无人驾驶实践入门——规划
规划方法:
通过结合高精度地图、定位和预测来构建车辆轨迹
步骤:
路线导航
轨迹规划
规划目标:
找到地图上A前往B的最佳路径
三个输入:
地图
当前地图的位置
目的地
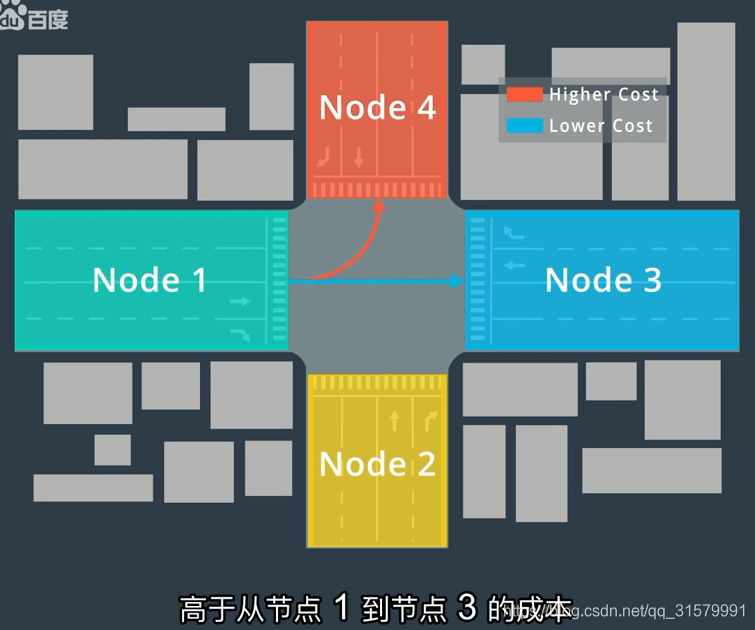
查找路线的方法:
将地图格式化为由“节点”和“边缘”组成的“图形”数据结构,之后采用搜索算法
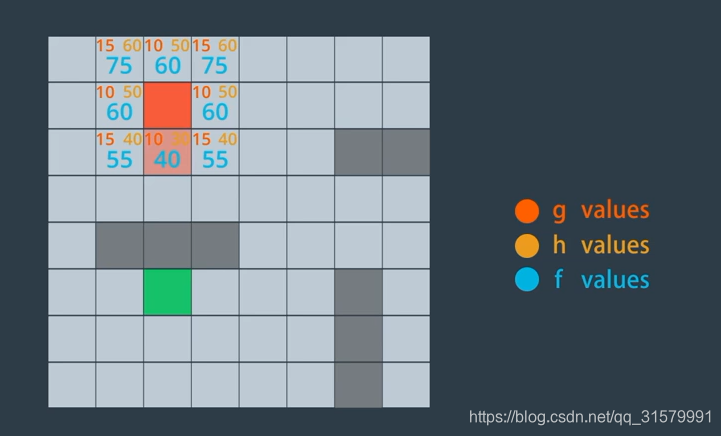
路径查找算法
A*:
计算开始节点到候选节点的成本
估计候选节点前往目的地的成本
对每一个候选节点通过添加g值和h值来计算总和
