ROS melodic自带Gazebo,所以就不用去下载。Gazebo在虚拟机上运行比较卡,没有RViz顺畅,如果要用的话可以考虑双系统。
1、安装turtlebot3_simulation
在仿真之前,需要下载一个turtlebot3_simulation,在GitHub上可以下载。下载的文件放到工作空间catkin_ws的src文件夹里。下载命令:
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/catkin_ws && catkin_make
2、选择model type
每次仿真之前需要选择model type,一共有三个,burger、waffle、waffle_pi,这里我们选择burger。打开终端执行命令:
$ export TURTLEBOT3_MODEL=burger
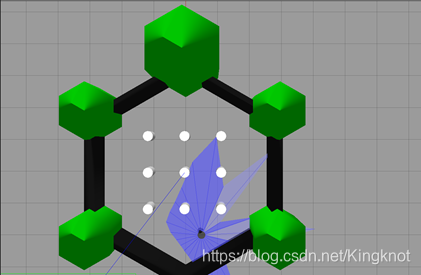
3、加载地图文件
加载地图文件,使用如下命令:
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
4、启动键盘控制机器人
新开一个终端输入:
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
在键盘上用w进行加速,s进行减速,a和d进行角度调整。