前言
汇总版在这篇文章:自动控制原理上课笔记
线性系统的稳定性
线性系统的稳定性分析
线性系统的稳定性仅取决于系统自身的固有特性,而与外界条件无关。因此,设线性系统在初始条件为零时,作用一个理想单位脉冲,这时系统的输出增量为脉冲响应 c ( t ) c(t) c(t)。这相当于系统在扰动信号作用下,输出信号偏离原平衡工作点的问题。若 t → ∞ t\to\infty t→∞时,脉冲响应:
lim t → ∞ c ( t ) = 0 \lim_{t\to\infty}c(t)=0 t→∞limc(t)=0
即输出增量收敛于原平衡工作点,则线性系统是稳定的。
根据李雅普诺夫稳定性理论,线性控制系统的稳定性可叙述如下:
若线性控制系统在初始扰动的影响下,其动态过程随时间的推移逐渐衰减并趋于零(原平衡工作点),则称系统渐近稳定,简称稳定;反之,若在初始扰动影响下,系统的动态过程随时间的推移而发散,则称系统不稳定。
线性系统稳定的充分必要条件:闭环系统特征方程的所有根均具有负实部;或者说,闭环传递函数的极点均严格位于左半 s 平面 。
若特征根中具有一个或一个以上零实部根,而其余的特征根均具有负实部,则脉冲响应 c ( t ) c(t) c(t) 趋于常数,或趋于等幅正弦振荡,按照稳定性定义,此时系统不是渐近稳定的,处于稳定和不稳定的临界状态,常称为临界稳定情况。
在经典控制理论中,只有渐近稳定的系统才称为稳定系统;否则,称为不稳定系统。
线性系统稳定的充分且必要条件:劳思表中第一列各值为正。
如果劳思表第一列中出现小于零的数值,系统不稳定,且第一列各系数符号的改变次数,代表特征方程的正实部根的数目。
线性系统的稳态误差计算
- 控制系统的稳态误差,是系统控制准确度(控制精度)的一种度量,通常称为稳态性能指标。
- 在控制系统设计中,稳态误差是一项重要的技术指标。
- 对于一个实际的控制系统,由于系统结构、输入作用的类型(控制量或扰动量)、输入函数的形式(阶跃、斜坡或加速度)不同,控制系统的稳态输出不可能在任何情况下都与输入量一致,也不可能在任何形式的扰动作用下都能准确地恢复到原平衡位置。
- 此外,控制系统中不可避免地存在摩擦、间隙、不灵敏区、零位输出等非线性因素,都会造成附加的稳态误差。
- 可以说,控制系统的稳态误差是不可避免的,控制系统设计的任务之一,是尽量减小系统的稳态误差,或使稳态误差小于某一容许值。
只有当系统稳定时,研究稳态误差才有意义。
把在阶跃函数作用下没有原理性稳态误差的系统,称为无差系统。
而把具有原理性稳态误差的系统,称为有差系统。
非线性因素所引起的系统稳态误差,则称为附加稳态误差,或结构性稳态误差。
相关概念
- 稳态:时间 t 趋于无穷大时系统的输出状态。
- 误差:系统实际输出与期望输出之差。
- 稳态误差:对于稳定的系统,暂态响应随时间的增长而衰减,当衰减到可以忽略的程度时,则希望的稳态响应与实际的稳态响应之差称为稳态误差。稳态误差是系统达到稳态时,系统精度的度量。
稳态误差定义
e s s ( ∞ ) = lim t → ∞ ε ( t ) = lim t → ∞ ( c 0 ( t ) − c ( t ) ) e_{ss}(\infty)=\lim_{t\to\infty}\varepsilon(t)=\lim_{t\to\infty}(c_0(t)-c(t)) ess(∞)=t→∞limε(t)=t→∞lim(c0(t)−c(t))
