Autoware planning模块学习笔记(二):路径规划(2)- 节点waypoint_replanner(上)
前面一篇博客Autoware planning模块学习笔记(二):路径规划(1),介绍了“勾选waypoint_loader”这一操作时所启动的waypoint_loader节点,还剩下waypoint_replanner和waypoint_marker_publisher两个节点。这里帮大伙儿逐行分析节点waypoint_replanner的代码。
节点waypoint_replanner
节点waypoint_replanner的源文件是nodes/waypoint_replanner/waypoint_replanner.cpp和nodes/waypoint_replanner/waypoint_replanner_node.cpp
老规矩,先找到main函数。main函数在waypoint_replanner_node.cpp中,main函数中就做了一件事,新建waypoint_maker::WaypointReplannerNode对象wr,很容易就能猜测到waypoint_maker::WaypointReplannerNode的构造函数内执行了一些操作。
int main(int argc, char** argv)
{
ros::init(argc, argv, "waypoint_replanner");
waypoint_maker::WaypointReplannerNode wr;
ros::spin();
return 0;
}
接着我们查看waypoint_maker::WaypointReplannerNode的构造函数,可以发现replanning_mode_的初始值为false,构造函数内实现了topic的订阅和发布。其中订阅的“/based/lane_waypoints_raw”就是前面waypoint_loader节点所发布的消息。
WaypointReplannerNode::WaypointReplannerNode() : replanning_mode_(false)
{
lane_pub_["with_decision"] = nh_.advertise<autoware_msgs::LaneArray>("/based/lane_waypoints_array", 10, true);
lane_pub_["without_decision"] = nh_.advertise<autoware_msgs::LaneArray>("/lane_waypoints_array", 10, true);
lane_sub_ = nh_.subscribe("/based/lane_waypoints_raw", 1, &WaypointReplannerNode::laneCallback, this);
config_sub_ = nh_.subscribe("/config/waypoint_replanner", 1, &WaypointReplannerNode::configCallback, this);
}
紧接着分析构造函数内的两个回调函数laneCallback和configCallback,首先看回调函数configCallback,要注意的是subscribe的回调函数是接收到对应消息后才会被调用,因此在代码中的前后设定顺序跟实际执行顺序不是一样的,实际执行顺序是按照各自消息到达顺序确定,因此可以认为是随机的。我们先分析configCallback函数是因为有些参数需要通过它进行设置,如果参数未设置完毕,laneCallback函数被激发执行了呢?所以实际启动系统过程中(如下图),是在操作交互界面上设置相关参数完成后再勾选相关选项,再等一会全部初始化完成后切换至自动驾驶模式。

对应于topic "/config/waypoint_replanner"的回调函数configCallback,首先设置成员变量replanning_mode_和realtime_tuning_mode_,接着对replanner_进行初始化,replanner_的定义是“WaypointReplanner replanner_;”。接着(防盗标记:zhengkunxian)根据lane_array_.lanes(lane_array_定义为autoware_msgs::LaneArray lane_array_;)是否为空(lane_array_在另一个回调函数laneCallback中会被赋值)和realtime_tuning_mode_变量决定是否执行publishLaneArray函数。
void WaypointReplannerNode::configCallback(const autoware_config_msgs::ConfigWaypointReplanner::ConstPtr& conf)
{
replanning_mode_ = conf->replanning_mode;
realtime_tuning_mode_ = conf->realtime_tuning_mode;
replanner_.initParameter(conf);
if (lane_array_.lanes.empty() || !realtime_tuning_mode_)
{
return;
}
publishLaneArray();
}
replanner_的参数初始化:
void WaypointReplanner::initParameter(const autoware_config_msgs::ConfigWaypointReplanner::ConstPtr& conf)
