系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!
本文先对**【无人驾驶autoware 项目实战】高精度点云地图建立、ADAS矢量语义地图建立**做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
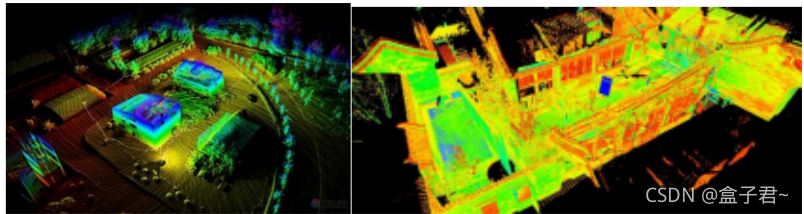
一、三维高精度点云地图建立
1.功能
通过在每次扫描时注册3D点云数据,创建并更新3D地图。这通常被称为SLAM,【防盗标记–盒子君hzj】基于实时定位与建图(SLAM)技术,把道路上的路标、障碍物等信息数字化,精确的描绘出来
.
2.输入
传感器点云数据(点云数据可以来自深度相机、激光雷达、毫米波雷达),使用SLAM内的定位或者输入外部的定位模块数据(外部定位数据可以是GPS/GNSS定位数据)
.
3.输出
3D 点云地图数据(3d map data)
高精度地图的输出格式是怎样的?
https://github.com/ApolloAuto/apollo/blob/master/modules/map/data/README.md
参考README 所示,xml, bin, txt, lb1 都是不同的文件格式,适配不同的读取器,内容是一致的
.
4.算法流程实现
使用三维激光雷达建图算法、视觉建图算法
具体可以参考我的地图mapping专栏,这里列几个相关我的博客
【地图mapping】三维全局地图的开源方案及对比–NDT、LOAM、LIO-SAM、ALOAM、FLOAM、Lego_loam、SC-Lego-LOAM…
【地图mapping】视觉全局地图的开源方案及对比–rgbdslam、ORB_SLAM、RTAB SLAM
【地图mapping】(4.1)构建特征点云地图–2D激光雷达地图构建介绍(简单综述)
【地图mapping】(4.2)构建特征点云地图–3D激光雷达地图构建介绍
【地图mapping 】(4.3)构建特征点云地图–视觉SLAM介绍
.
.
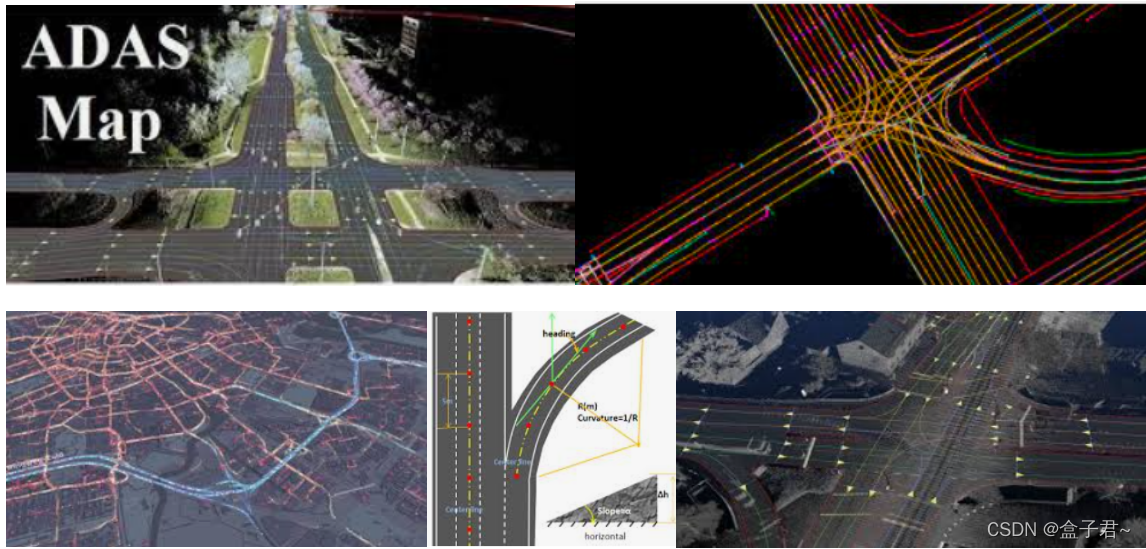
二、ADAS矢量地图建立
1.功能
根据高精度点云地图,图像地图,人工绘制的语义地图(一般由公司专门去做的,相当于给定了.csv文件的航线lane、交通灯等等更多的静态地图信息)
协助校验环境位置信息,并对环境信息进行多方面的补充 ,包括路线route、车道线lane、路径点waypoints等等
2.工具及小型矢量地图建立方法
一般都是找地图公司合作获取的,毕竟信息数据采集和优化、鼠标绘制地图还是很耗费人力物力的,像深度学习图像训练集标注一样。自己搞的话autoware比赛由相关的软件绘制
参考我另外一篇博客
https://blog.csdn.net/qq_35635374/article/details/120920983