1 topic通信机制
1.1 发布/订阅模型
Topic通信模型是一种发布订阅模型,ROS2使用了基于DDS的发布/订阅模型,数据传输过程如下图:
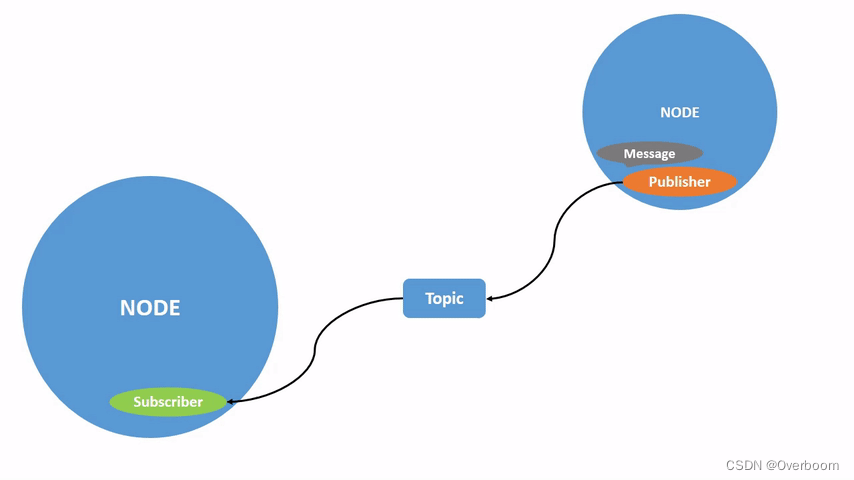
话题数据传输的特性是从一个节点到另外一个节点,发送数据的对象称之为发布者,接收数据的对象称之为订阅者,每一个话题都需要有一个名字,传输的数据也需要有固定的数据类型。
1.2 topic通信规则
需要满足以下规则:
- 话题名字是关键,发布订阅接口类型要相同,发布的是字符串,接受也要用字符串来接收;
- 同一个节点可以订阅多个话题,同时也可以发布多个话题,就像一本书的作者也可以是另外一本书的读者;
- 同一个小说不能有多个作者(版权问题),但跟小说不一样,同一个话题可以有多个发布者。
1.3 异步通信
话题通信还有一个特性,那就是异步。所谓异步,只要是指发布者发出数据后,并不知道订阅者什么时候可以收到,类似古月居公众号发布一篇文章,你什么时候阅读的,古月居根本不知道,报社发出一份报纸,你什么时候收到,报社也是不知道的。这就叫做异步。
异步的特性也让话题更适合用于一些周期发布的数据,比如传感器的数据,运动控制的指令等等,如果某些逻辑性较强的指令,比如修改某一个参数,用话题传输就不太合适了。
2 topic代码实现
2.1 新建工作空间
在编码之前,要创建工作空间
mkdir -p dev_ws/src
cd dev_ws/src
ros2 pkg create learning02_topic --build-type ament_cmake
创建完工作空间之后的目录结构如下:
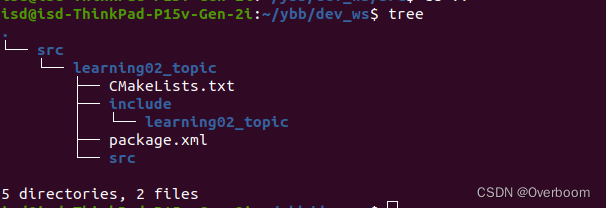
2.2 publisher编码
publisher.cpp
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
2.3 subscriber编码
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using std::placeholders::_1;
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSubscriber>());
rclcpp::shutdown();
return 0;
}
2.4 CMakeLists.txt编码
cmake_minimum_required(VERSION 3.5)
project(learning02_topic)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(talker src/publisher.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
add_executable(listener src/subscriber.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
ament_package()
2.5 package.xml编码
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>learning02_topic</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="[email protected]">isd</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
<exec_depend>rclcpp</exec_depend>
<exec_depend>std_msgs</exec_depend>
</export>
</package>
3 编译运行
# 编译
colcon build
# source环境变量
source install/setup.sh
# 运行publisher
ros2 run learning02_topic listener
# 运行subsriber
ros2 run learning02_topic talker
4 topic和node常用指令
node指令
# 启动节点
ros2 run <package_name> <node_name>
# 显示当前活动节点
ros2 node list
topic指令
# 显示当前活动topic
ros2 topic list
# 打印topic内容
ros2 topic echo <topic_name>
# 显示topic频率
ros2 topic hz <topic_name>
# 显示topic信息
rot2 topic info <topic_name>