{
velocity_max_ = kmph2mps(conf->velocity_max);
velocity_min_ = kmph2mps(conf->velocity_min);
accel_limit_ = conf->accel_limit;
decel_limit_ = conf->decel_limit;
r_th_ = conf->radius_thresh;
r_min_ = conf->radius_min;
lookup_crv_width_ = 5;
resample_mode_ = conf->resample_mode;
resample_interval_ = conf->resample_interval;
replan_curve_mode_ = conf->replan_curve_mode;
replan_endpoint_mode_ = conf->replan_endpoint_mode;
overwrite_vmax_mode_ = conf->overwrite_vmax_mode;
velocity_offset_ = conf->velocity_offset;
end_point_offset_ = conf->end_point_offset;
braking_distance_ = conf->braking_distance;
r_inf_ = 10 * r_th_;
vel_param_ = calcVelParam(velocity_max_);
}
publishLaneArray函数内如果replanning_mode_为true,则调用replan函数重规划。
void WaypointReplannerNode::publishLaneArray()
{
autoware_msgs::LaneArray array(lane_array_);
if (replanning_mode_)
{
replan(array);
}
lane_pub_["with_decision"].publish(array);
if (withoutDecisionMaker())
{
lane_pub_["without_decision"].publish(array);
}
}
replan函数内遍历lane_array.lanes,这里回顾一下lane_array.lanes内的元素都是autoware_msgs::Lane类型,其中储存了从multi_lane_csv_文件内读取的路径点集合(std::vector<autoware_msgs::Waypoint>),每个路径点记录了UWB坐标系下的坐标x,y,z以及航向角等必要信息供规划所用。对每一条lane,replanner_都调用replanLaneWaypointVel函数。
void WaypointReplannerNode::replan(autoware_msgs::LaneArray& lane_array)
{
for (auto &el : lane_array.lanes)
{
replanner_.replanLaneWaypointVel(el);
}
}
replanLaneWaypointVel函数:
void WaypointReplanner::replanLaneWaypointVel(autoware_msgs::Lane& lane)
{
if (lane.waypoints.empty())
{
return;
}
const int dir = getDirection(lane);
const unsigned long last = lane.waypoints.size() - 1;
changeVelSign(lane, true);
limitVelocityByRange(0, last, 0, velocity_max_, lane);
if (resample_mode_)
{
resampleLaneWaypoint(resample_interval_, lane, dir);
}
if (replan_curve_mode_)
{
std::vector<double> curve_radius;
KeyVal curve_list;
createRadiusList(lane, curve_radius);
createCurveList(curve_radius, curve_list);
if (overwrite_vmax_mode_)
{// set velocity_max for all_point
setVelocityByRange(0, last, 0, velocity_max_, lane);
}
// set velocity by curve(防盗标记:zhengkunxian)
for (const auto& el : curve_list)
{
const double& radius = el.second.second;
double vmin = velocity_max_ - vel_param_ * (r_th_ - radius);
vmin = (vmin < velocity_min_) ? velocity_min_ : vmin;
limitVelocityByRange(el.first, el.second.first, velocity_offset_, vmin, lane);
}
}
// set velocity on start & end of lane
