前言
因为我做《ros机器人编程实践》书上789章之前用的turtlebot3实践的,turtlebot3用的是激光雷达传感器,12章的巡线机器人用到了深度摄像头,所有无奈又只好装了turtlebot第一代来实验。
ros:kinetic
Ubuntu:16.04.6
gazebo:7.0.0
安装turtlebot
先感谢下前辈,参考装gazebo和turtlebot
前言
gazebo的版本最好是7.0的,不然安装turtlebot_simulator会报错。
输入以下:
gazebo -v
查看gazebo版本,我的是7.0.0,若要降版本参考上面的链接。
下载turtlebot
indigo版本ros:
sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
kinetic版本ros:
sudo apt-get install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-turtlebot-simulator ros-kinetic-kobuki-ftdi
sudo apt-get install ros-kinetic-rocon-*
配置环境
echo "source /opt/ros/kinetic/setup.bash" >>~/.bashrc
source ~/.bashrc
其中kinetic换成你的ros版本,本文以kinetic为主。
更新ros
rosdep update
这一步非常重要,update更新的网站不太稳定,常常失败,这里建议用手机热点。这里也是为了刚下载的ros包,不加的话有可能加载gazebo模型一直卡在preparing the world界面。
添加gazebo模型
!!!这一步非常重要,不然加载gazebo的模型一直卡在preparing the world界面。
到这https://bitbucket.org/osrf/gazebo_models/downloads/下载gazebo的所有模型,然后在~目录下按ctrl+h显示隐藏文件:
进到.gazebo中。创建models文件夹,然后把刚才下载的文件提取到文件夹下:
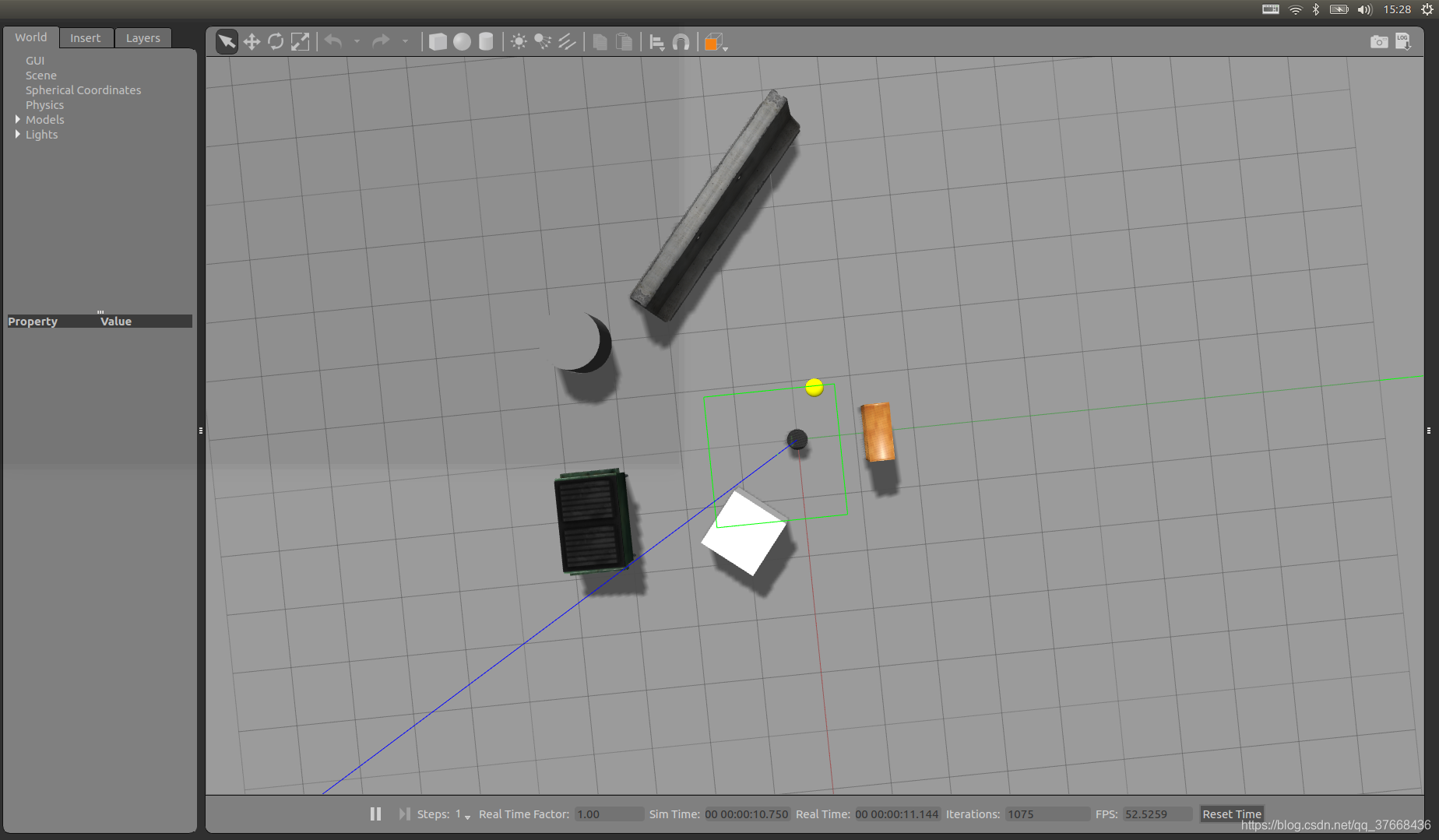
启动仿真环境
roslaunch turtlebot_gazebo turtlebot_world.launch