(g:起始点到候选节点成本,h:候选节点到目的地的估计成本)
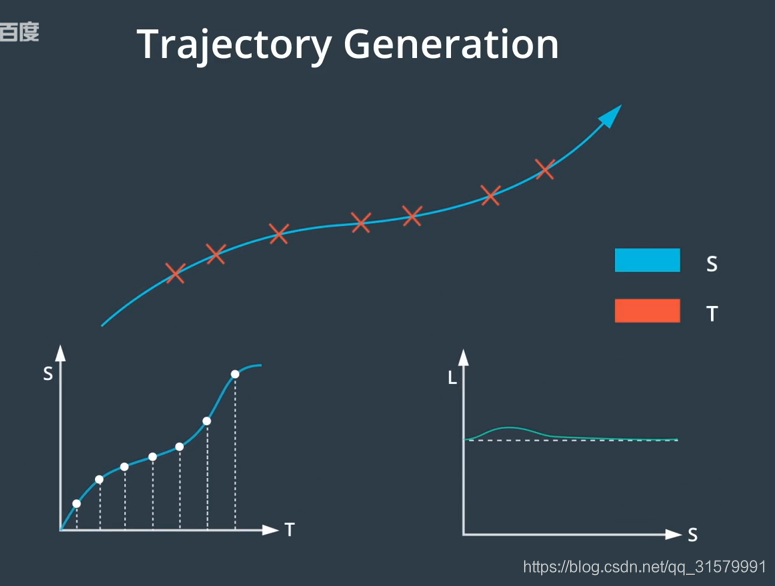
轨迹生成
目标:
生成由一系列路径点所定义的轨迹
通过将时间戳与预测模块结合
轨迹评估:
安全性
舒适性
可行性
轨迹合法性
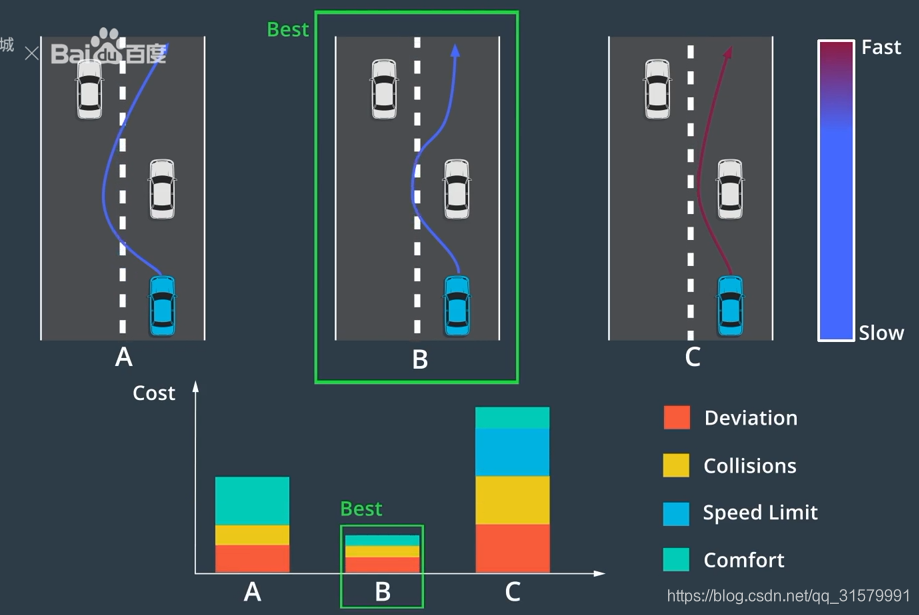
最佳轨迹选择:
使用成本函数,包括偏移、碰撞、速度限制等
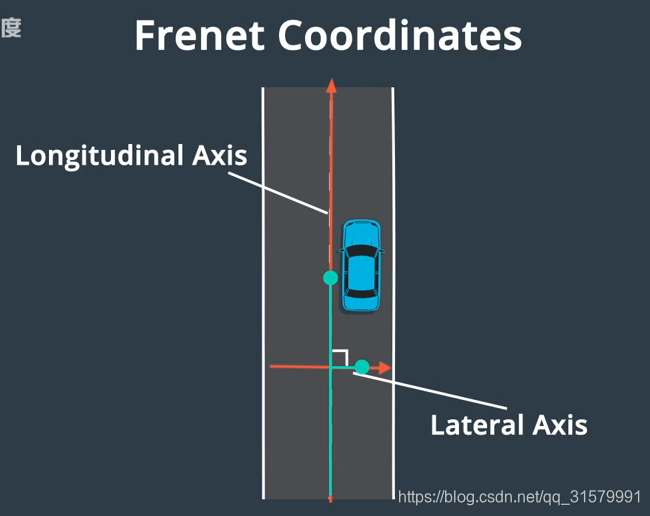
坐标系:
Frenet坐标系
路径速度解耦规划步骤:
将规划分为路径规划与速度规划
使用成本函数评估,选择成本最低的路径
确定行进速度,确定速度曲线
最终构建车辆行车轨迹
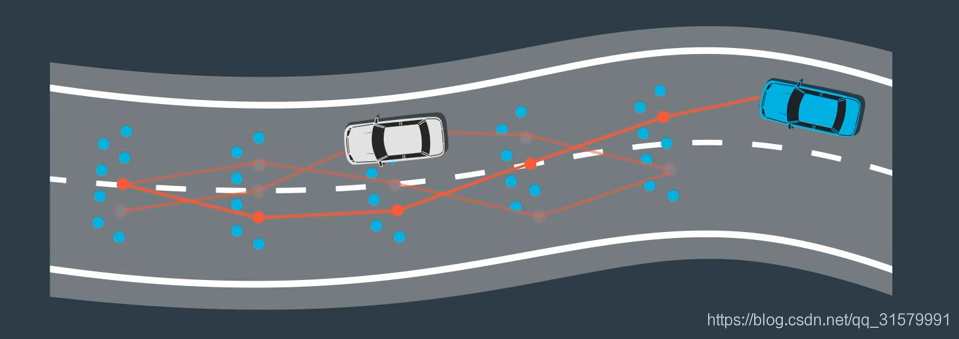
候选路径生成步骤:
将路段分割成单元格
对单元格中的点随机采样创建候选路径
使用成本函数评估筛选
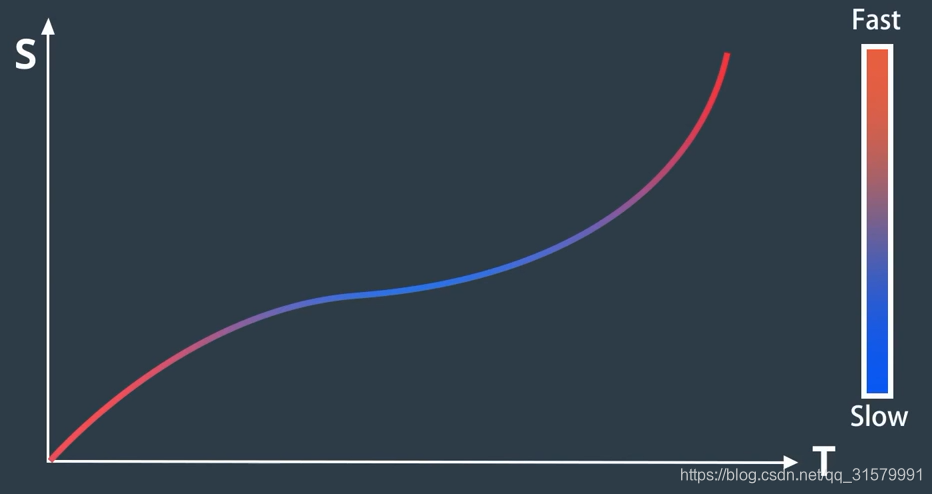
速度曲线方法:
使用ST图描述车辆在不同时间的位置
通过斜率判断速度快慢
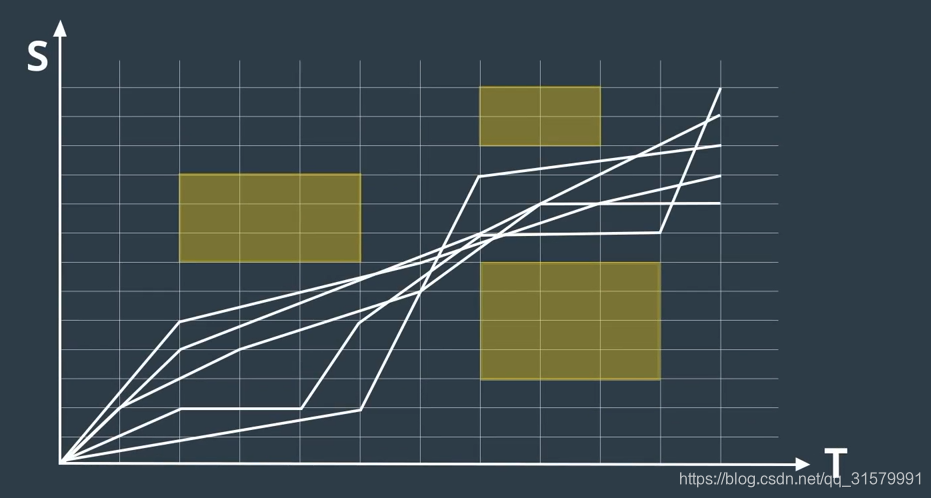
速度规划方法:
分割ST图为多个单元格