if (replan_endpoint_mode_)
{
const unsigned long zerospeed_start = last - end_point_offset_;
const unsigned long lowspeed_start = zerospeed_start - braking_distance_;
raiseVelocityByRange(0, last, 0, velocity_min_, lane);
limitVelocityByRange(0, 0, 0, velocity_min_, lane);
limitVelocityByRange(lowspeed_start, last, 0, velocity_min_, lane);
setVelocityByRange(zerospeed_start, last, 0, 0.0, lane);
}
if (dir < 0)
{
changeVelSign(lane, false);
}
}
getDirection函数:
calcRelativeCoordinate函数(防盗标记:zhengkunxian)位于src/autoware/common/waypoint_follower/lib/libwaypoint_follower.cpp,libwaypoint_follower.cpp被src/autoware/core_planning/waypoint_maker/nodes/waypoint_replanner/waypoint_replanner.h所引用。
int WaypointReplanner::getDirection(const autoware_msgs::Lane& lane) const
{
if (lane.waypoints.size() < 2)
{
return 1;
}
const geometry_msgs::Pose& pose = lane.waypoints[0].pose.pose;
const geometry_msgs::Point& point = lane.waypoints[1].pose.pose.position;
const geometry_msgs::Point rlt_point(calcRelativeCoordinate(point, pose));
return rlt_point.x < 0 ? -1 : 1;
}
calcRelativeCoordinate函数:
作用:计算全局坐标系中某点相对于机器人坐标系中的位置,即传入函数的point(全局坐标系下的坐标)相对于pose坐标系的位置。具体含义可见下面示意图,calcRelativeCoordinate函数返回的便是P点在车体坐标系O’x’y’中的坐标(x’, y’)。

实现:下面是Autoware的代码实现,调用了TF的一些函数进行处理。但是具体的内部机理,涉及到TF库的一些原理,坐标系的转换,四元数之类的,超出了博主的能力范围,也许以后有精力会去研究一下TF的一些原理,这里就直接用Autoware这个函数就好了。
// calculation relative coordinate of point from current_pose frame
geometry_msgs::Point calcRelativeCoordinate(geometry_msgs::Point point_msg, geometry_msgs::Pose current_pose)
{
tf::Transform inverse;
tf::poseMsgToTF(current_pose, inverse);
tf::Transform transform = inverse.inverse();
tf::Point p;
pointMsgToTF(point_msg, p);
tf::Point tf_p = transform * p;
geometry_msgs::Point tf_point_msg;
pointTFToMsg(tf_p, tf_point_msg);
return tf_point_msg;
}
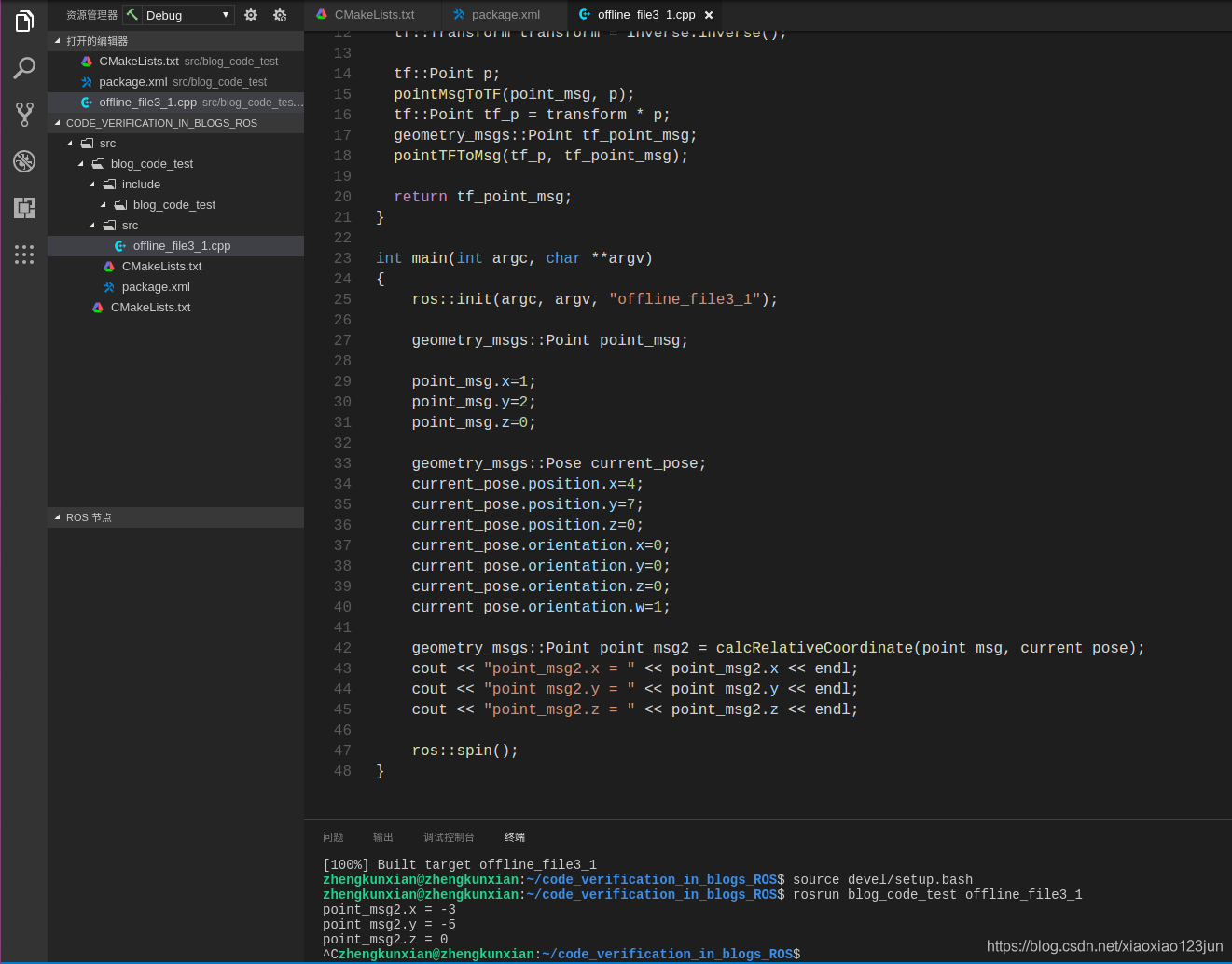
作用验证:我们设计一个小实验,验证一下calcRelativeCoordinate函数的作用,其中current_pose所对应的坐标系(也就是这个刚体对应的位置与方向,其中方向是用四元数表示的),其与世界坐标系之间的x,y,z轴方向是一致的,(防盗标记:zhengkunxian)只是其原点位于世界坐标系(4,7,0)处,很容易的我们知道point_msg(1,2,0)在current_pose所对应的坐标系中的坐标为(-3,-5,0),而代码运行结果与我们的计算相符,因此得证代码的作用。

再回到getDirection函数,其根据返回的P点在车体坐标系O’x’y’中的坐标的x坐标,如果其小于0则返回-1,否则返回1。实际上getDirection函数内只分析了传入的lane中记录的lane.waypoints[0]所在坐标系和lane.waypoints[1]坐标点之间的关系。
再回到调用getDirection函数的replanLaneWaypointVel函数,接着分析changeVelSign函数的作用:顾名思义,改变路径点的速度符号。
void WaypointReplanner::changeVelSign(autoware_msgs::Lane& lane, bool positive) const
{