因系统的输入可分为给定和扰动输入,所以稳态误差也可分为给定稳态误差和扰动稳态误差。
- 对于随动系统,给定的参考输入是变化的,要求输出严格跟随输入(给定)的变化,则其响应的希望值就是给定的参考输入值。所以,一般以系统的给定稳态误差去衡量随动系统的稳态性能。
- 对于恒值调节系统,一般给定不变,主要考虑扰动的作用。所以,一般以扰动稳态误差去衡量恒值调节系统的稳态性能。
-
误差:是从系统输出端来定义,它定义为系统输出量的希望值与实际值之差:
ε ( s ) = C 0 ( s ) − C ( s ) \varepsilon(s)=C_0(s)-C(s) ε(s)=C0(s)−C(s) -
偏差:是在系统输入端来定义,定义为系统给定量与反馈量之差:
E ( s ) = R ( s ) − B ( s ) = H ( s ) ε ( s ) E(s)=R(s)-B(s)=H(s)\varepsilon(s) E(s)=R(s)−B(s)=H(s)ε(s)
偏差值与误差值的差别为H(s),对于单位反馈系统,偏差与误差的值是一样的。
一般地用偏差代替误差:
ε s s ( ∞ ) = e s s ( ∞ ) = lim t → ∞ e ( t ) = lim t → ∞ ( r ( t ) − b ( t ) ) \varepsilon_{ss}(\infty)=e_{ss}(\infty)=\lim_{t\to\infty}e(t)=\lim_{t\to\infty}(r(t)-b(t)) εss(∞)=ess(∞)=t→∞lime(t)=t→∞lim(r(t)−b(t))
- 在误差信号 e ( t ) e(t) e(t) 中,包含瞬态分量 e t s ( t ) e_{ts}(t) ets(t) 和稳态分量 e s s ( t ) e_{ss}(t) ess(t) 两部分。
- 由于系统必须稳定,故当时间趋于无穷时,必有 e t s ( t ) e_{ts}(t) ets(t) 趋于零。
- 因而,控制系统的稳态误差(终值)定义为:误差信号 e ( t ) e(t) e(t) 的稳态分量 e s s ( ∞ ) e_{ss}(\infty) ess(∞),常以 e s s e_{ss} ess 简单标志。
如果有理函数 s E ( s ) sE(s) sE(s) 除在原点处有惟一的极点外,在 s 右半平面及虚轴上处处解析(即不存在极点),即 s E ( s ) sE(s) sE(s) 的极点均位于 s 左半平面(包括坐标原点),则可根据拉氏变换的终值定理,方便地求出系统的稳态误差:
e s s ( ∞ ) = lim t → ∞ e ( t ) = lim s → 0 s E ( s ) e_{ss}(\infty)=\lim_{t\to\infty}e(t)=\lim_{s\to0}sE(s) ess(∞)=t→∞lime(t)=s→0limsE(s)
上式算出的稳态误差是误差信号 e ( t ) e(t) e(t) 的稳态分量 e s s ( t ) e_{ss}(t) ess(t) 在 t 趋于无穷时的数值,故有时称为终值误差或稳态误差终值,它不能反映 e ( t ) e(t) e(t) 时间 t 的完整变化规律,具有一定的局限性。
当输入信号形式一定时,系统是否存在稳态误差就取决于开环传递函数描述的系统结构。
