前期准备工作,创工作空间 共享无线 最重要的是地图。
Remote PC
master是整个ROS运行的核心,它主要的功能就是登记注册节点、服务和话题的名称,并维护一个参数服务器。
- cd catkin_ws
- source devel/setup.bash
- roscore
TurtleBot
启动turtlebot3仿真模型, 真实传感器,串口通信等。
- ssh [email protected]
- cd catkin_ws/
- source devel/setup.bash
- roslaunch turtlebot3_bringup turtlebot3_robot.launch
Remote PC
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
Remote PC
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
Remote PC
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
turtlebot3_robot.launch
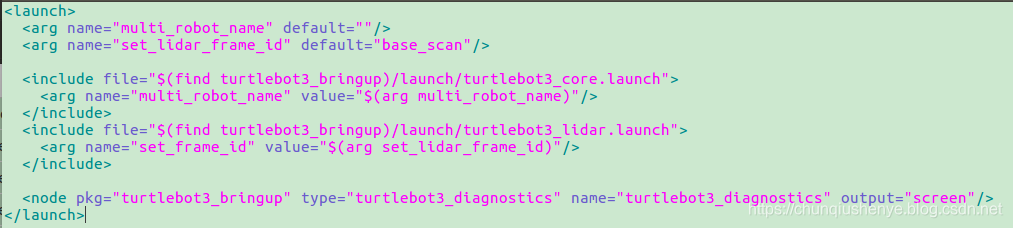 turtlebot3_core.launch
turtlebot3_core.launch
启动机器人串口通信

turtlebot3_lidar.launch
启动雷达 并且设置雷达数据的坐标系是"base_scan"

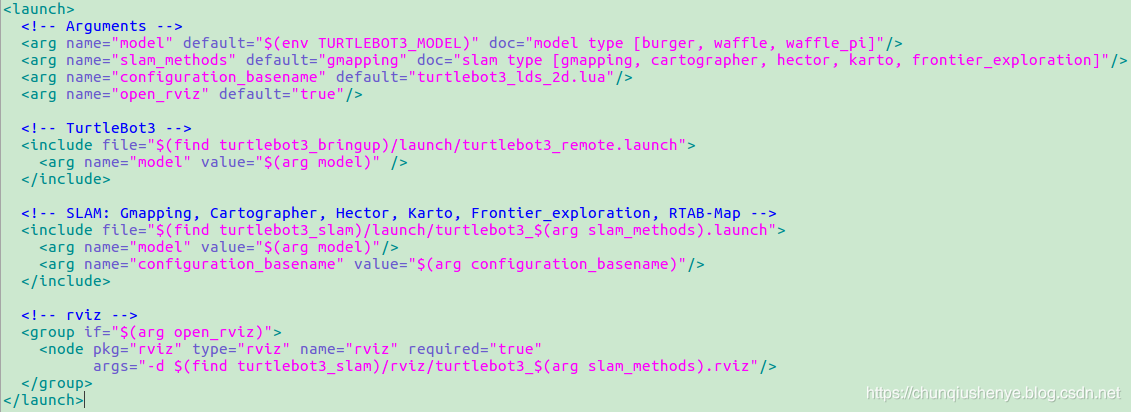
turtlebot3_slam.launch
有了一个新的发现就是slam方法可以用RTAB-Map替换!