const int sgn = positive ? 1 : -1;
for (auto& el : lane.waypoints)
{
el.twist.twist.linear.x = sgn * fabs(el.twist.twist.linear.x);
}
}
接着replanLaneWaypointVel函数继续执行,调用limitVelocityByRange函数:
limitVelocityByRange(0, last, 0, velocity_max_, lane);
其中last:const unsigned long last = lane.waypoints.size() - 1;
velocity_max_:velocity_max_ = kmph2mps(conf->velocity_max);
首先判断lane中储存的路径点是否为空,若不为空则接着判断offset(偏移)是否大于0,如果大于0则进一步对start_idx和end_idx进行处理。这里replanLaneWaypointVel函数调用时因为传入的offset=0,因此跳过。接着为了防止下标越界对end_idx进行检查。检查完毕后对lane中所有路径点的速度进行最大值的限制。
void WaypointReplanner::limitVelocityByRange(unsigned long start_idx, unsigned long end_idx, unsigned int offset,
double vmin, autoware_msgs::Lane& lane)
{
if (lane.waypoints.empty())
{
return;
}
if (offset > 0)
{
start_idx = (start_idx > offset) ? (start_idx - offset) : 0;
end_idx = (end_idx > offset) ? (end_idx - offset) : 0;
}
end_idx = (end_idx >= lane.waypoints.size()) ? lane.waypoints.size() - 1 : end_idx;
for (unsigned long idx = start_idx; idx <= end_idx; idx++)
{
if (lane.waypoints[idx].twist.twist.linear.x < vmin)
{
continue;
}
lane.waypoints[idx].twist.twist.linear.x = vmin;
}
limitAccelDecel(start_idx, lane);
limitAccelDecel(end_idx, lane);
}
limitAccelDecel函数:
根据下式(高一物理哦~其实博主高中时候物理超强的,但是现在基本忘光了)对lane中所存储的下一路径点的速度进行修正
其中 是最大加速度, 是距离(根据前后两个路径点的位置算得)。由此可以计算出在最大加速度的限制条件下,下一路径点的速度最大值/最小值,据此进行修正。
void WaypointReplanner::limitAccelDecel(const unsigned long idx, autoware_msgs::Lane& lane)
{
const double acc[2] = { accel_limit_, decel_limit_ };
const unsigned long end_idx[2] = { lane.waypoints.size() - idx, idx + 1 };
const int sgn[2] = { 1, -1 };
for (int j = 0; j < 2; j++) // [j=0]: accel_limit_process, [j=1]: decel_limit_process
{
double v = lane.waypoints[idx].twist.twist.linear.x;//v保持不变
unsigned long next = idx + sgn[j];//[j=0]: next = idx + 1, [j=1]: next = idx - 1
for (unsigned long i = 1; i < end_idx[j]; i++, next += sgn[j])//[j=0]: end_idx[j] = lane.waypoints.size() - idx, [j=1]: end_idx[j] = idx + 1
{
const geometry_msgs::Point& p0 = lane.waypoints[next - sgn[j]].pose.pose.position;
const geometry_msgs::Point& p1 = lane.waypoints[next].pose.pose.position;
const double dist = std::hypot(p0.x - p1.x, p0.y - p1.y);//计算距离
v = sqrt(2 * acc[j] * dist + v * v);
if (v > velocity_max_ || v > lane.waypoints[next].twist.twist.linear.x)
{
break;
}
lane.waypoints[next].twist.twist.linear.x = v;
}
}
}
再次回到replanLaneWaypointVel函数(博主把下一步代码贴出来,后面也这样,为大家节省往回翻的精力):