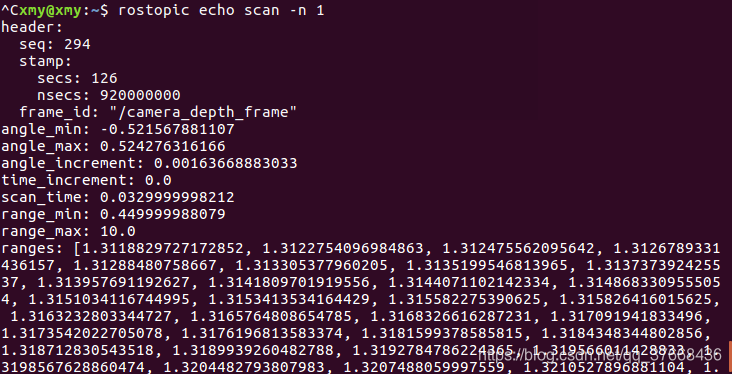
读取传感器数据
rostopic echo scan -n 1
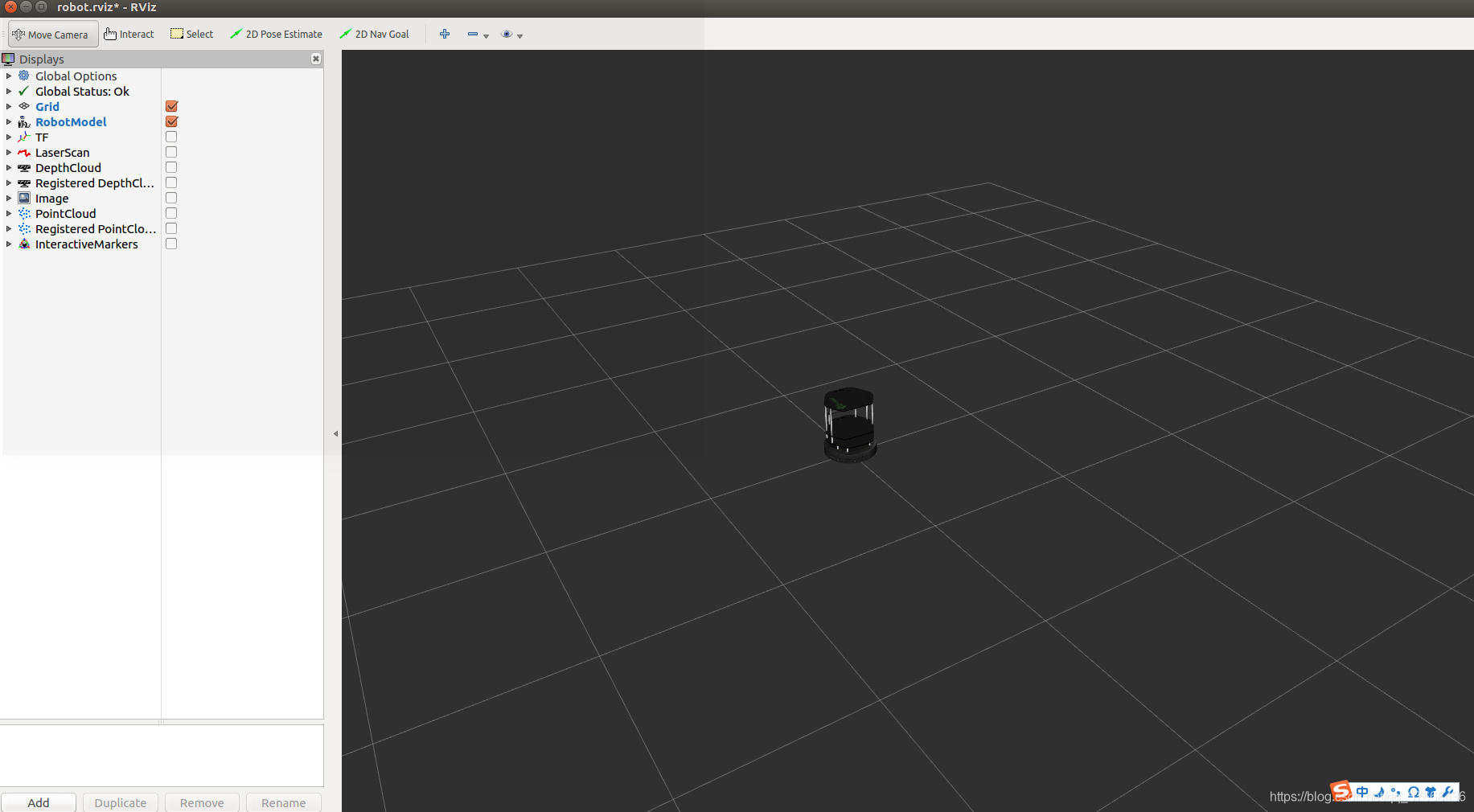
在rviz中操作机器人
加载世界地图
roslaunch turtlebot_gazebo turtlebot_world.launch
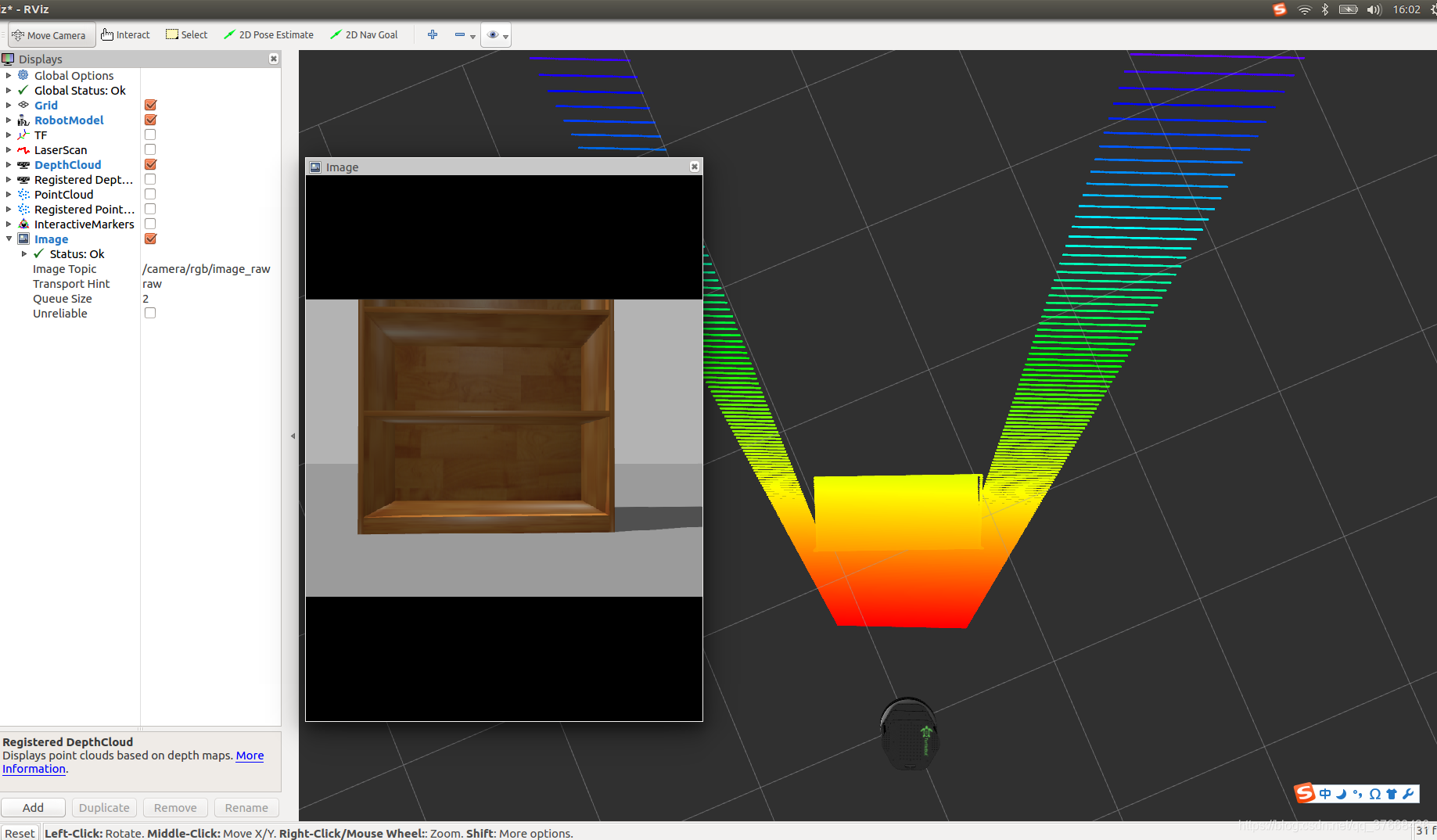
在rviz中显示
roslaunch turtlebot_rviz_launchers view_robot.launch --screen
