动画网址
运动规划
- front-end: path finding (global planner)
- back-end: trajectory generation(local planner or controlling planner)
path finding
- search-based
- graph search basis
- Dijskra/A*
- jump point search
- sampling-based
- probabilistic road map (PRM)
- rapid-exploring random tree (RRT)
- optimal sampling based method
- advanced sampling base method
- kinodynamic
- state-state boundary valude optimal control problem
- state lattice search
- kinodynamic rrt*
- hybrid A*
trajectory generation
- minimum SNAP trajectory generation
- differential flatness
- minimum smap optimization
- closed-form solution to minimum snap
- time allocation
- implementation in pratice
search-based method
graph includes vertices(节点) and edges(边)
grid-based graph: use grid as vertices, use grid connections as edges
- BFS
- DFS
- DIJSKRA (all-direction; DFS, 最优)
- A*(不一定是最优)
- JPS
map represention
-
occupancy grid map
二维,2.5维栅格, 导航地图- Most dense
- structural
- direct index query
-
octomap
八叉树- sparse
- structural
- indirect index query
-
voxel hashing
哈希,建立hash-table,sfm- Most sparse
- structural
- indirect index query
-
point cloud map
- un-ordered
- no index query
- pcl lib
-
TSDF map
Truncated Signed Distance Map
-OpenChisel project -
ESDF
- Euclidean Signed Distance Functions
- incremental update
-
Configuration
- Robot Configuration : a specification of the positions of all point of robot
- DOF: the minimum number of n of real -valued coordiantes
- Robot Configuration Space: a n-dim space containing all possible robot configuration, C-Space
- mobile robot: 3-dim , (x,y.theta)
- 6 axis arm: 6-dim,(x,y,z,r,p,y)
- Each robot pose is a point in the C-Space
-
planing in C-space
- robot is represented by a point in C-space
- Obstacle need to be represeted in configuration space, C-obstacle (inflate obstacle)
- C-Space = C-obstacle U C-Free
-
Search-Based Method
Graph: nodes(vertices) + edges
Grid-Based Graph: grid as vertices, grid connecdtion as edges-
Graph Search Overview


-
BFS (FIFO, queue)
-
DFS (LIFO), stack)
- queue/stack 代表以上提到的search 使用的容器
- container 代表常见算法描述中的open_llist
- remove/expanded 的结点放入closed_list, 用来标记,以后不再访问
- 图索搜 多用BFS
- BFS, DIJSKRA 保证全局最优的,启发式搜索不一定
- A* 不一定是最优,重点在启发代价函数:
- 条件:启发代价函数h < 真实启发代价函数h*, 基本保证是最优的
- 启发函数:Euclidean_distance / Manhattan_distance
-
Dijkstra

- open_list container 使用 priory queue, 优先队列将对容器里的元素进行排序
- 排序按照从小到大的顺序,按照g值排序
- expanded node 放在另一个容器 closed_list,应该也是按照按照g值从小到大排序,因为dijkstra 目标是对于每个点都是最短路径!!
- open_list 还没有被访问,等待被访问的
- if g(m) > g(n) + Cnm 这一行代表m已经在openlist 容器中,所以需要修改cost,使其根据cost自动排序
- 已经被expanded的结点就不需要再处理!
- 当goal 点在目标点在open_list被弹出时即被找到
-
Search Heuristics
greedy best first search
启发函数一般是:距离goal的欧式、棋盘距离 inferring the lease cost to goal -
A*: Dijkstra with a heuristic
A* 本质上和dijkstra 是一样的, 评价函数多了一部分- Accumulated cost: 类似dijkstra 在g(n) , 指当前结点n,到start 的累计cost
- Heuristic cost: 新增的cost,指当前结点n,到goal的估计最小cost,THE Estimated Least cost, h(n)
- 所以 f(n) = g(n) + h(n)
- 策略: 扩展open_list最小的f(n)

