原文连接
接下来,我们就可以把ROS2安装到Ubuntu系统中了。安装步骤如下:
1. 设置编码
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2. 添加源
$ sudo apt update && sudo apt install curl gnupg lsb-release
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
如遇报错“Failed to connect to raw.githubusercontent.com”,可参考解决”Failed to connect to raw.githubusercontent.com“报错 - 古月居
3. 安装ROS2
$ sudo apt update
$ sudo apt upgrade
$ sudo apt install ros-humble-desktop
4. 设置环境变量
$ source /opt/ros/humble/setup.bash
$ echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
至此,ROS2就已经在系统中安装好了。
ROS2示例测试
为了验证ROS2安装成功,我们可以通过以下示例进行测试。
示例一:命令行示例
先来试试ROS2最为重要的底层通信系统DDS是否正常吧。
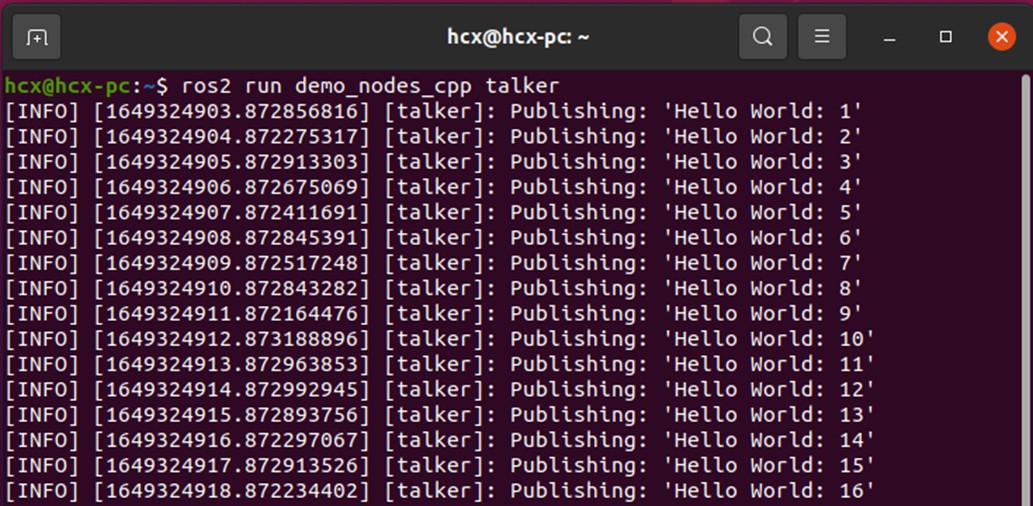
启动第一个终端,通过以下命令启动一个数据的发布者节点:
$ ros2 run demo_nodes_cpp talker
启动第二个终端,通过以下命令启动一个数据的订阅者节点:
$ ros2 run demo_nodes_py listener
扫描二维码关注公众号,回复:
17318569 查看本文章

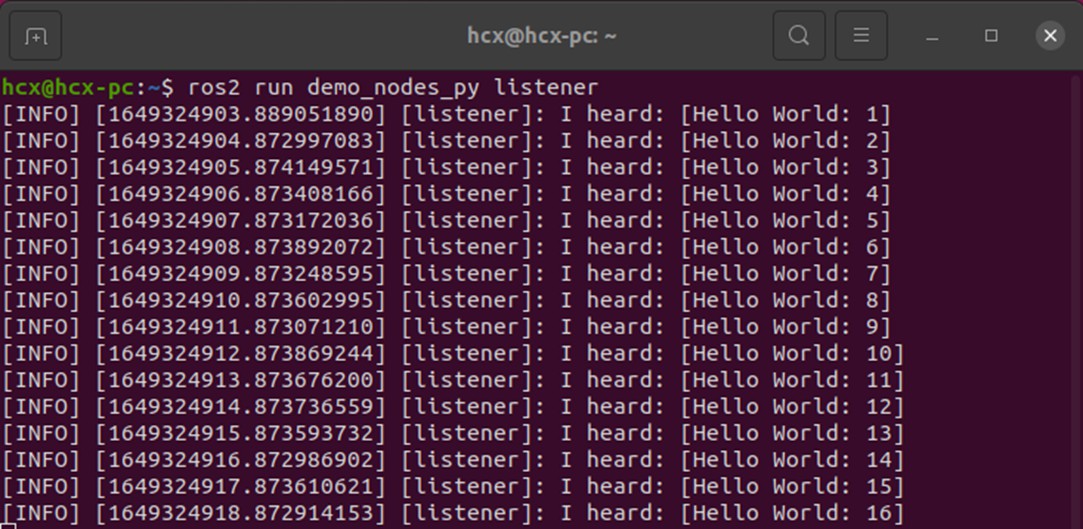
如果“Hello World”字符串在两个终端中正常传输,说明通信系统没有问题。
示例二:小海龟仿真示例
再来试一试ROS中的经典示例——小海龟仿真器。
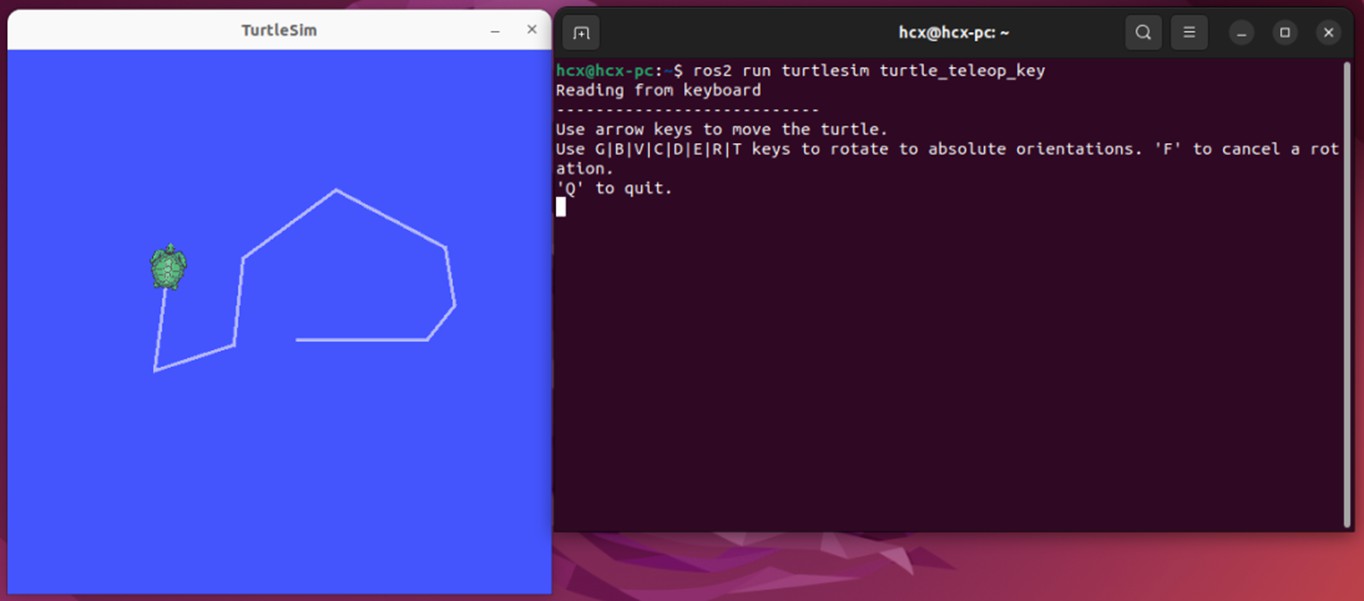
启动两个终端,分别运行如下指令:
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle_teleop_key
第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键,就可以控制小海龟运动啦。
关于小海龟中蕴藏的ROS奥义,我们在后续教程中将持续探索。
至此,ROS2安装成功。