根据设置的resample_mode_决定是否执行resampleLaneWaypoint函数。我们不管在Autoware交互界面是怎么设置的,所有的函数都会被分析讲解。
if (resample_mode_)
{
resampleLaneWaypoint(resample_interval_, lane, dir);
}
resampleLaneWaypoint函数:
顾名思义,这个函数的作用是重新采样路径点。
void WaypointReplanner::resampleLaneWaypoint(const double resample_interval, autoware_msgs::Lane& lane, int dir)
{
if (lane.waypoints.size() < 2)
{
return;
}
autoware_msgs::Lane original_lane(lane);
lane.waypoints.clear();
lane.waypoints.emplace_back(original_lane.waypoints[0]);
lane.waypoints.reserve(ceil(1.5 * calcPathLength(original_lane) / resample_interval_));
//reserve函数尝试为向量保留足够的内存以容纳指定数量的元素。
//ceil(x)函数返回的是大于x的最小整数,例如ceil(10.5) == 11,ceil(-10.5) ==-10
//calcPathLength函数计算original_lane中路径点之间总的距离,也就是整条轨迹的长度
for (unsigned long i = 1; i < original_lane.waypoints.size(); i++)
{
CbufGPoint curve_point = getCrvPointsOnResample(lane, original_lane, i);//采三个轨迹点
const std::vector<double> curve_param = calcCurveParam(curve_point);//根据三个轨迹点求轨迹曲线的圆心和半径
lane.waypoints.back().twist.twist = original_lane.waypoints[i - 1].twist.twist;
lane.waypoints.back().wpstate = original_lane.waypoints[i - 1].wpstate;
lane.waypoints.back().change_flag = original_lane.waypoints[i - 1].change_flag;
// if going straight
if (curve_param.empty())
{
resampleOnStraight(curve_point, lane);//如果三点确定的轨迹是直线
}
// else if turnning curve
else
{
resampleOnCurve(curve_point[1], curve_param, lane, dir);//如果三点确定的轨迹是曲线
}
}
lane.waypoints[0].pose.pose.orientation = lane.waypoints[1].pose.pose.orientation;
lane.waypoints.back().twist.twist = original_lane.waypoints.back().twist.twist;
lane.waypoints.back().wpstate = original_lane.waypoints.back().wpstate;
lane.waypoints.back().change_flag = original_lane.waypoints.back().change_flag;
}
对getCrvPointsOnResample采三个轨迹点 , 和 进行分析:
const CbufGPoint WaypointReplanner::getCrvPointsOnResample(
const autoware_msgs::Lane& lane, const autoware_msgs::Lane& original_lane, unsigned long original_index) const
{
unsigned long id = original_index;
CbufGPoint curve_point(3);
const unsigned int n = (lookup_crv_width_ - 1) / 2;//lookup_crv_width_此处被定义为5
const autoware_msgs::Waypoint cp[3] = {
(lane.waypoints.size() < n) ? lane.waypoints.front() : lane.waypoints[lane.waypoints.size() - n],
original_lane.waypoints[id],
(id < original_lane.waypoints.size() - n) ? original_lane.waypoints[id + n] : original_lane.waypoints.back()
};
for (int i = 0; i < 3; i++)
{
curve_point.push_back(cp[i].pose.pose.position);
