系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!
本文先对感知-目标预测模块做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、功能
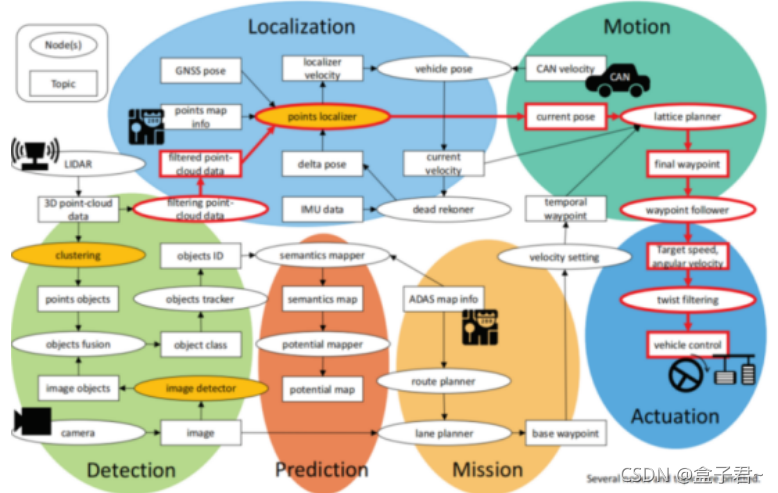
自动驾驶汽车的安全是一个高度优先的问题。因此,感知模块必须计算出“自我”飞行器在三维空间中的准确位置映射,并识别周围场景中的对象作为交通信号灯的状态。预测模块使用定位和检测的结果来预测跟踪目标。通过卡尔曼滤波算法和3D高精度地图实现,基于概率机器人技术和基于规则的系统,部分还使用深度神经网络
基于高精度模块、三维目标检测、追踪模块的信息,预判出附近车体的未来轨迹,使规划模块规划出更实时、安全的路径

.
.
二、输入
【objects ID】
要跟踪的目标类别ID
.
【ADAS 矢量地图】
根据高精度点云地图,图像地图,人工绘制的语义地图(一般由公司专门去做的,相当于给定了.csv文件的航线lane、交通灯等等更多的静态地图信息)
.
.
三、输出
【semantics map】
语义学地图
.
【potential map】
潜在预测动作地图
.
.
四、算法流程实现
【semantics mapper】
语义学地图生成,这个地图表明目标当前动作的含义,例如车辆打转向灯就表明车辆下一步即将想转向
.
【potential mapper】
潜在预测动作地图,这个地图表明了目标下一步动作的置信度
.
【moving_predictor】
使用目标跟踪的结果来预测临近物体的未来行动轨迹,例如汽车或者行人
.
【collision_predictor 】
使用moving_predictor的结果来进一步预测未来是否会与跟踪目标发生碰撞【防盗标记–盒子君hzj】。输入的信息包括车辆的跟踪轨迹,车辆的速度信息和目标跟踪信息