系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!
本文先对规划-路径跟踪path following做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、功能
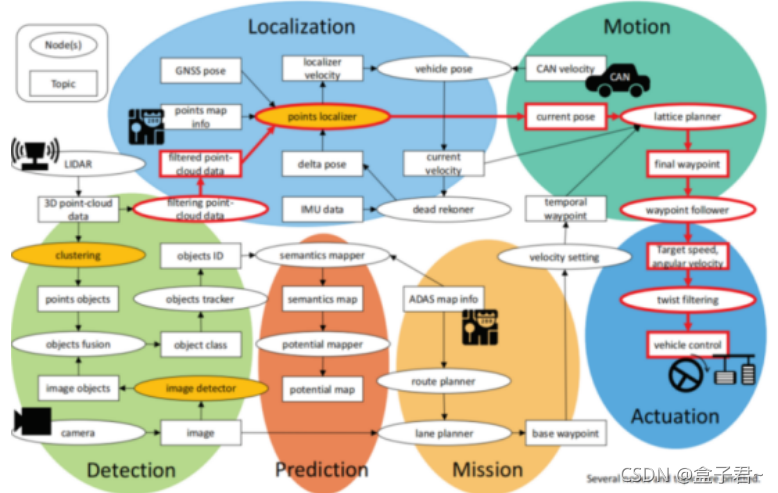
车辆跟踪运动规划motion planning输出的可执行轨迹final_waypoint
.
.
二、输入
【final waypoint】
无人车执行的最终轨迹
.
.
三、输出
【twist_command】
最终的线速度target speed、角速度angular speed
.
.
四、算法流程实现
【waypoint following】
常用的是PID算法、纯跟踪pure_persuit算法了、模型预测控制MPC算法、LQR算法,这个模块实现了 Pure Pursuit算法来实现轨迹跟踪,可以产生一系列的控制指令来移动车辆,这个模块发出的控制消息可以被车辆控制模块订阅,或者被线控接口订阅,最终就可以实现车辆自动控制
相关一系列算法我写在了其他博客,转战一下:
【control】pure pursuit纯追踪算法
【无人驾驶路径跟踪控制】无人驾驶路径跟踪控制常用方法
【control】特定场景PID路径巡线控制器