}
return curve_point;
}
其中lookup_crv_width_此处被赋值为5,因此n=2。我们不妨进行假设,original_lane.waypoints.size()=5。因为lane.waypoints.clear()之后lane.waypoints.emplace_back(original_lane.waypoints[0]),可知lane在进入for循环被传入getCrvPointsOnResample函数时初始lane.waypoints.size()=1。每次for循环一次,会调用resampleOnStraight或者resampleOnCurve函数,往lane里面填入新的路径点,因此每次for循环结束自然而然lane.waypoints.size()++。基于上面的假设以及已知条件,我们开始进行分析。

calcCurveParam函数根据采样的三个点
,
和
首先计算:
由上面各式进一步计算得到曲线中心点和曲率:
上面各式的原理是什么呢?上面的公式都是合并整理过的,我们看函数名猜测是用来根据圆上三点求圆心和半径的,而且最后一个求曲率的公式也确实是计算圆心到其中某一点的距离。“根据圆上三点求圆心和半径”这一问题有多种解法,主流的有两种:(1)分别通过其中两点的中垂线交点求圆心;(2)通过三个点到圆心距离相等联立方程求解。这两种方法的具体编程大家可以看圆上三点求圆心和半径,博主在这里就对第一种方法所得的公式与Autoware中的WaypointReplanner::calcCurveParam函数所使用的公式的最终结果进行对比,验证见下图,验证代码我也附上了,注意编译的时候要指明g++ -std=c++11,由此验证了WaypointReplanner::calcCurveParam函数确实是用来根据圆上三点求圆心和半径的,至于它的公式究竟是根据原理1整理而来,还是由原理2演化而来,都已经不重要了,这两个原理的求解公式必定是能合并整理成跟WaypointReplanner::calcCurveParam函数所使用的公式一样的(因为结果是一致的)。
const std::vector<double> WaypointReplanner::calcCurveParam(CbufGPoint p) const
{
for (int i = 0; i < 3; i++, p.push_back(p.front())) // if exception occured, change points order
{
const double d = 2 * ((p[0].y - p[2].y) * (p[0].x - p[1].x) - (p[0].y - p[1].y) * (p[0].x - p[2].x));
if (fabs(d) < 1e-8)
{
continue;
}
const std::vector<double> x2 = { p[0].x * p[0].x, p[1].x * p[1].x, p[2].x * p[2].x };
const std::vector<double> y2 = { p[0].y * p[0].y, p[1].y * p[1].y, p[2].y * p[2].y };
const double a = y2[0] - y2[1] + x2[0] - x2[1];
const double b = y2[0] - y2[2] + x2[0] - x2[2];
std::vector<double> param(3);
const double cx = param[0] = ((p[0].y - p[2].y) * a - (p[0].y - p[1].y) * b) / d;
const double cy = param[1] = ((p[0].x - p[2].x) * a - (p[0].x - p[1].x) * b) / -d;
param[2] = sqrt((cx - p[0].x) * (cx - p[0].x) + (cy - p[0].y) * (cy - p[0].y));
return param;
}
return std::vector<double>(); // error
}
验证代码:
#include <string>
#include <vector>
#include <algorithm>
#include <math.h>
#include <iostream>
using namespace std;
class Point2f{
public:
double x,y,z;
public:
Point2f(double X=0,double Y=0,double Z=0){
this->x=X,this->y=Y,this->z=Z;
}
~Point2f(){}
};
struct CircleData
{
Point2f center;
double radius;
};
int main()
{
//随便定义三个点
Point2f pt1, pt2, pt3;
pt1.x = 150;
pt1.y = 150;
pt2.x = 200;
pt2.y = 200;
pt3.x = 250;
pt3.y = 100;
//定义两个点,分别表示两个中点
Point2f midpt1, midpt2;
//求出点1和点2的中点
midpt1.x = (pt2.x + pt1.x) / 2;
midpt1.y = (pt2.y + pt1.y) / 2;
//求出点3和点1的中点
