系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!
本文先对规划-运动规划motion planning做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、功能
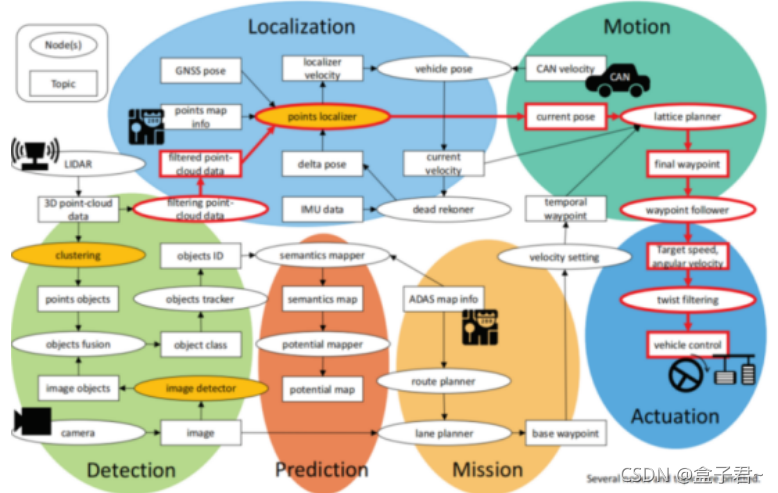
planning负责根据给定的一段temporal waypoint轨迹生成局部可行轨迹全局轨迹,考虑到车辆状态,三维地图所示的位置及其局部的障碍物分布情况,周围对象、交通规则和期望的目标,在局部环境下,规划出来一条最优的路径
.
.
二、输入
【temporal waypoint】
一段带有速度的轨迹
.
.
【current velocity】
定位与车底盘CAN里程计反馈融合得到的车辆当前速度
.
.
【current pose】
定位模块提供的车辆当前位姿
.
三、输出
【final waypoint】
无人车执行的最终轨迹
.
.
四、算法流程实现
【velovity_planner(velocity setting)】
在base waypoint的基础上,截取的一小段路径,并进行速度规划/设置,得到一段带有速度的轨迹temporal waypoint,更新车辆速度信息,注意到给定跟踪的waypoint里面是带有速度信息的,这个模块就是根据车辆的实际状态进一步修正速度信息,以便于实现在停止线前面停止下来或者加减速等等
算法原理我写在了另外的博客,转战一下:
【速度轨迹优化】double S曲线进行机械臂轨迹和无人驾驶路径的速度都规划
【Trajectory optimization】对轨迹点进行设置、插值、平滑方法
.
.
【astar_planner】
实现Hybrid-State A*查找算法,生成从现在位置到指定位置的可行轨迹,【防盗标记–盒子君hzj】这个模块可以实现避障,或者在给定waypoint下的急转弯,也包括在自由空间内的自动停车
算法原理我写在了另外的博客,转战一下:
【路径生成–图搜索的方法】贪心算法、Dijkstra和A类路径搜索算法【经典】
【路径生成–更复杂启发式的图搜索算法】hybird A算法(较常用)
.
.
【adas_lattice_planner】
实现了State Lattice规划算法,事先定义好的参数列表和语义地图信息,基于mini_jerk样条曲线实现局部路径生成与优化,在当前位置前方产生了多条可行路径,最终得到无人车执行的最终轨迹final waypoint,可以被用来进行障碍物避障或车道线换道
算法原理我写在了另外的博客,转战一下:
【路径生成+轨迹优化–无人驾驶规划器】Lattice planner算法
【五次样条路径生成并Frenet坐标系解耦轨迹优化】基于Frenet坐标系的无人车轨迹生成并优化方法
.
.
【open_planner】
实现路径生成与优化
算法原理我写在了另外的博客,转战一下:
【路径生成 + 轨迹优化–无人驾驶场景规划器】OpenPlanner算法
.
.