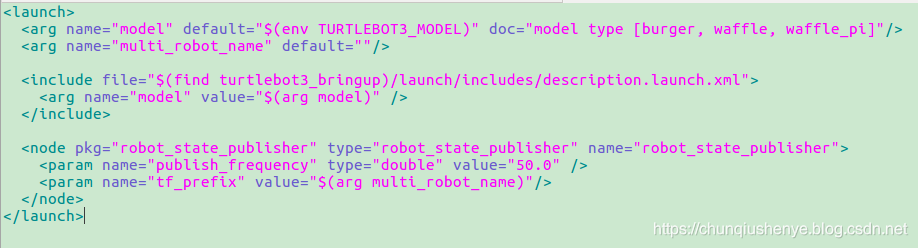
 turtlebot3_remote.launch
turtlebot3_remote.launch
robot state publisher
感觉是在做turtlebot3和slam之间之间连接的工作, 是在启动turtlebot3的软件就是仿真和硬件就是串口之间的通信。
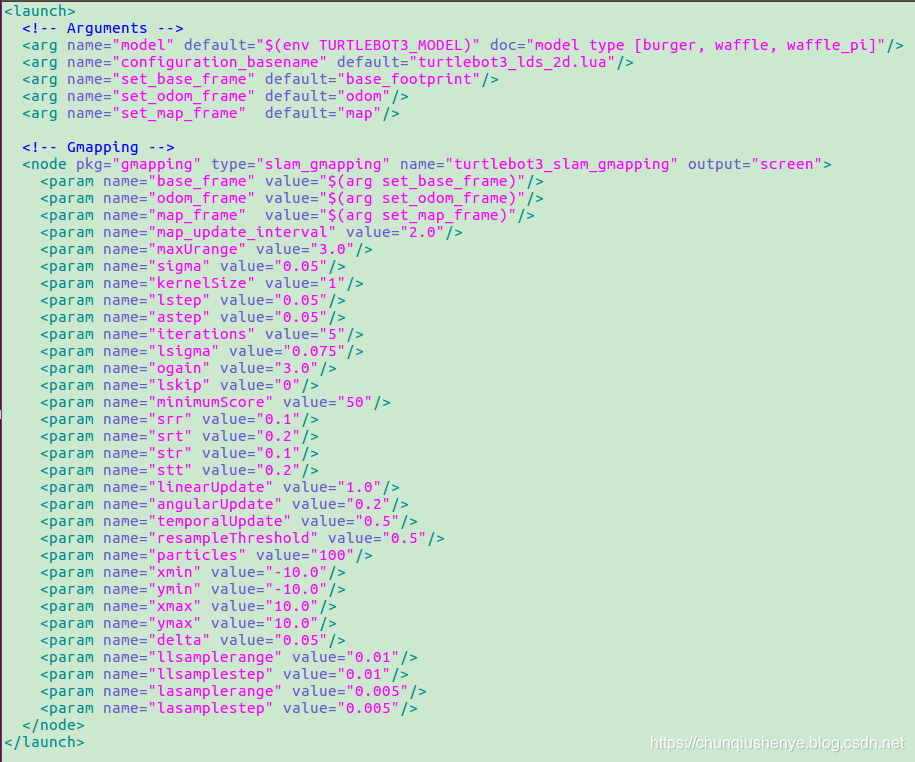
 turtlebot3_gmapping.launch
turtlebot3_gmapping.launch
设置数据的坐标系,
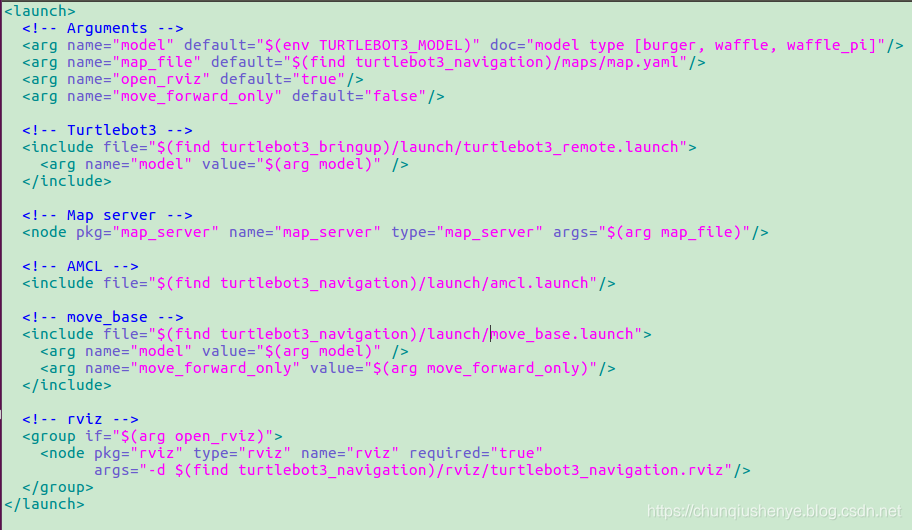
 turtlebot3_navigation.launch
turtlebot3_navigation.launch
设置一些参数,启动turtlebot3,载入地图,启动amcl,启动move_base
