题。
安装步骤
网上还有官方教程都有介绍的通过源码安装的方式。个人不太建议,因为安装过程需要科学上网,而且过程比较长,中间很容易出问题。还是通过安装包比较容易。对于初学者比较友好。
1.设置编码格式
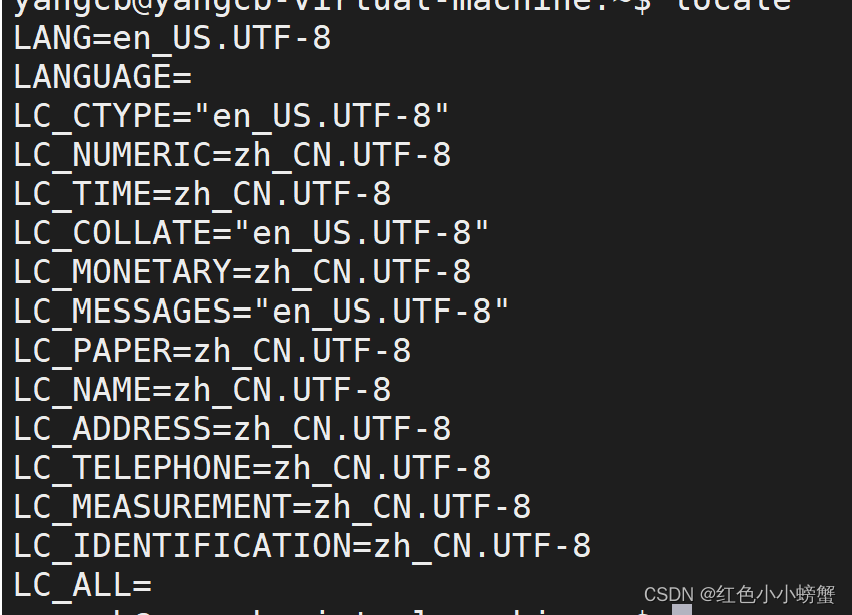
ubuntu系统默认的可能不支持UTF-8编码,所以需要确认自己系统,保证支持UTF-8编码
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
设置成功后悔显示向下面这样
2. 设置源
sudo apt install software-properties-common
sudo add-apt-repository universe
3. 添加 ROS 2 GPG key
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt upgrade
4. ROS2安装
可以选择安装桌面版本或者base版本,对于初学者还是建议安装桌面版本,会包括各种sample和rviz等工作。下面的安装命令里有一个python3-argcomplete这个是python的自动补全包,其实就是为了方便在命令行操作的时候双击tab键能够自动补全。
桌面版本安装
sudo apt install ros-foxy-desktop python3-argcomplete
Base版本安装
sudo apt install ros-foxy-ros-base python3-argcomplete
5. 设置环境变量
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
6. 测试sample
如果安装的是桌面版本,可以直接运行sample,看一下效果
新打开一个终端
ros2 run demo_nodes_cpp talker
再打开一个终端
ros2 run demo_nodes_py listener