系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对**【无人驾驶autoware 项目实战】传感器数据获取、数据采集方案**做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、获取传感器点云(Point cloud)数据
直接通过传感器驱动获取话题数据即可
Velodyne激光雷达传感器、Ibeo激光雷达传感器、Hokuyo激光雷达传感器、【防盗标记–盒子君hzj】毫米波雷达和惯性测量装置通常是自动飞行器的首选
摄像机和激光雷达传感器通常在10到100赫兹的频率下运行,每个任务自动驾驶必须在一定条件下进行时间限制
点云库(PCL)是主要用于管理激光雷达扫描和三维地图数据
.
.
二、获取图像(image)数据
直接通过传感器驱动获取话题数据即可
全方位覆盖360度视野,用来检测运动物体,用来检测运动物体识别红绿灯
.
.
三、获取惯导系统(IMU)数据
直接通过传感器驱动获取话题数据即可
.
.
四、获取定位系统(GNSS)数据
直接通过传感器驱动获取话题数据即可
定位系统gnss传感器接收来自卫星的全球定位信息,通常与陀螺IMU传感器和里程表相结合,以确定位置信息。
定位系统(GNSS)数据在定位模块,有一个功能包gnss_localizer
fix2tfpose包含于gnss_localizer功能包中,通过转换GNSS接收器发来的NEMA消息得到位置消息,后面还要自己实现还有就是全局和局部坐标系的转换。转换GNSS接收器发来的NEMA消息到位置信息(x,y,z,roll,pitch,yaw)。结果可以被单独使用为车辆当前位置,也可以作为lidar_localizar的初始参考位置
.
.
五、获取全局三维点云地图数据、ADAS矢量语义地图数据
全局三维点云地图数据直接读取.pcd文件(内存真的很大),挥着通过map_server功能包读取二维地图
ADAS矢量语义地图直接读取.csv文件
根据高精度点云地图,图像地图,人工绘制的语义地图(一般由公司专门去做的,相当于给定了.csv文件的航线lane、交通灯等等更多的静态地图信息)
.csv文件可以看看我另外的博客
【地图】地图矢量化–生成矢量化地图的方法
.
.
六、数据采集的方案示例
(1)低成本移动激光测量进行数据采集的方案(适合自己做小型实验)
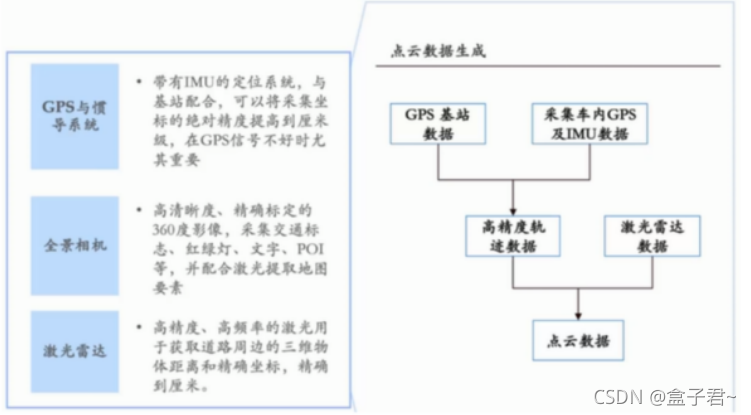
在小车等移动载体上采集得到激光雷达高精度点云数据、甚至是相机数据、GPS/IMU航迹里程计数据
.
.
(2)一体化高精度地图SLAM的解决方案(适合公司运维)

.
.