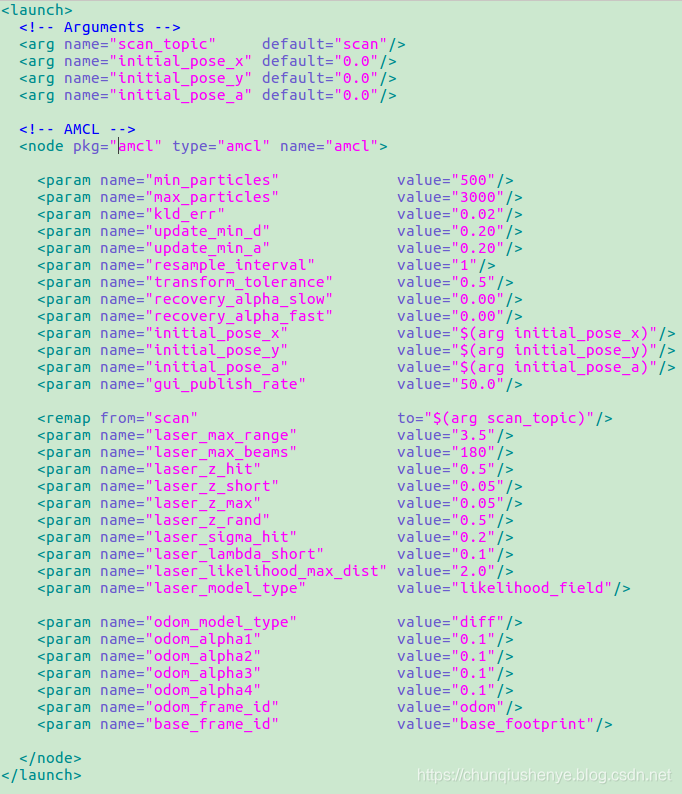
 amcl.launch
amcl.launch

move_base.launch
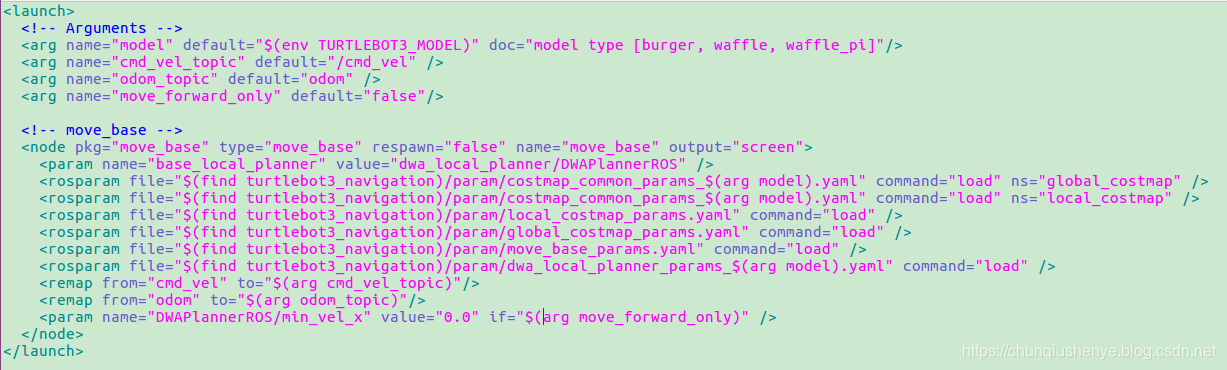 file="KaTeX parse error: Expected group after '_' at position 57: …p_common_params_̲(arg model).yaml" command=“load” ns="global_costmap"
file="KaTeX parse error: Expected group after '_' at position 57: …p_common_params_̲(arg model).yaml" command=“load” ns="global_costmap"