-
A* Optimality
h(n) < h*(n) //实际使用启发代价函数小于 真实代价,否则可能产生非最优结果 -
Admissible Heuristics 如何设计启发函数
-
| 启发函数 | 范数 | 是否可行 |
|---|---|---|
| 欧式距离 | L2 norm | 1 |
| 曼哈顿距离 | L1 norm | 如果4链接栅格可以,八连接不可以 |
| 无穷 | 1 | |
| 0 | L0 | 1 |
- sub-optimal solution for A* 次优
均衡搜索效率和结果次优路径,牺牲最优性换取速度
- Weighted A*: f = g + e * h, 一般e >1 意味着搜索时更接近于目标点
- e-suboptimal: cost(solution) <= e*cost(optimal solution)
- it can be orders of magnitude faster than A*
- e = 0 -> dijkstra
- e = 1 -> A*
- e > 1 -> wighted A*
- Weighted A* -> Anytime A* -> ARA* -> D*
- Grid-based Path Search
- occupied grid map
- priority queue in c++
std::priority_queue
std::make_heap
std::multimap
- The Best Heuristic (more tight heuristic)
dx = abs(node.x - goal.x)
dy = abs(node.y - goal.y)
h = dx+dy + ( sqrt(2) - 2 )* min(dx,dy) // 优化欧式距离启发函数,搜索更快 - Tie Breaker
很多点具有相同的f指,打破这种相同f值的情况,使其具有差异- h = h * ( 1 + p )
p = minimum_cost_of_one_step / expected_maximum_path_cost //一个很小的值 - dx1 = abs(node.x - goal.x)
dy1 = abs(node.y - goal.y)
dx2 = abs(start.x - goal.x)
dy2 = abs(start.y - goal.y)
cross = abs(dx1 * dx2 - dx2 * dy1)
h = h + cross * 0.001
- h = h * ( 1 + p )
- Jump Point Search
系统性消灭(打破)路径对称性的方法,也是一种tie breaker
core idea: 找到对称性,并打破他们
区别于A*: explore all symmetric path
JPS choose one path, JPS explores intelligently, because it always look ahead based on a rule (look ahead rule)
特点:复杂环境(迷宫),大型地图, 大部分情况下,JPS 速度更快
缺点:robot with limited Fov,会在会在未知区域或者空旷区域一直搜索;仅在uniform grid map- how it works with its rules
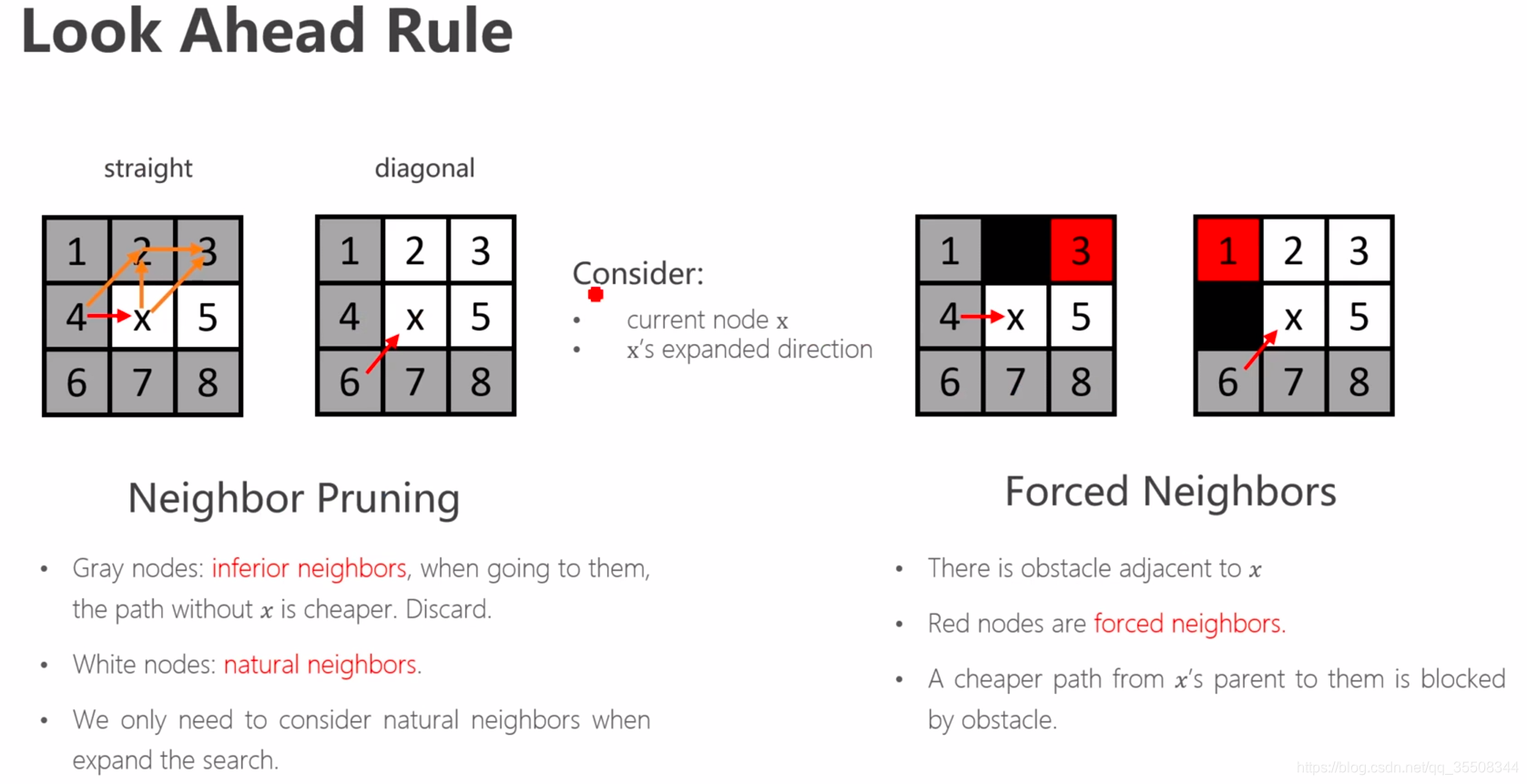
x : 当前结点
4:当前结点x的父亲结点
5:当前结点x 在接下来搜索方向 (附近没有障碍物时,会递归的按照水平或者竖直方向一直向前探索,直到遇到forced neighbors, 这就是打破对称性) - Jumping Rules

执行水平/竖直 规则,直到遇到forced neibor y, y作为x 的跳跃点
执行对角线规则,直到遇到forced neibor 节点y, y 作为x 的跳跃点
跳跃过程中,遇到障碍物或者边界,认为该方向上跳跃失败
每个产生forced neibor 的节点 的 父节点 放入 优先队列
当发现一个节点 存在forced node时,这个节点的父节点就是一个跳跃点,将其放入open list;
x节点,就是下一个关键节点,将其放入open list,以后需要对其进行其他水平竖直对角方向的搜索,如果其他方向都搜索结束,没有其他非劣性节点发现时,将其放入closed list
- how it works with its rules
- JPS overview