构建阻隔区域
通过优化算法搜索路径
平滑化:
应用二次规划优化曲线来生成平滑路径
Lattice规划:
通过Frenet将环境投射到坐标上
目标是生成三维轨迹-纵向维度、横向维度和时间维度
分解为ST轨迹与SL轨迹再合并
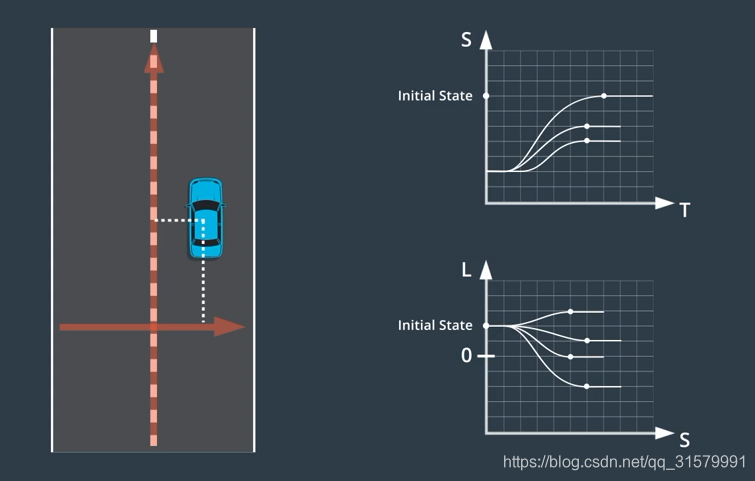
ST轨迹(纵向):
巡航(v不变)
跟随车辆
停止
扫描二维码关注公众号,回复:
11419860 查看本文章

SL轨迹(横向):
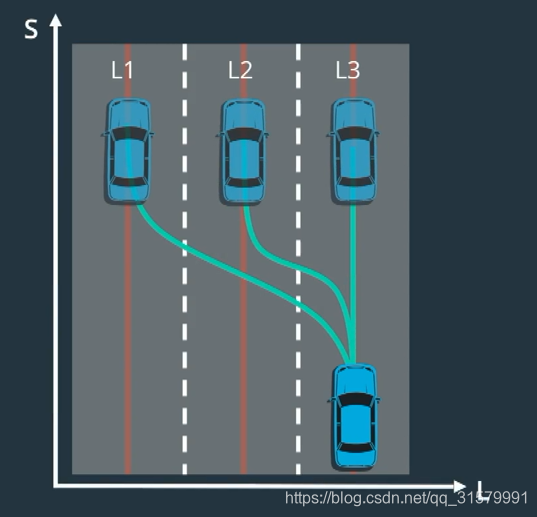
Lattice轨迹生成:
通过匹配S坐标系生成轨迹