file="KaTeX parse error: Expected group after '_' at position 57: …p_common_params_̲(arg model).yaml" command=“load” ns="local_costmap"
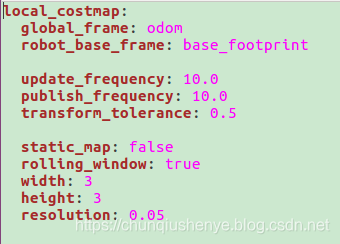
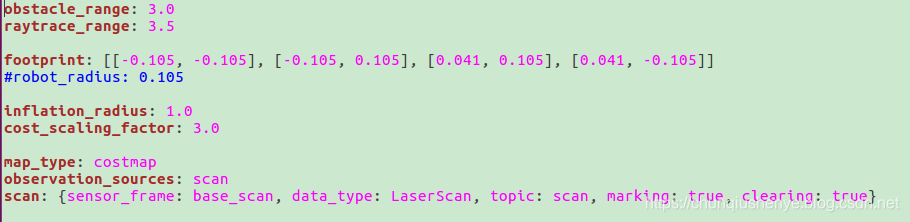 file="$(find turtlebot3_navigation)/param/local_costmap_params.yaml" command="load"
file="$(find turtlebot3_navigation)/param/local_costmap_params.yaml" command="load"
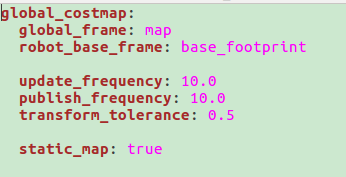
file="$(find turtlebot3_navigation)/param/global_costmap_params.yaml" command="load"