midpt2.x = (pt3.x + pt1.x) / 2;
midpt2.y = (pt3.y + pt1.y) / 2;
//求出分别与直线pt1pt2,pt1pt3垂直的直线的斜率
double k1 = -(pt2.x - pt1.x) / (pt2.y - pt1.y);
double k2 = -(pt3.x - pt1.x) / (pt3.y - pt1.y);
//然后求出过中点midpt1,斜率为k1的直线方程(既pt1pt2的中垂线):y - midPt1.y = k1( x - midPt1.x)
//以及过中点midpt2,斜率为k2的直线方程(既pt1pt3的中垂线):y - midPt2.y = k2( x - midPt2.x)
//定义一个圆的数据的结构体对象CD
CircleData CD;
//连立两条中垂线方程求解交点得到:
CD.center.x = (midpt2.y - midpt1.y - k2* midpt2.x + k1*midpt1.x) / (k1 - k2);
CD.center.y = midpt1.y + k1*(midpt2.y - midpt1.y - k2*midpt2.x + k2*midpt1.x) / (k1 - k2);
//用圆心和其中一个点求距离得到半径:
CD.radius = sqrt((CD.center.x - pt1.x)*(CD.center.x - pt1.x) + (CD.center.y - pt1.y)*(CD.center.y - pt1.y));
cout << "CD.center.x = " << CD.center.x << endl;
cout << "CD.center.y = " << CD.center.y << endl;
cout << "CD.radius = " << CD.radius << endl;
//随便定义三个点
Point2f p0, p1, p2;
p0.x = 150;
p0.y = 150;
p1.x = 200;
p1.y = 200;
p2.x = 250;
p2.y = 100;
const double d = 2 * ((p0.y - p2.y) * (p0.x - p1.x) - (p0.y - p1.y) * (p0.x - p2.x));
const std::vector<double> x2 = { p0.x * p0.x, p1.x * p1.x, p2.x * p2.x };
const std::vector<double> y2 = { p0.y * p0.y, p1.y * p1.y, p2.y * p2.y };
const double a = y2[0] - y2[1] + x2[0] - x2[1];
const double b = y2[0] - y2[2] + x2[0] - x2[2];
std::vector<double> param(3);
const double cx = ((p0.y - p2.y) * a - (p0.y - p1.y) * b) / d;
const double cy = ((p0.x - p2.x) * a - (p0.x - p1.x) * b) / -d;
const double r = sqrt((cx - p0.x) * (cx - p0.x) + (cy - p0.y) * (cy - p0.y));
cout << "cx = " << cx << endl;
cout << "cy = " << cy << endl;
cout << "r = " << r << endl;
return 0;
}
验证结果:
 resampleOnStraight函数:
resampleOnStraight函数:
void WaypointReplanner::resampleOnStraight(const CbufGPoint& curve_point, autoware_msgs::Lane& lane)
{
if (curve_point.size() != 3)
{
return;
}
autoware_msgs::Waypoint wp(lane.waypoints.back());
const geometry_msgs::Point& pt = wp.pose.pose.position;
const double yaw = atan2(curve_point[2].y - curve_point[0].y, curve_point[2].x - curve_point[0].x);
wp.pose.pose.orientation = tf::createQuaternionMsgFromYaw(yaw);
//向量nvec由目标点和新lane的最后一个轨迹点确定
const std::vector<double> nvec = { curve_point[1].x - pt.x, curve_point[1].y - pt.y, curve_point[1].z - pt.z };
double dist = sqrt(nvec[0] * nvec[0] + nvec[1] * nvec[1]);//计算目标轨迹点和lane中最后一个轨迹点之间的距离
std::vector<double> resample_vec = nvec;
const double coeff = resample_interval_ / dist;
for (auto& el : resample_vec)//根据重采样间隔resample_interval_矫正向量resample_vec的模
