创建和编译工作空间
$ mkdir -p ~/catkin_ws/src
$ cd catkin_ws/src
$ catkin_init_workspace
$ cd ..
$ catkin_make下载Turtlebot3相关工具包
$ cd ~/catkin_ws/src
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
$ git clone https://github.com/ros-teleop/teleop_twist_keyboard.git安装相关的依赖项及编译
$ cd ..
$ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
$ catkin_make启动机器人模型
Turtlebot3有三种型号的机器人,Burger、Waffle和Waffle Pi,在每次启动launch文件的时候都需要通过export命令来导入选择的机器人模型,当然也可以通过修改~/.bashrc文件而不必每次都要输入带来的麻烦。
以waffle为例
Gazebo是一款3D仿真器,由于使用了物理引擎和图形效果,因此会占据大量的CPU、GPU和RAM的资源,第一次加载模型时可能会比较慢,耐心等等。
$ roscore
$ source ~/catkin_ws/devel/setup.bash
$ export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
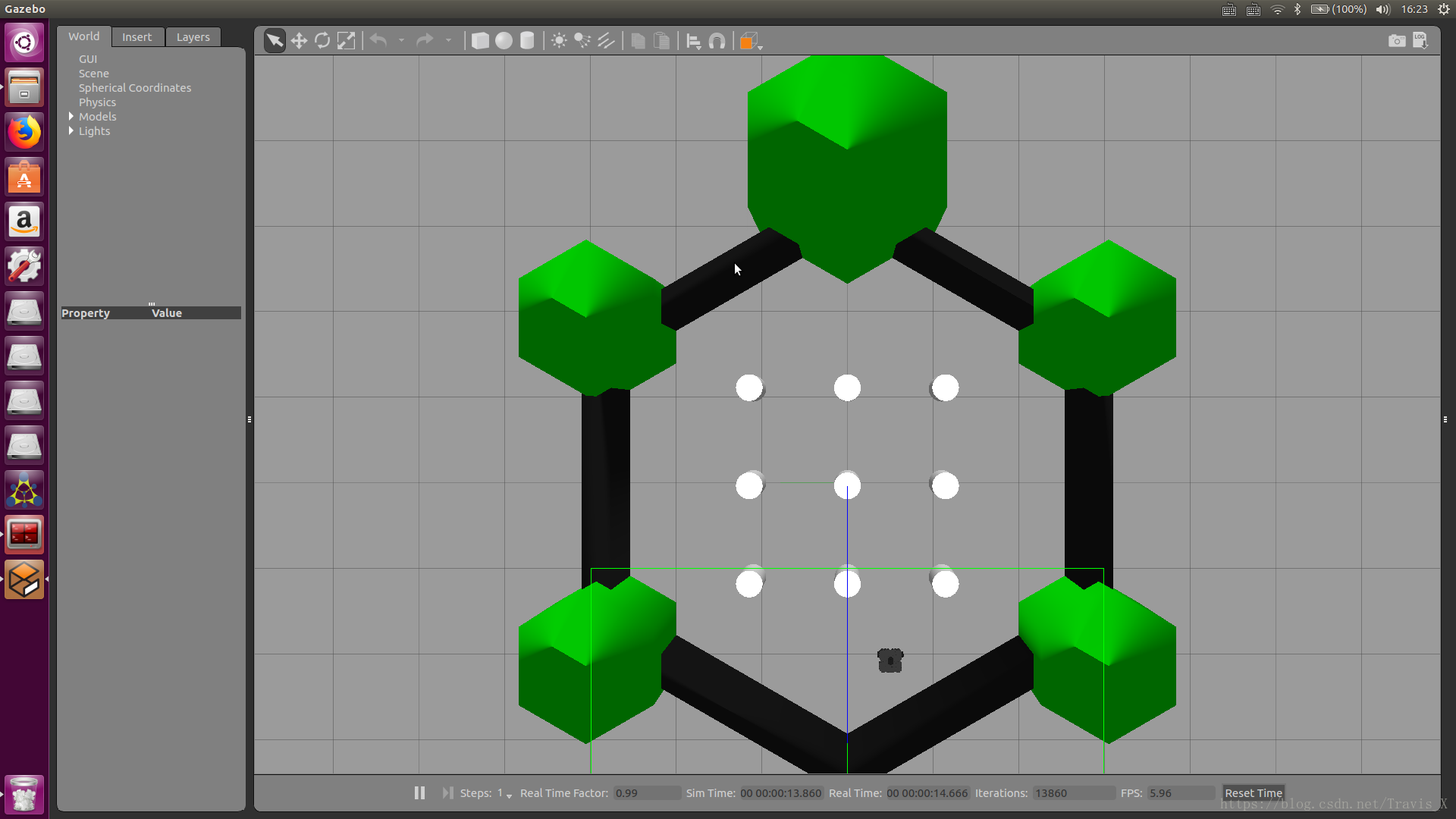
可以在Gazebo环境中用键盘控制虚拟TurtleBot3
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launchgazebo导航
先运行gazebo环境
$ export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch启动导航文件
$ export TURTLEBOT3_MODEL=waffle
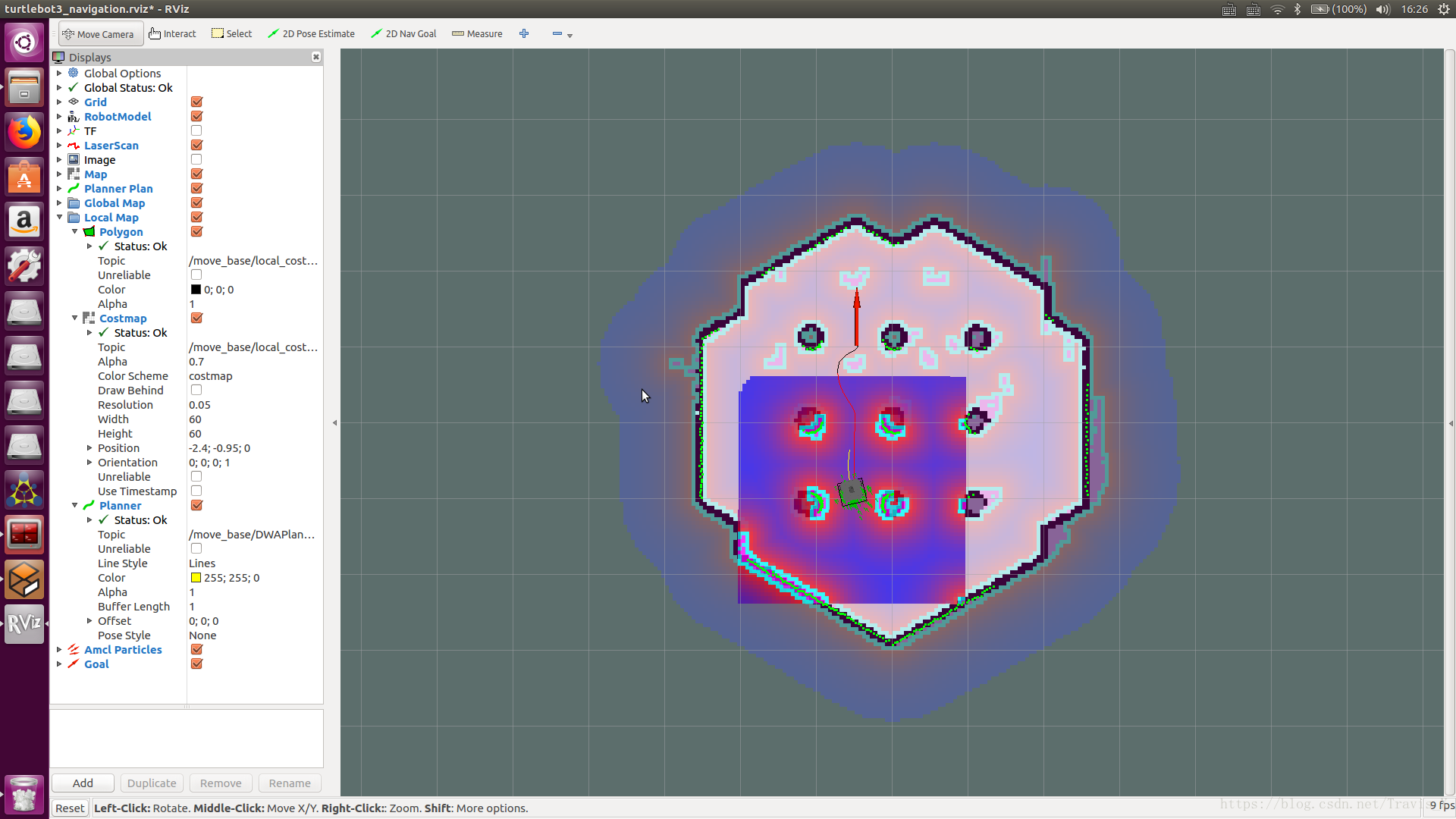
$ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml运行RViz
$ export TURTLEBOT3_MODEL=waffle
$ rosrun rviz rviz -d `rospack find turtlebot3_navigation`/rviz/turtlebot3_nav.rviz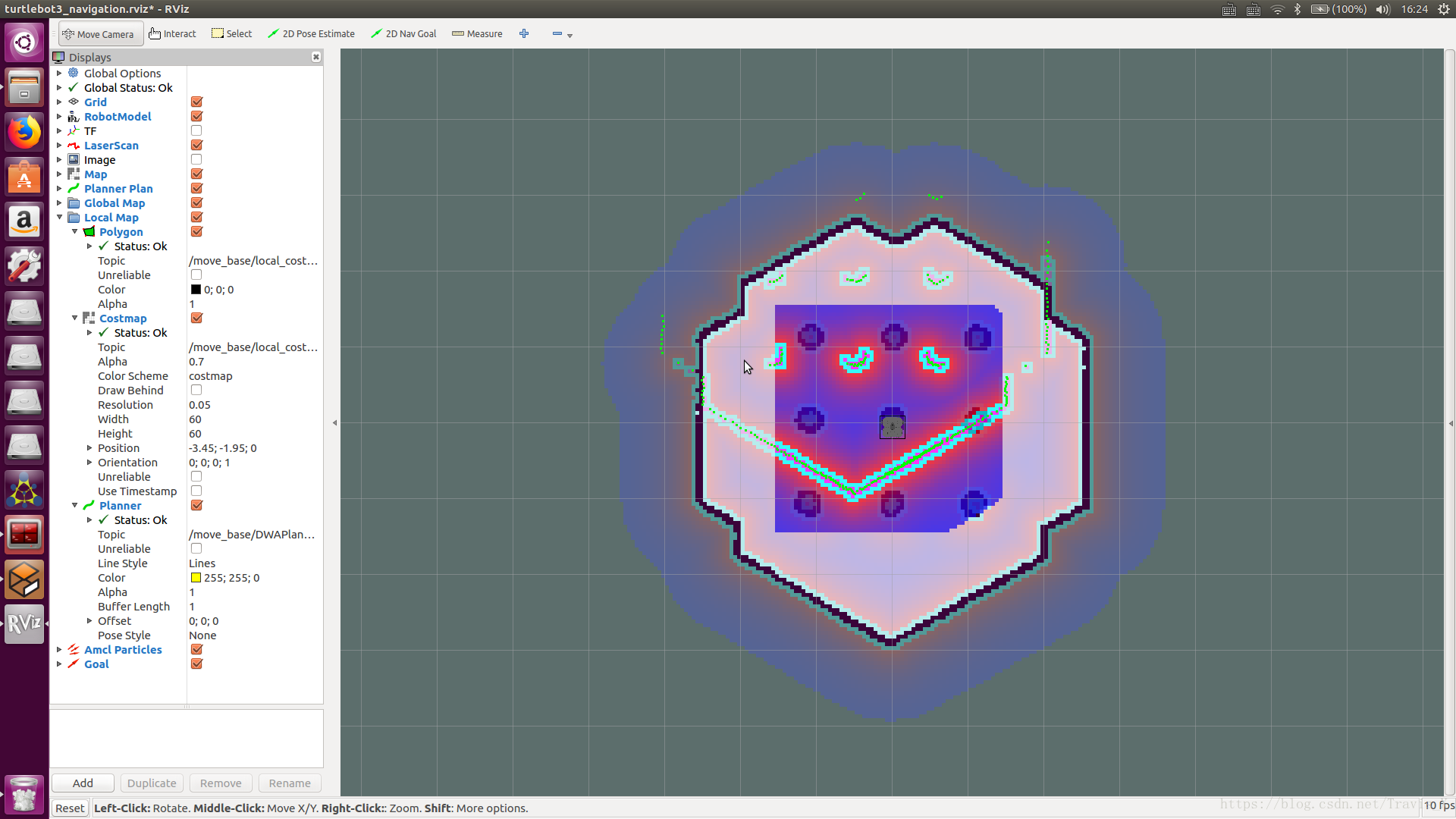
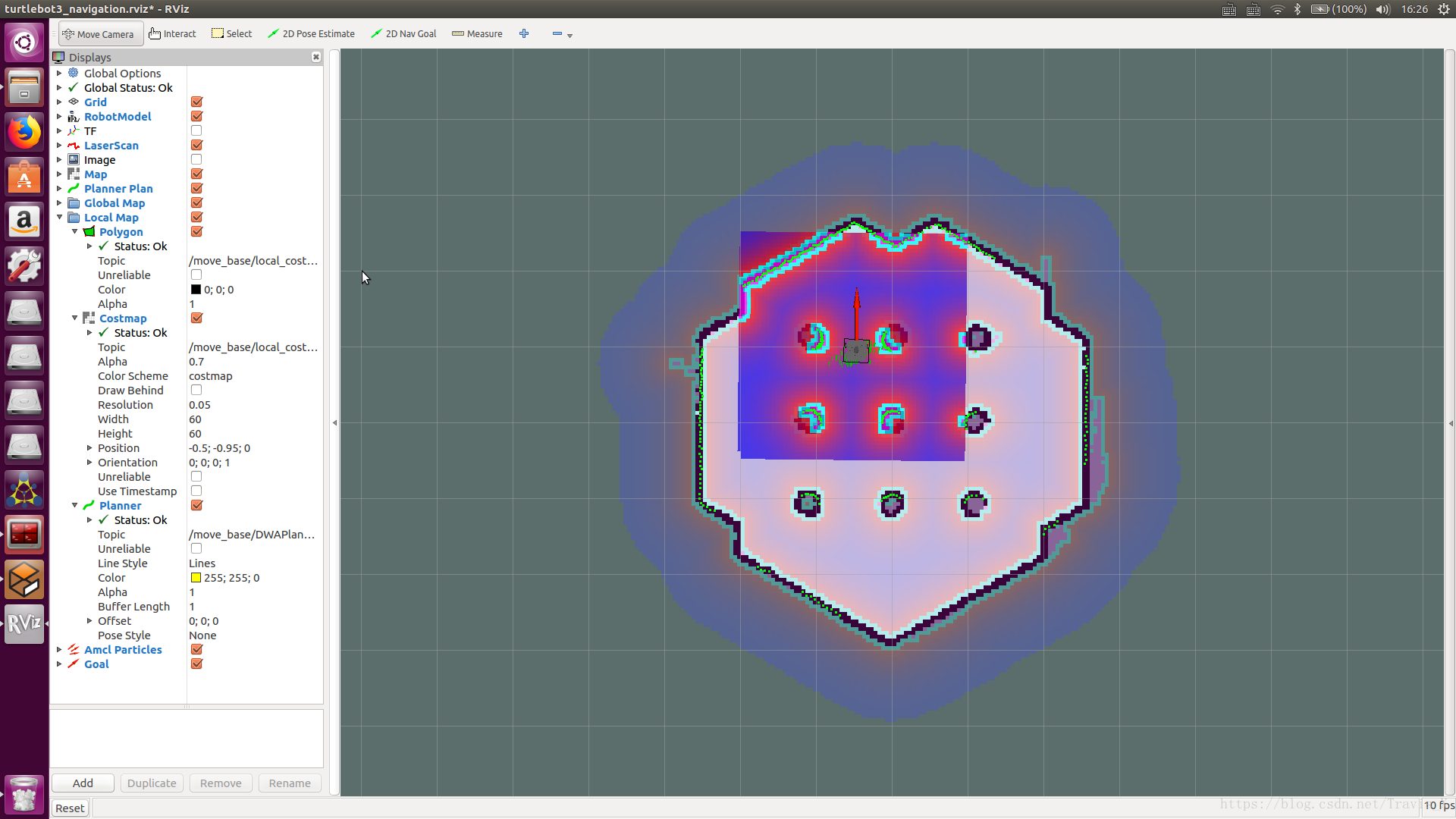
开始时rviz显示激光雷达扫出的平面并没有与地图的重合,点击rviz上方的2D Pose Estimate按钮设置机器人的初始位置,就可以实现边界的重合了。
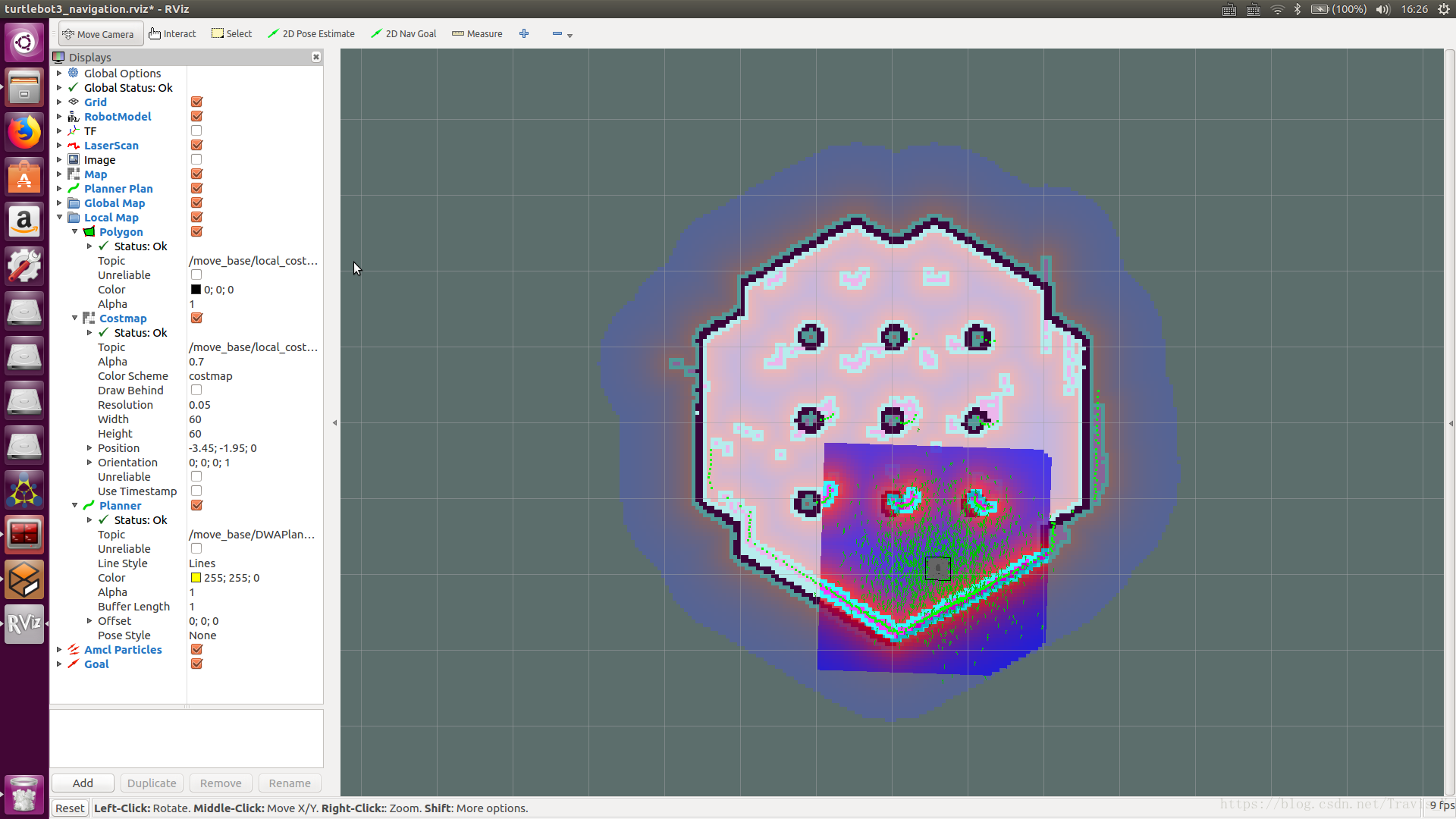
点击rviz上方的2D New Goal按钮设置机器人的目标位置,设定完后机器人就能自主导航到目标位置。