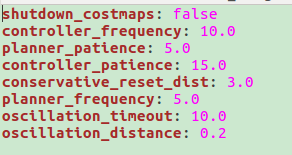
file="$(find turtlebot3_navigation)/param/move_base_params.yaml" command="load"
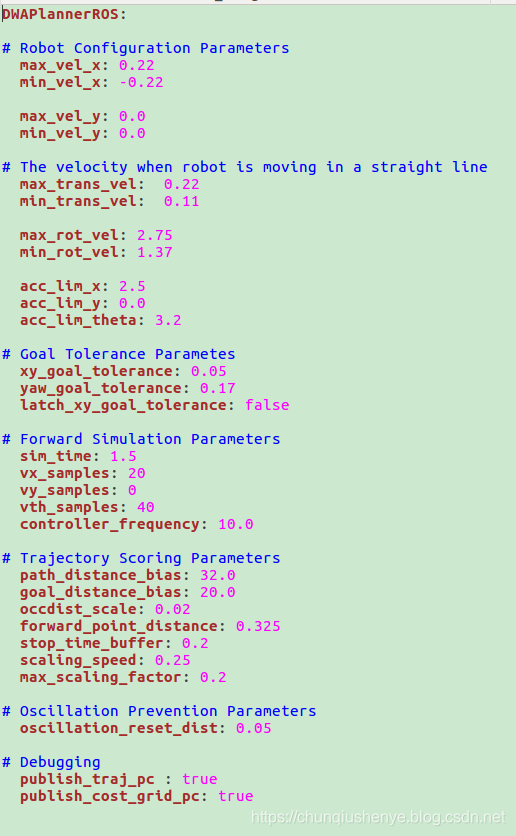
file="KaTeX parse error: Expected group after '_' at position 60: …_planner_params_̲(arg model).yaml" command="load"
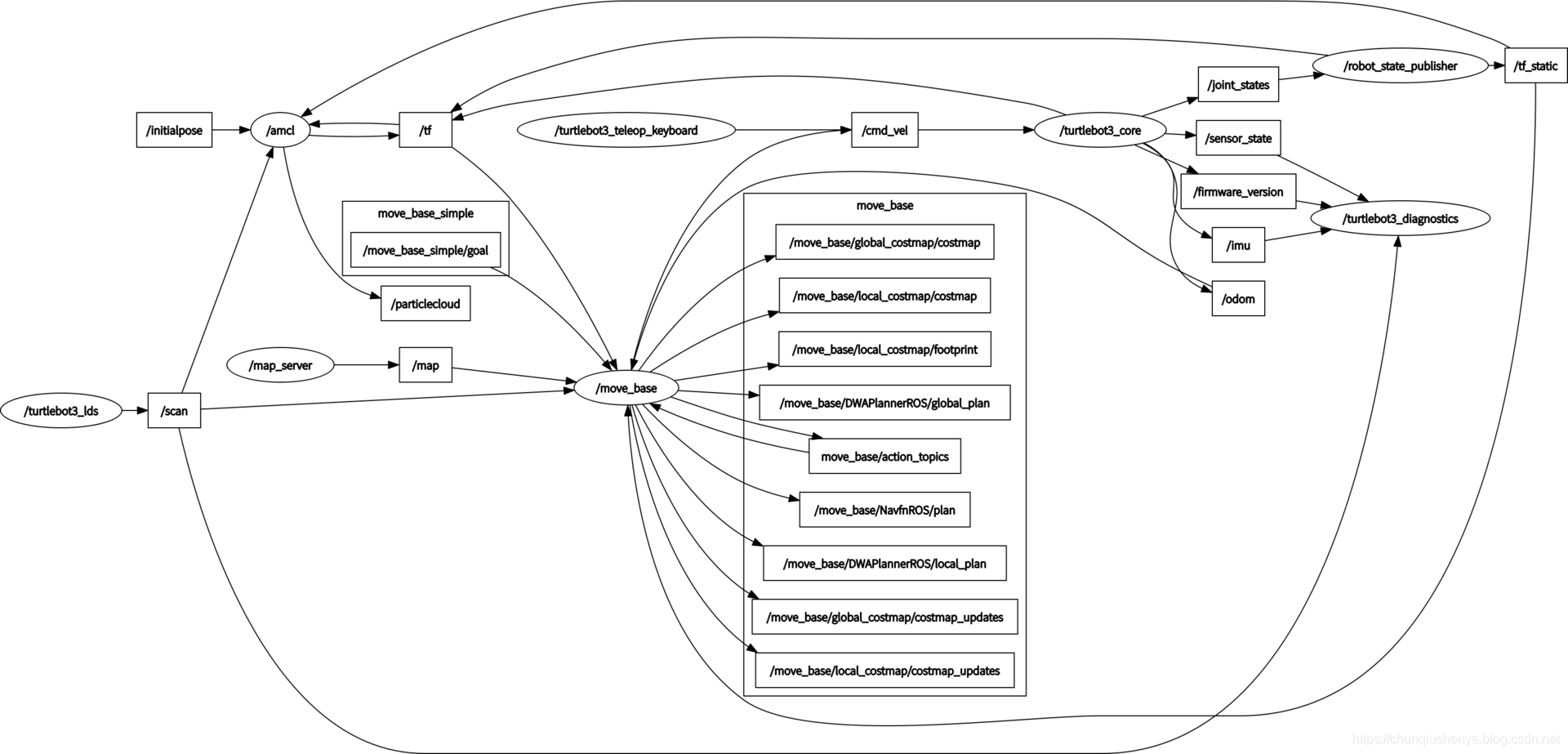
 rosrun rqt_tf_tree rqt_tf_tree
rosrun rqt_tf_tree rqt_tf_tree
 rosrun rqt_graph rqt_graph
rosrun rqt_graph rqt_graph