摄像机模型之有限摄像机
基本针孔模型 令投影中心位于一个欧氏坐标系的原点,而平面
z=f
被称为图像平面或聚焦平面。在针孔摄像机模型下, 空间坐标为
X=(X,Y,Z)T
,从世界坐标到图像坐标的中心投影是:
(X,Y,Z)T→(fX/Z,fY/Z)T
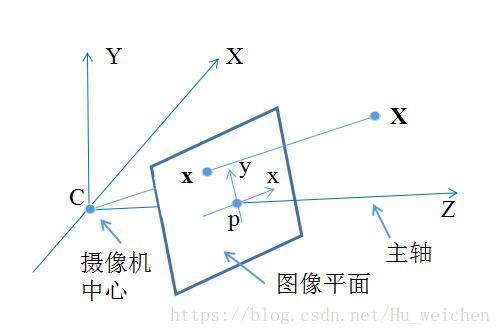
投影中心称为
摄像机中心,也称为
光心。摄像机中心到图像平面的垂线称为摄像机的
主轴或
主射线,而主轴与图像平面的交点称为
主点。过摄像机中心平行于图像平面的平面称为摄像机的
主平面。
用齐次坐标表示中心投影:
⎛⎝⎜⎜⎜XYZ1⎞⎠⎟⎟⎟→⎛⎝⎜fXfYZ⎞⎠⎟=⎛⎝⎜ff1000⎞⎠⎟⎛⎝⎜⎜⎜XYZ1⎞⎠⎟⎟⎟
上式也可以表达成:
x=PX
其中:
P=diag(f,f,1)[I|0]
上面讨论的图像平面的坐标原点在主点上,现在讨论一般情况下的映射:
x=K[I|0]Kcam
其中
Xcam
为摄像机坐标系,摄像机标定矩阵
K
:
K=⎛⎝⎜ffpxpy1⎞⎠⎟
摄像机旋转与位移
Xcam=(R0T−RC~1)⎛⎝⎜⎜⎜XYZ1⎞⎠⎟⎟⎟=(R0T−RC~1)X
其中
X
表示世界坐标系,
C~
表示摄像机中心在世界坐标系中的坐标,
R
表示摄像机坐标系的方位。
综合前面的公式有:
x=KR[I|−C~]X
一般的针孔摄像机
P=KR[I|−C~]
有9 个自由度: 3 个来自
K
,3 个来自
R
, 3 个来自
C~
。
K
中的参数称为摄像机内部参数或摄像机的内部校准。
R
和
C~
并称为外部参数或外部位准。摄像机矩阵可简化成:
P=K[R|t]
其中
t=−RC~
。
CCD摄像机
K=⎛⎝⎜αxαyx0y01⎞⎠⎟
其中
αx=fmx
,
αy=fmy
,
x0=mxpx
,
y0=mypy
。
mx
和
my
分别是在x 和y 方向上图像坐标单位距离的像素数。因此, 一个CCD摄像机有10个自由度。
有限射影摄像机
K=⎛⎝⎜αxsαyx0y01⎞⎠⎟
其中增加的参数s 称为扭曲参数。对大多数标准的摄像机来说,其扭曲参数为零。一个有限射影摄像机有11 个自由度。