地图导航需要启动amcl节点和move_base节点,rviz节点。
1.amcl节点
(1)amcl接收从rviz中传送过来的初始化位置。
initial_pose_sub_ = nh_.subscribe("initialpose", 2, &AmclNode::initialPoseReceived, this);订阅rviz 发布的initialpose话题。如果收到rviz中传送过来的初始化位置调用AmclNode::initialPoseReceived函数。
(2)amcl向map_server发送信息,获取地图
requestMap()(3)如果获取地图和初始化位置成功,初始化粒子滤波
AmclNode::applyInitialPose()(4)初始化激光,广播tf信息。
this->tfb_->sendTransform(tmp_tf_stamped);2.move_base节点
(1)move_base节点从amcl接收tf消息,其中固定的frame为map,就是原点位置的名字叫做map,由于amcl中已经由粒子滤波计算出来了机器相对于地图的位置,用odom表示机器,那么amcl发送odom到map的tf在move_base节点中就可以接收到了。
tf::TransformListener tf(ros::Duration(10));
move_base::MoveBase move_base( tf );(2)move_base节点新建局部地图和全局地图,并发送地图信息
controller_costmap_ros_ = new costmap_2d::Costmap2DROS("local_costmap", tf_);其中Costmap2DROS类中发送地图信息
publisher_ = new Costmap2DPublisher(&private_nh, layered_costmap_->getCostmap(), global_frame_, "costmap",
always_send_full_costmap);(3)当move_base节点的局部地图和全局地图启动后,local_costmap从gazebo中接收里程计信息/odom和激光信息/scan并且更新局部地图。同时更新全局地图。
// Start actively updating costmaps based on sensor data
planner_costmap_ros_->start();查看start函数发现将所有的插件设置为activate
(*plugin)->activate();发现加载的插件为costmap_2d::InflationLayer ,costmap_2d::ObstacleLayer ,
costmap_2d::StaticLayer,costmap_2d::VoxelLayer
在costmap_2d::ObstacleLayer 类中的可以发现此类订阅了sensor_msgs::LaserScan消息
boost::shared_ptr < message_filters::Subscriber<sensor_msgs::LaserScan>
> sub(new message_filters::Subscriber<sensor_msgs::LaserScan>(g_nh, topic, 50));(4)move_base节点在executeCb函数中的 bool done = executeCycle(goal, global_plan)中发送cmd_vel信息,gazebo接收此信息并控制机器人运动,
首先新建一个路径规划类
boost::shared_ptr<nav_core::BaseGlobalPlanner> planner_
planner_ = bgp_loader_.createInstance(global_planner);
planner_->initialize(bgp_loader_.getName(global_planner), planner_costmap_ros_);以上是使用插件的方式新建一个nav_core::BaseGlobalPlanne类。相当于new 一个这样的类。初始化的时候要将costmap地图传给该类。
初始化好后就要根据起始点,终点和地图来找全局路径了
planner_->makePlan(start, req.goal, global_plan)找到路径后将路径发给局部地图规划器
nav_core::BaseLocalPlanne tc_
首先设置路径,
tc_->setPlan(*controller_plan_)然后将根据路径计算控制命令
tc_->computeVelocityCommands(cmd_vel)完成路径规划。
如何生成导航路径主要由makePlan来实现,具体使用什么算法生成导航路径将在下篇博文中介绍
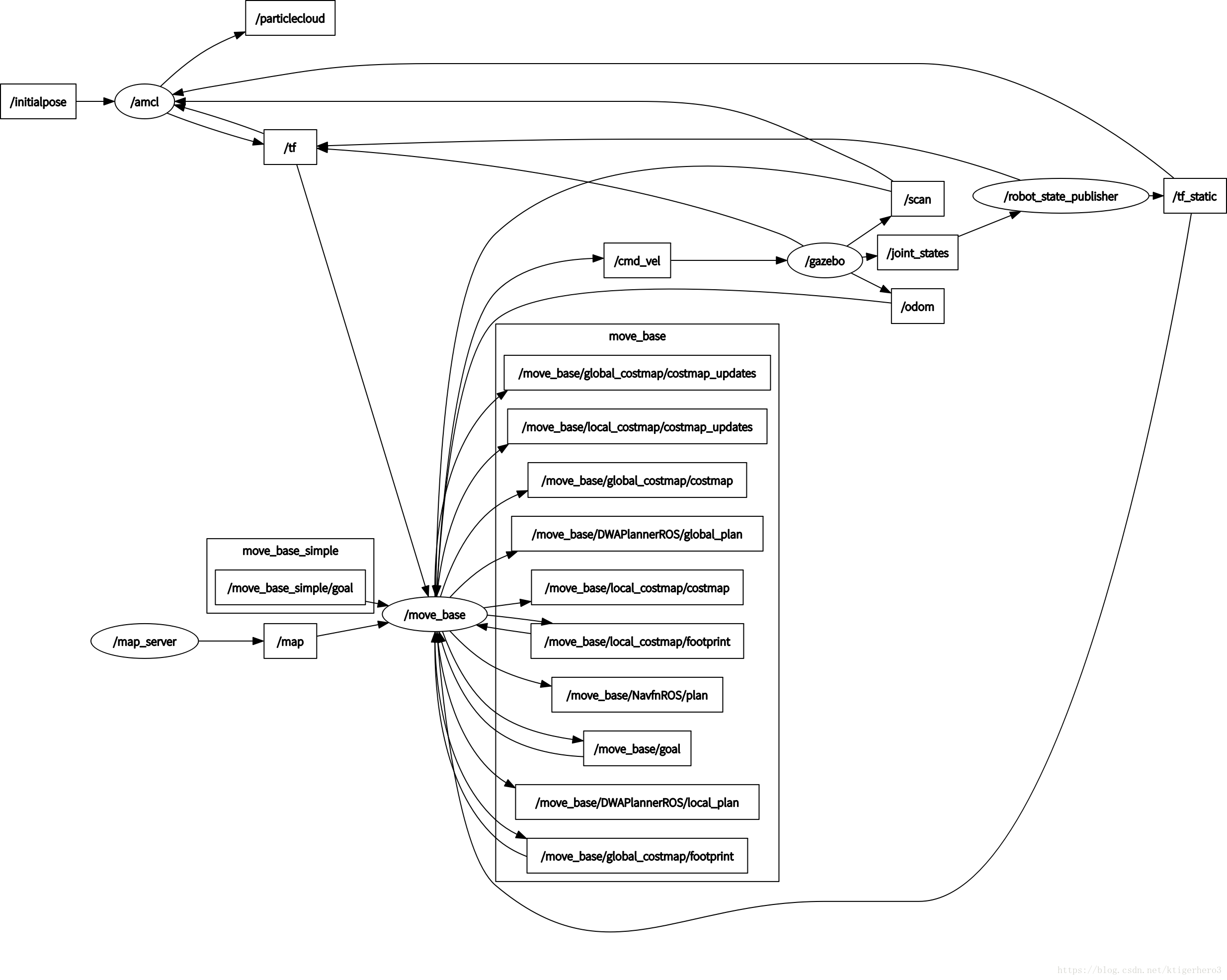
下图为节点关系图