{
el *= coeff;
}
for (; dist > resample_interval_; dist -= resample_interval_)
{//在lane的最后一个轨迹点的基础上根据向量resample_vec确定下一轨迹点,直到当前轨迹点离目标点的距离不足采样间隔
wp.pose.pose.position.x += resample_vec[0];
wp.pose.pose.position.y += resample_vec[1];
wp.pose.pose.position.z += resample_vec[2];
lane.waypoints.emplace_back(wp);
}
}
resampleOnCurve函数:
void WaypointReplanner::resampleOnCurve(const geometry_msgs::Point& target_point,
const std::vector<double>& curve_param, autoware_msgs::Lane& lane, int dir)
{
if (curve_param.size() != 3)
{
return;
}
autoware_msgs::Waypoint wp(lane.waypoints.back());
const double& cx = curve_param[0];
const double& cy = curve_param[1];
const double& radius = curve_param[2];
const double reverse_angle = (dir < 0) ? M_PI : 0.0;
const geometry_msgs::Point& p0 = wp.pose.pose.position;
const geometry_msgs::Point& p1 = target_point;
double theta = fmod(atan2(p1.y - cy, p1.x - cx) - atan2(p0.y - cy, p0.x - cx), 2 * M_PI);//fmod取余,
//保证atan2(p1.y - cy, p1.x - cx) - atan2(p0.y - cy, p0.x - cx)的值在2 * M_PI范围内
//atan2(p1.y - cy, p1.x - cx) - atan2(p0.y - cy, p0.x - cx)代表本次重采样的起始点和目标点与轨迹曲线圆心之间的夹角
int sgn = (theta > 0.0) ? (1) : (-1);
if (fabs(theta) > M_PI)
{
theta -= 2 * sgn * M_PI;//将theta的取值限定在-M_PI~M_PI
}
sgn = (theta > 0.0) ? (1) : (-1);
// interport
double t = atan2(p0.y - cy, p0.x - cx);
double dist = radius * fabs(theta);//本次重采样的起始点和目标点之间的轨迹的弧长
const double resample_dz = resample_interval_ * (p1.z - p0.z) / dist;//z坐标增长率,
//在WaypointReplanner::resampleOnStraight函数中忘了z坐标的变化
for (; dist > resample_interval_; dist -= resample_interval_)
{
if (lane.waypoints.size() == lane.waypoints.capacity())//这里检查了lane是否已经储存满,然而在
//WaypointReplanner::resampleOnStraight函数中同样重采样轨迹点并存入lane,但是却忘了检查lane是否存满的问题
{
break;
}
t += sgn * resample_interval_ / radius;//resample_interval_ / radius->采样弧长/半径 得到 采样弧度
const double yaw = fmod(t + sgn * M_PI / 2.0, 2 * M_PI) + reverse_angle;
wp.pose.pose.position.x = cx + radius * cos(t);
wp.pose.pose.position.y = cy + radius * sin(t);
wp.pose.pose.position.z += resample_dz;
wp.pose.pose.orientation = tf::createQuaternionMsgFromYaw(yaw);
lane.waypoints.emplace_back(wp);
}
}
篇幅已经挺长的了,本篇就到此为止了。这一篇将节点waypoint_replanner中函数WaypointReplanner::replanLaneWaypointVel(位于src/autoware/core_planning/waypoint_maker/nodes/waypoint_replanner/waypoint_replanner.cpp)所调用的函数WaypointReplanner::resampleLaneWaypoint分析完成。后面一篇博客回到函数WaypointReplanner::replanLaneWaypointVel继续分析。
