第一步到工作目录catkin_ws下载相应的功能包并编译
$ cd ~/catkin_ws/src
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ cd ..
$ rosdep install --from-paths src -i -y $ catkin_make第二步安装TurtleBot3 Simulation
cd ~/catkin_ws/src/git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/catkin_ws && catkin_make
第三步启动gazebo仿真
mkdir -p ~/.gazebo/models/
cp -r ~/catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_XXX ~/.gazebo/models/首先要将模型文件拷贝到gazebo中,上述代码的XXX请填入自己要仿真的模型名称:
burger||waffle接着,设置机器人的型号参数:
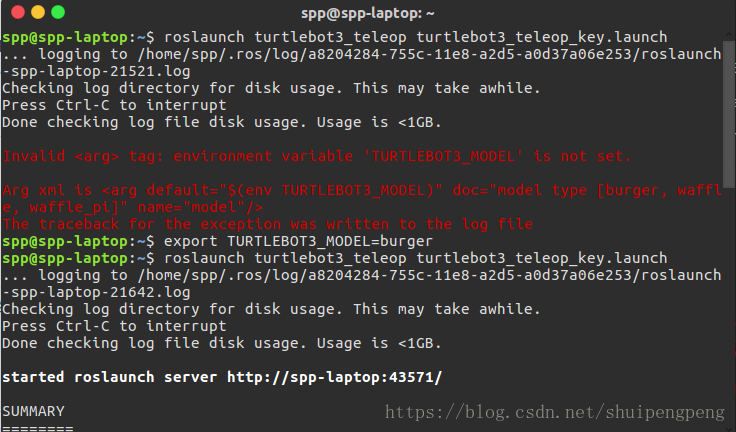
export TURTLEBOT3_MODEL=burger启动的环境可以有几种不同的选择。
2.1 启动空的世界地图
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch 如果出现
扫描二维码关注公众号,回复:
2190946 查看本文章

[turtlebot3_world.launch] is neither a launch file in package [turtlebot3_gazebo] nor is [turtlebot3_gazebo] a launch file name
The traceback for the exception was written to the log file
说明没有source进行下面的步骤
如果出现
Invalid <arg> tag: environment variable 'TURTLEBOT3_MODEL' is not set.
Arg xml is <arg default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]" name="model"/>
The traceback for the exception was written to the log file
则按照下面图片的步骤搞
启动空的世界地图
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch启动复杂地图:
roslaunch turtlebot3_gazebo turtlebot3_world.launch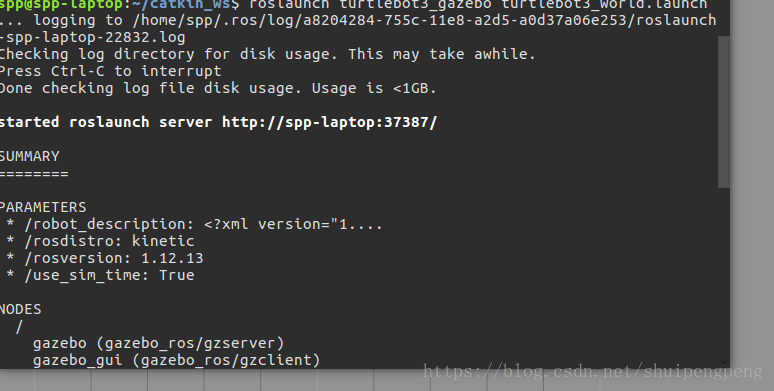
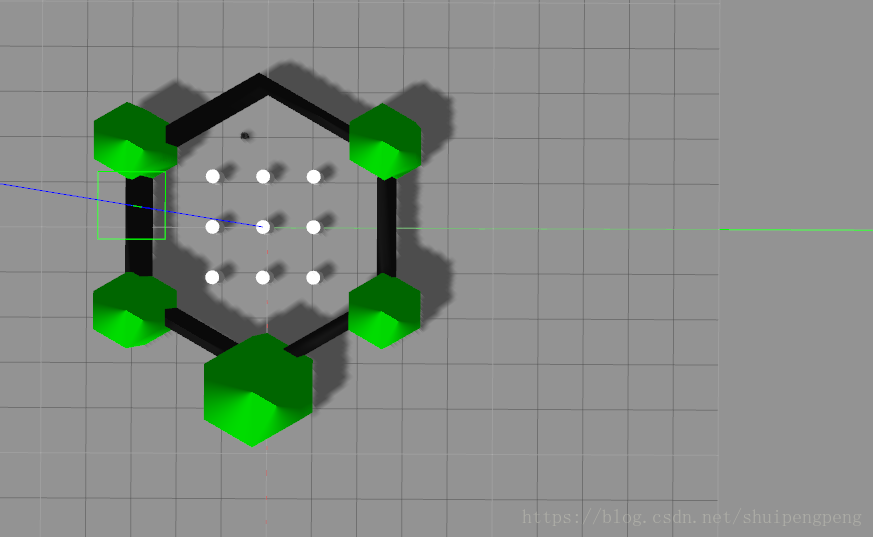
gazebo加载比较慢 我的神船已经压不住他的热量了,开了三个窗口卡成ppt
启动家庭环境地图:
roslaunch turtlebot3_gazebo turtlebot3_house.launch
通过键盘控制turtlebot:
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch在打开的Terminal中通过w/a/d/x控制方向,s来停止移动。