全部笔记的汇总贴(视频也有传送门):中科大-凸优化
原问题
min f 0 ( x ) s . t . f i ( x ) ≤ 0 , i = 1 , ⋯ , m h i ( x ) = 0 , i = 1 , ⋯ , P \min f_0(x)\\s.t.\;f_i(x)\le0,i=1,\cdots,m\\h_i(x)=0,i=1,\cdots,P minf0(x)s.t.fi(x)≤0,i=1,⋯,mhi(x)=0,i=1,⋯,P
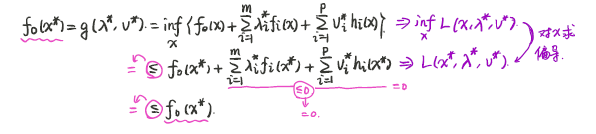
对偶函数 g ( λ , v ) = inf x { f 0 ( x ) + ∑ i = 1 m λ i f i ( x ) + ∑ i = 1 P v i h i ( x ) } g(\lambda,v)=\inf_x\{f_0(x)+\sum_{i=1}^m\lambda_if_i(x)+\sum_{i=1}^Pv_ih_i(x)\} g(λ,v)=xinf{ f0(x)+i=1∑mλifi(x)+i=1∑Pvihi(x)}
对偶问题 max g ( λ , v ) s . t . λ ≥ 0 \max\;g(\lambda,v)\\s.t.\;\lambda\ge0 maxg(λ,v)s.t.λ≥0
假设
- P ∗ = d ∗ P^*=d^* P∗=d∗
- 所有函数可微
x ∗ , λ ∗ , v ∗ f i ( x ∗ ) ≤ 0 , i = 1 , ⋯ , m h i ( x ∗ ) = 0 , i = 1 , ⋯ , P λ ∗ ≥ 0 x^*,\lambda^*,v^*\\f_i(x^*)\le0,i=1,\cdots,m\\h_i(x^*)=0,i=1,\cdots,P\\\lambda^*\ge0 x∗,λ∗,v∗fi(x∗)≤0,i=1,⋯,mhi(x∗)=0,i=1,⋯,Pλ∗≥0
KKT条件
- primal feasibility
- dual feasibility
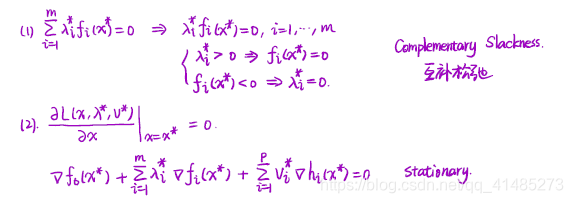
- complementary slackness
- stationary
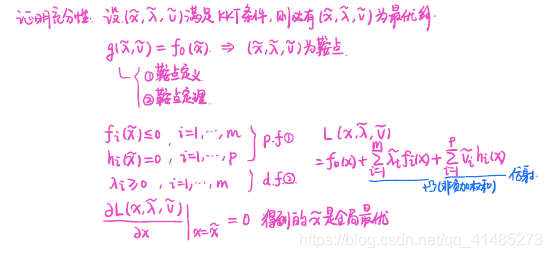
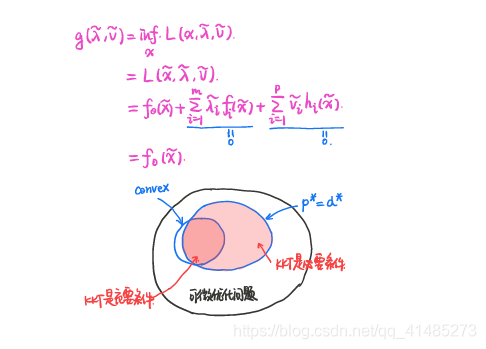
若原问题为凸问题,各个函数可微,对偶间隙为零,则KKT条件为充要条件
下一章传送门:中科大-凸优化 笔记(lec37)-一些问题的KKT条件