声明:本篇博客内容主要是由邱强博士的运动规划视频整理而成。非原创,只为了一时复习之方便,侵权必删!
最近的学习顺序不对,至少要把机器人的的动力学部分完成,再来做运动规划的学习,这样搞得我的节奏有点不舒服。但是已经花了这么多时间,还是要记录一下。在今后的学习当中要尽量把运动规划的知识体系补全。
可以看看自己之前相关的博客:
Vrep 中RRT算法( path planning) - CSDN博客
0.总体知识框架:

1.0 什么是机器人的运动规划
定义:在给定的环境中,指定机器人的起点与终点,计算出连接起点与终点,并满足一定的约束条件(如避障、路径最短、时间最短、末端满足工艺要求等)的轨迹。
简单的说可以理解为:在机械臂上做自动规划。
1.1 运动规划算法的评价标准
- Complete(完备性):如果一个问题有解,那么一定能在有限的时间内求出可行解。
- Optimality(最有性):找到的路径是最短的,能量最优的,执行最快的等等。
1.2 理论现状与应用现状
- 理论现状:
从运动学规划角度,给定足够多的时间,一定能够最优且完备地求解到轨迹。从理论的角度,运动规划的问题已经解决 了。
- 应用现状:
目前不存在一种能在给定的时间内,给出不错路径的算法。
2. 为什么要进行运动规划
哪有那么多为什么,狂拽酷炫吊炸天就行了!!!
好吧,正经点!提高易用性,如果有一天机器人使用起来像手机一样好用,那么机器人就能走进千家万户,哪怕只到了诺基亚的程度。
3. 怎么进行运动规划
对运动规划问题进行数学建模。将问题用数学语言描述出来,然后求解。
建模方法主要有三种:
3.1 建模篇优化方法

3.2 建模篇强化学习方法

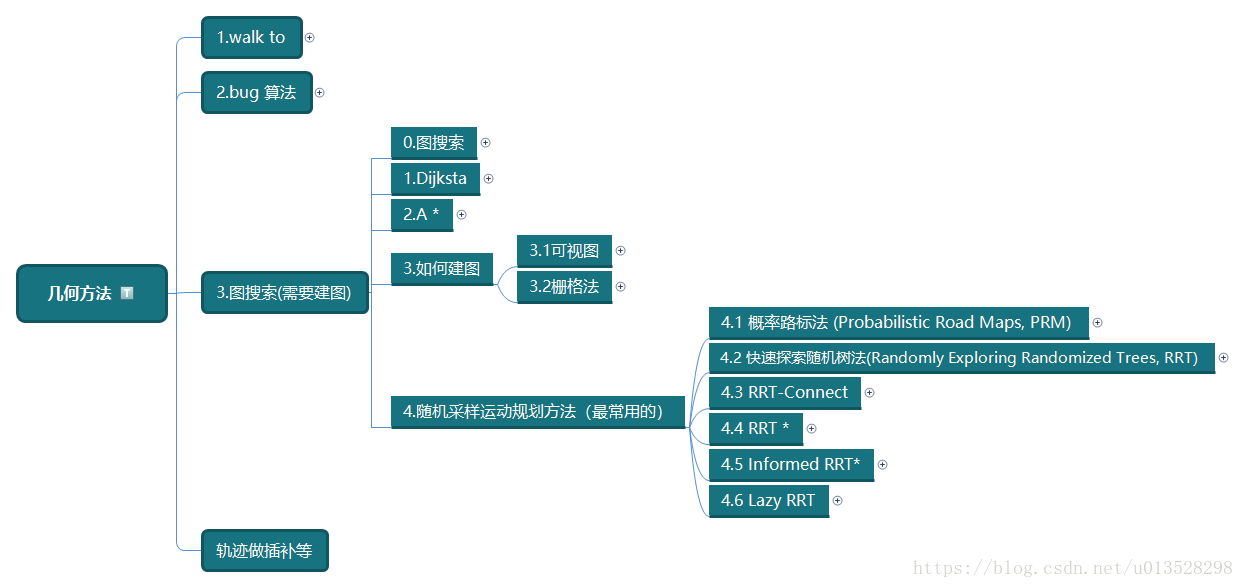
3.3 建模篇几何方法
这些方法的具体过程在今后的学习当中再慢慢补充,不过其中最重要的应该是RRT算法,今后的学习当中,多花点时间学习一下RRT算法,及其衍生的算法。
4. 实际四要素
机器人是有体积有大小的,在实际的运动规划中要考虑以下几个因素。