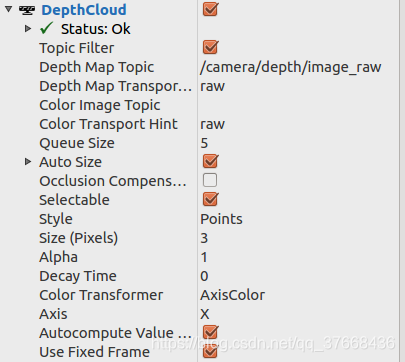
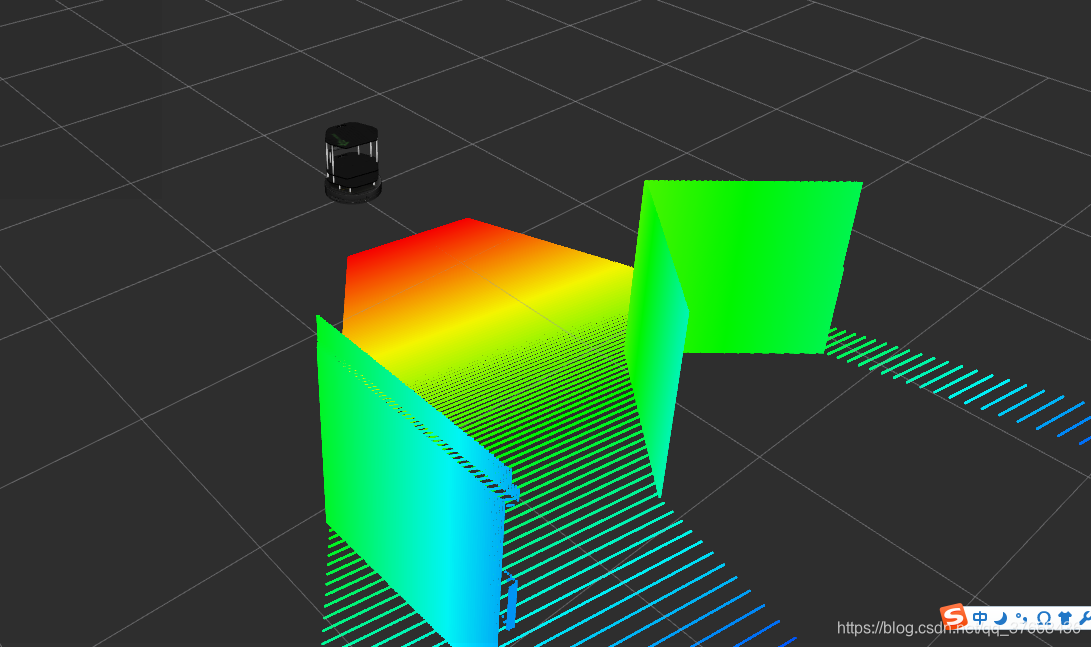
DepthCloud选项
显示深度相机数据
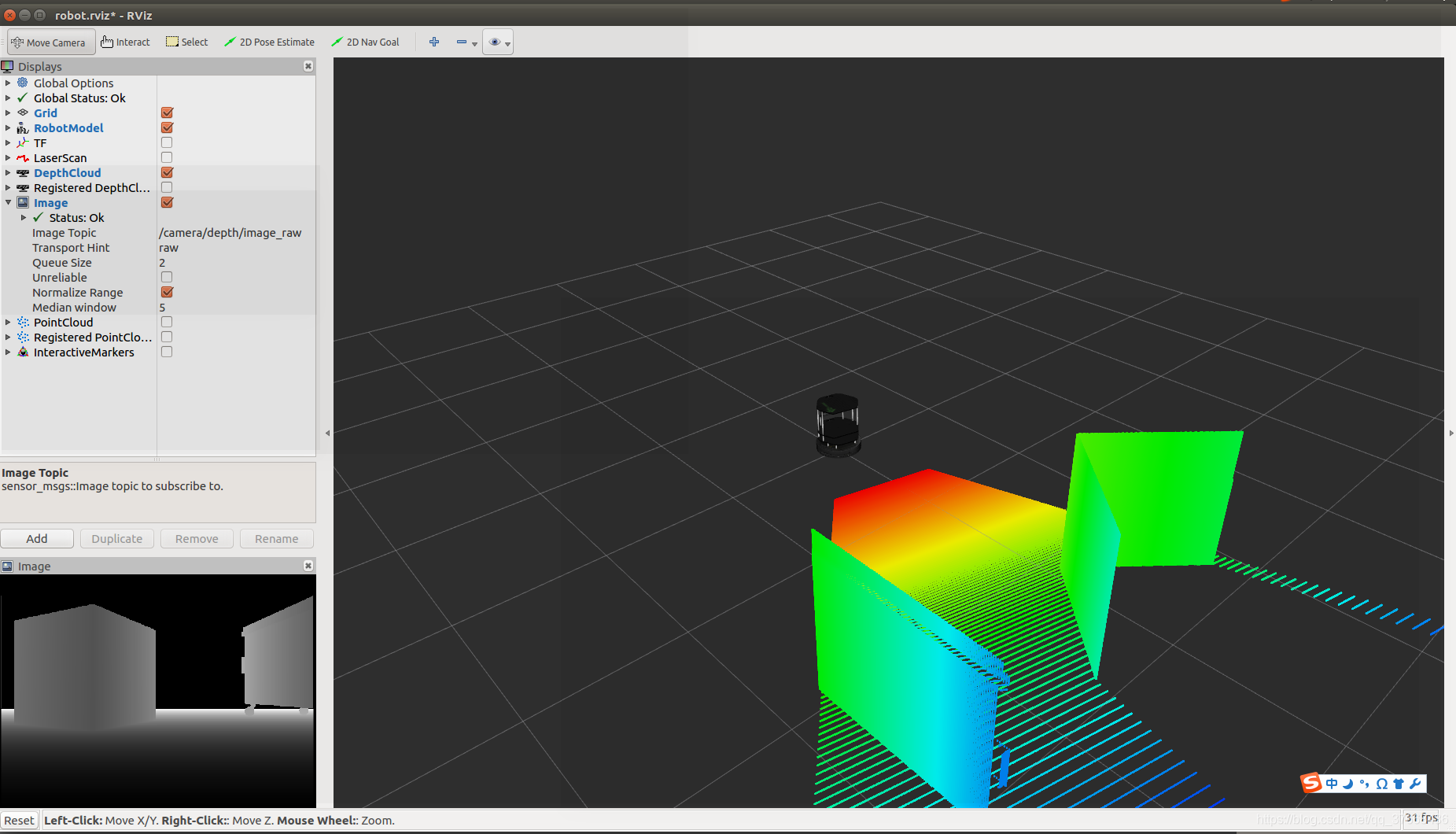
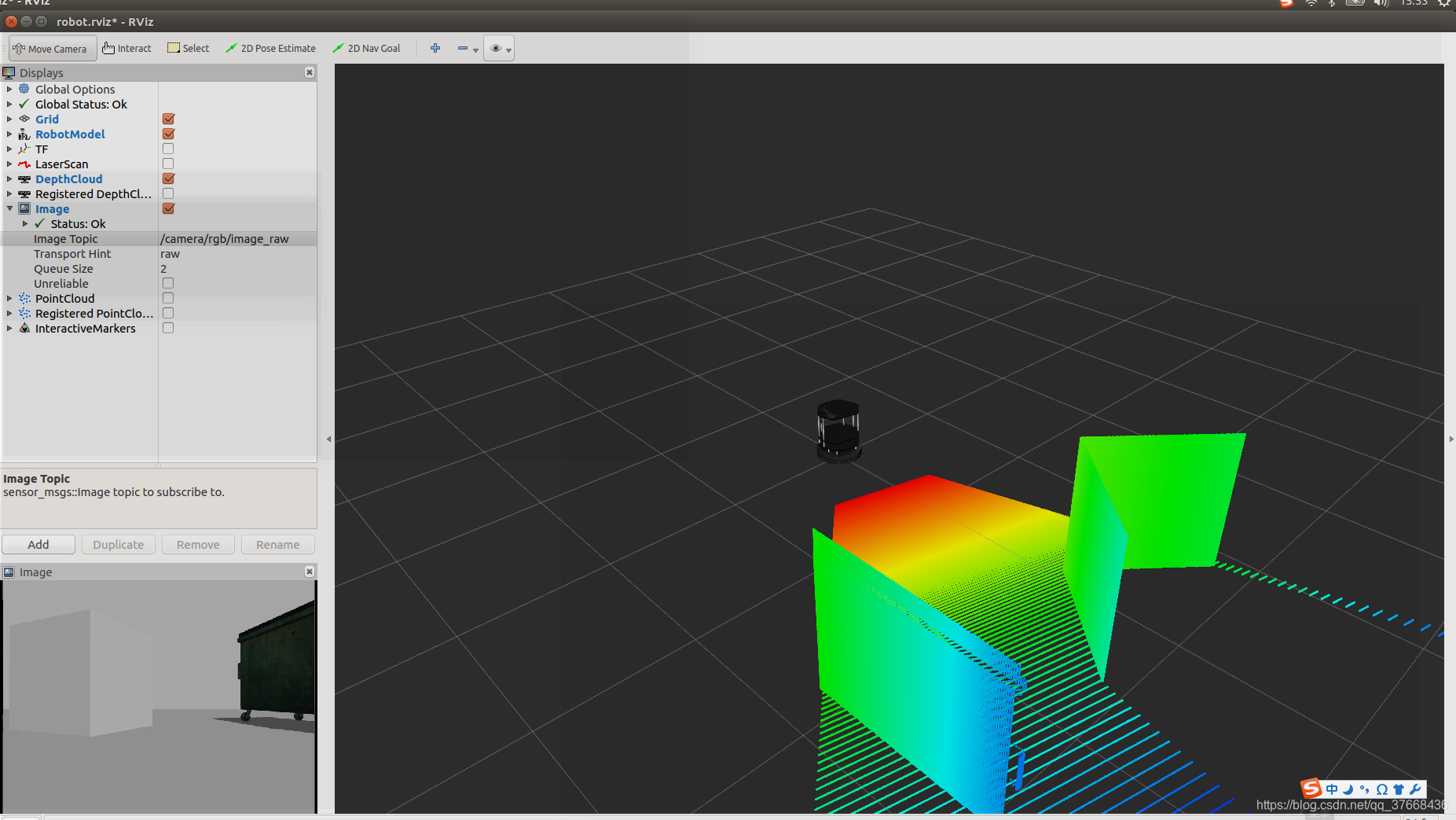
Image选项
显示深度图片或者rgb图片
选择话题为深度图片:
选择话题为rgb话题:
俯视图: