版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/ktigerhero3/article/details/80722381
本文实现turtlebot3在仿真环境下的的导航功能.
由于官方教程中要点击2D Pose Estimate按钮给出初始数据,但是我根据教程通过单击并拖动地图上的方向来设置地图上的大致位置总是不能成功,因此,只能自己想别的办法.我实现在仿真环境下的导航的步骤如下.
(1)首先在仿真环境下建造一个地图,并保存
(2)加载保存地图的仿真环境
(3)加载这个地图并启动导航包
(4)开始导航
注意要先加载仿真环境再加载地图
1.仿真环境下建造一个地图,并保存
参考
https://blog.csdn.net/ktigerhero3/article/details/80630393
保存的地图文件为map.pgm和map.yaml
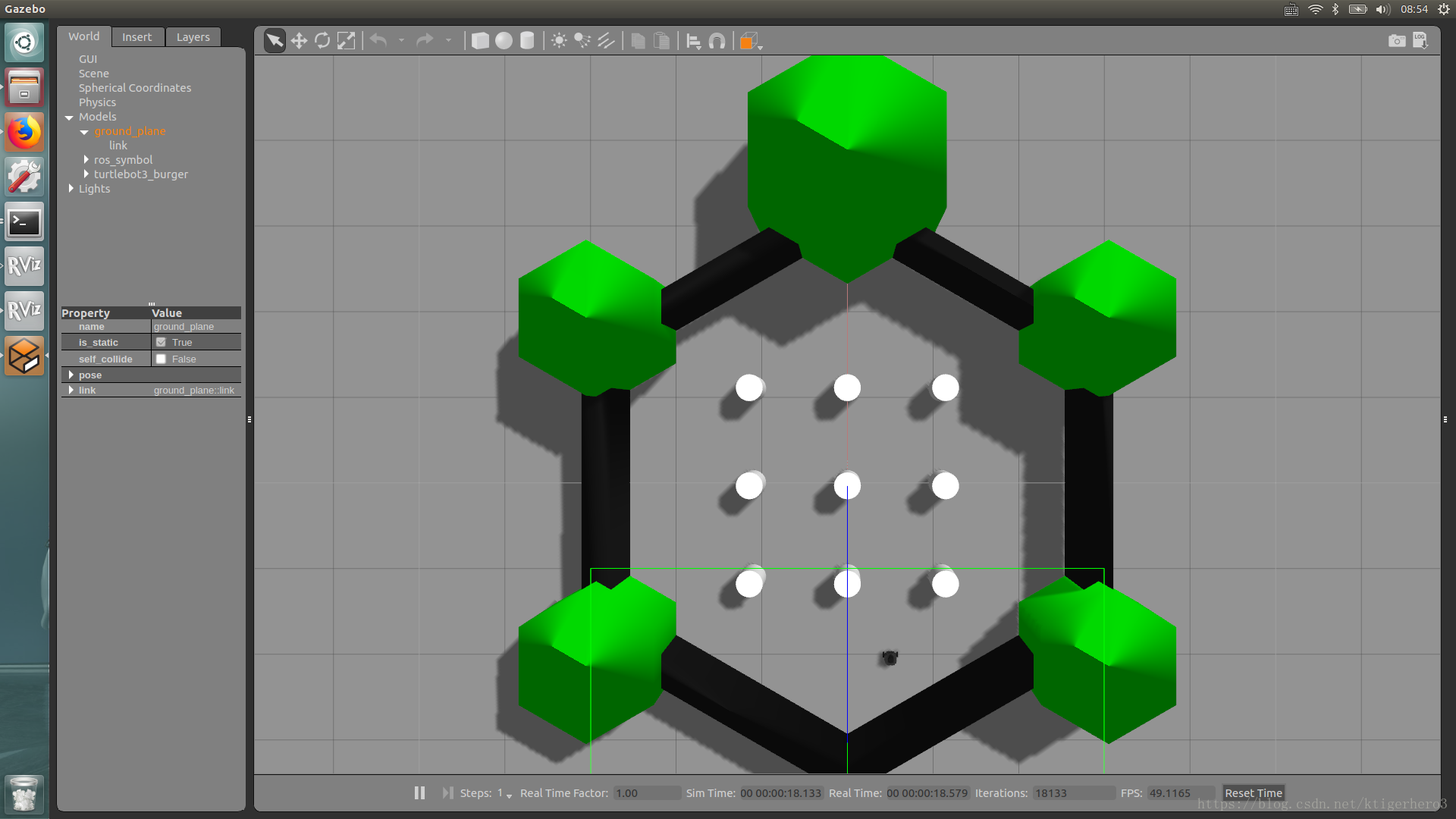
2.加载仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch启动后的地图如下
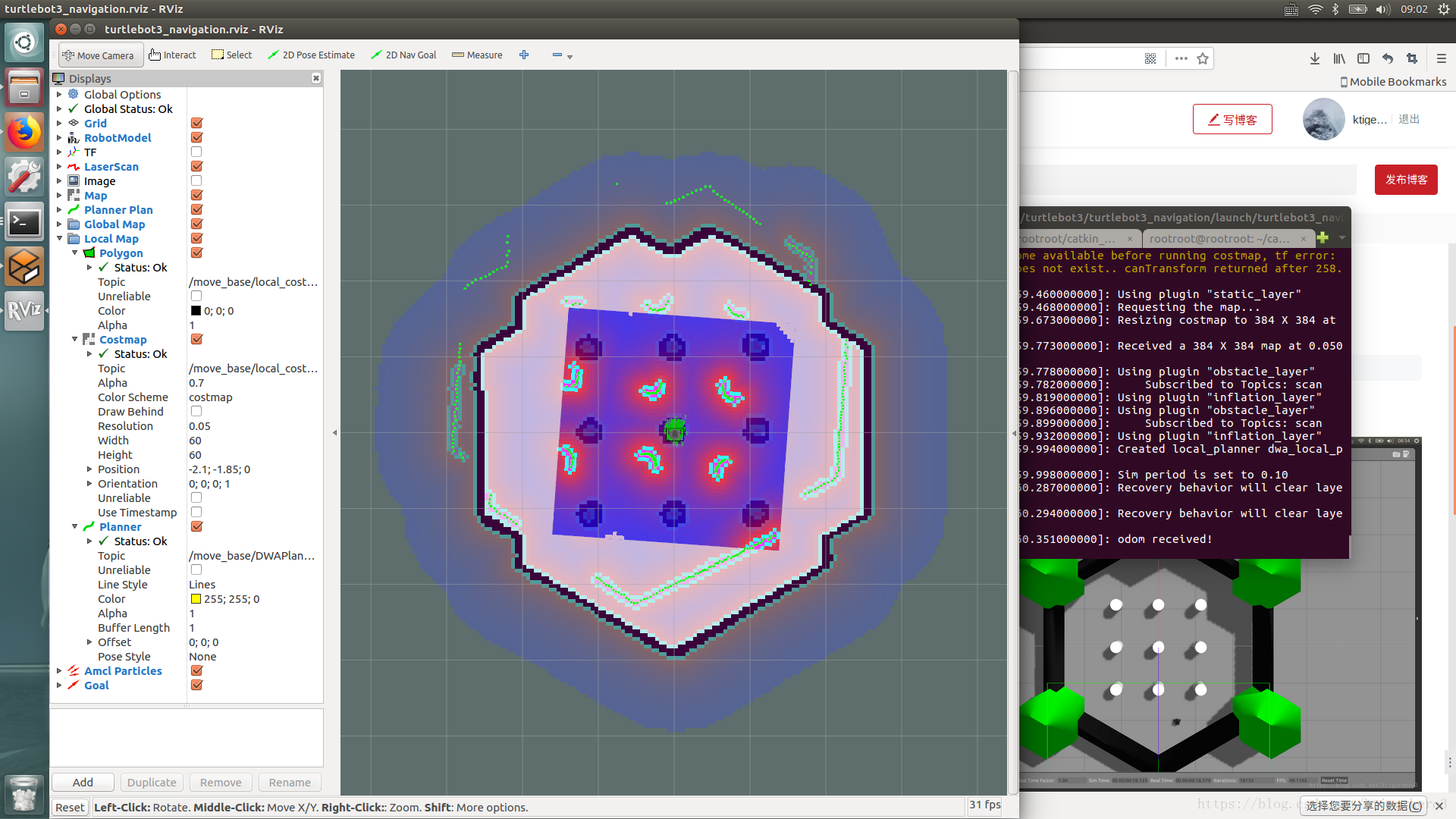
3 加载这个地图
打开导航包,加载的地图为保存的map.yaml,机器人使用的是burger
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml此时效果如图
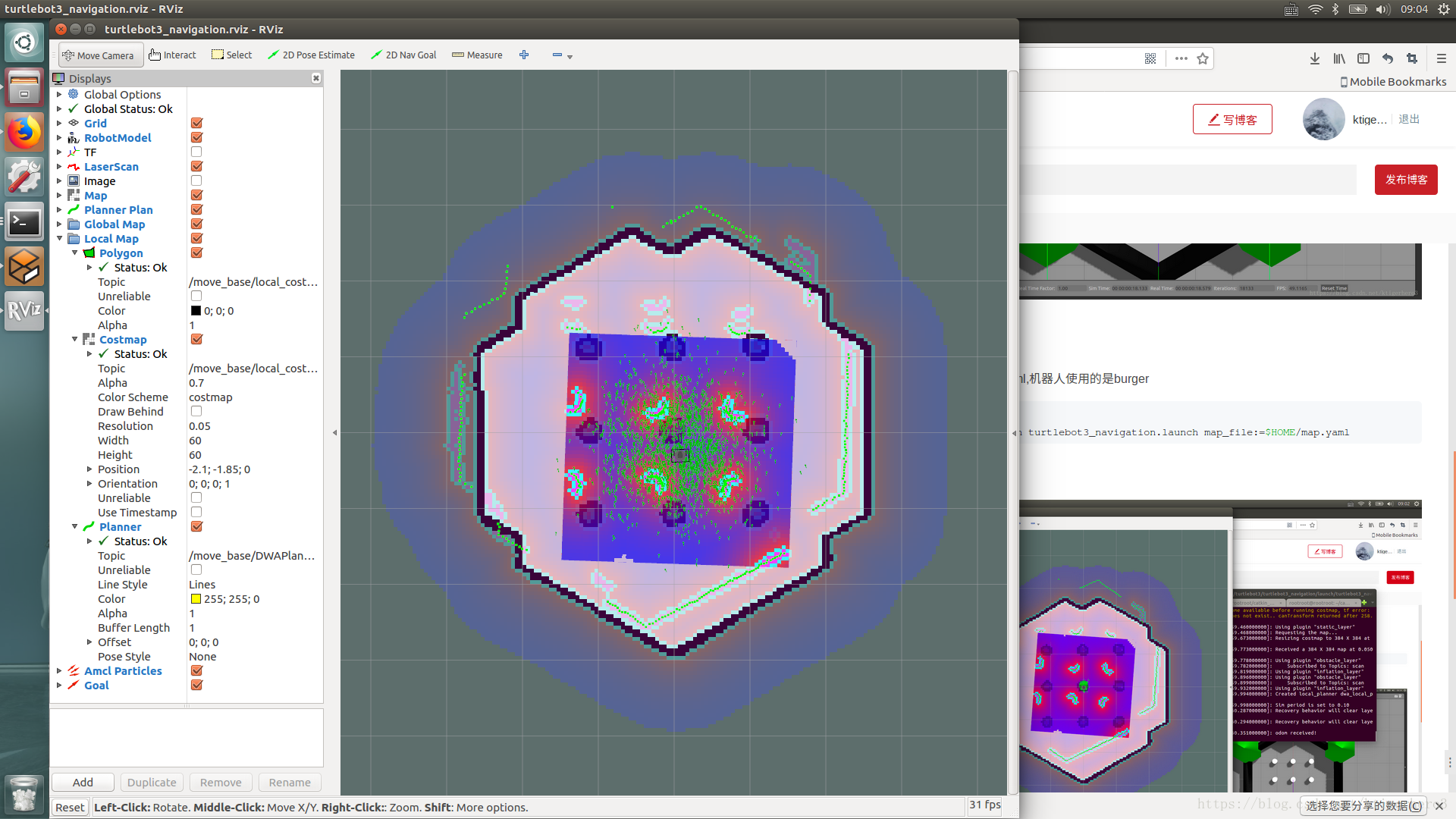
有此时需要设置初始位置,点击2D Pose Estimate按钮,并拖动地图上的方向来设置地图上的大致位置
设置好后会有粒子出现
如图
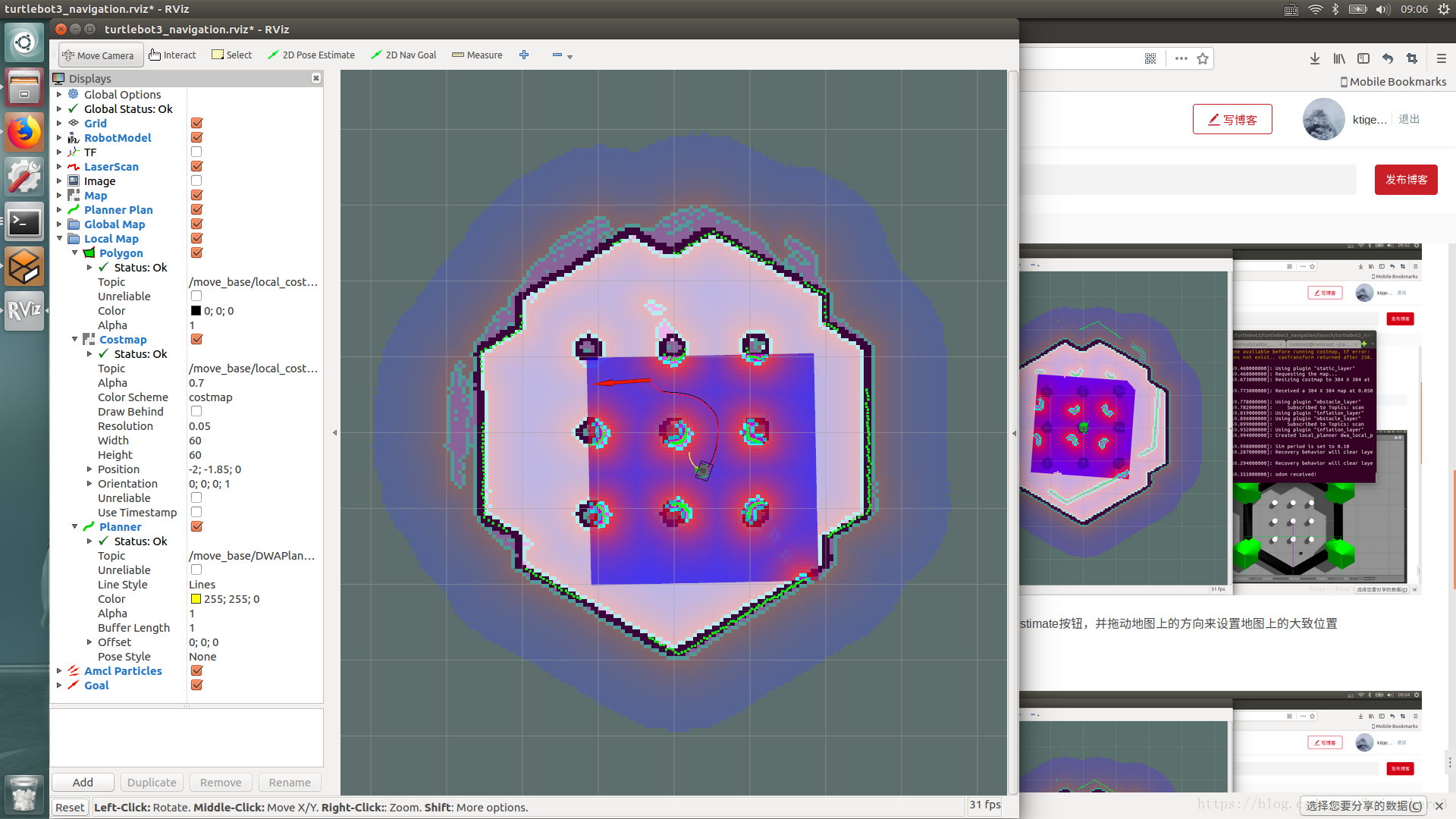
(4)开始导航
点击2D Nav Goal按钮,并拖动设置方向,如图,就可以导航了