在一般情况下,分子阶次为 m,分母阶次为 n 的开环传递函数 G k G_k Gk 可表示为:
G ( s ) = G ( s ) H ( s ) = k ∏ i = 1 m ( τ i s + 1 ) s v ∏ j = 1 n ( T j s + 1 ) ( n ≥ m ) G(s)=G(s)H(s)=\frac{k\prod_{i=1}^{m}(\tau_is+1)}{s^v\prod_{j=1}^{n}(T_js+1)}(n\ge{m}) G(s)=G(s)H(s)=sv∏j=1n(Tjs+1)k∏i=1m(τis+1)(n≥m)
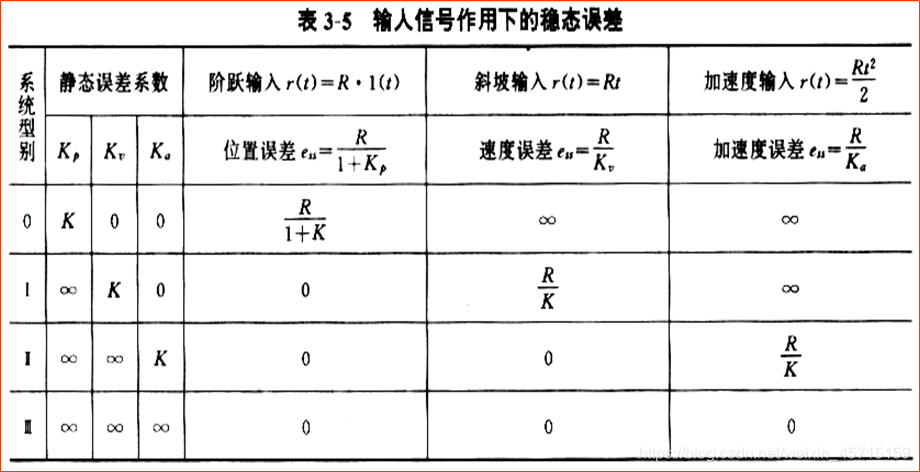
式中, K K K 为开环增益; τ i \tau_i τi 和 T j T_j Tj 为时间常数; v v v 为开环系统在 s 平面坐标原点上的极点的重数。现在的分类方法是以 v v v的数值来划分的: v = 0 v= 0 v=0 ,称为0型系统; v = 1 v=1 v=1 ,称为 I 型系统; v = 2 v=2 v=2 ,称为 II 型系统。当 v > 2 v>2 v>2 时,除复合控制系统外,使系统稳定是相当困难的。因此除航天控制系统外,III 型及III型以上的系统几乎不采用。
这种以开环系统在 s 平面坐标原点上的极点数来分类的方法,其优点在于:可以根据已知的输入信号形式迅速判断系统是否存在原理性稳态误差及稳态误差的大小。它与按系统的阶次进行分类的方法不同,阶次 m 与 n 的大小与系统的型别无关,且不影响稳态误差的数值。
误差系数
系统的静态位置误差系数 K p K_p Kp: k p = lim s → 0 G k ( s ) k_p=\lim_{s\to0}G_k(s) kp=lims→0Gk(s)
系统的静态速度误差系数 K v K_v Kv: k v = lim s → 0 s G k ( s ) k_v=\lim_{s\to0}sG_k(s) kv=lims→0sGk(s)
系统的静态加速度误差系数 K a K_a Ka: k a = lim s → 0 s 2 G k ( s ) k_a=\lim_{s\to0}s^2G_k(s) ka=lims→0s2Gk(s)
如果系统为非单位反馈系统,其 H ( s ) = K h H(s)=K_h H(s)=Kh 为常数,那么系统输出量的希望值为 R ′ s ) = R ( s ) / K h R's)=R(s)/K_h R′s)=R(s)/Kh,系统输出端的稳态位置误差为: e s s ′ = e s s / K h e'_{ss}=e_{ss}/K_h ess′=ess/Kh
给定稳态误差级数 (动态误差系数)
利用动态误差系数法,可以研究输入信号几乎为任意时间函数时的系统稳态误差变化,因此动态误差系数又称广义误差系数。为了求取动态误差系数,写出稳态误差信号的拉氏变换式: E ( s ) = Φ e ( s ) R ( s ) E(s)=\Phi_e(s)R(s) E(s)=Φe(s)R(s)
将误差传递函数在 Φ e ( s ) = 0 \Phi_e(s)=0 Φe(s)=0 的邻域内展成泰勒级数,得:
Φ e ( s ) = 1 1 + G ( s ) H ( s ) = Φ e ( 0 ) + Φ ˙ e ( 0 ) s + 1 2 ! Φ ¨ e ( 0 ) s 2 + ⋯ \Phi_e(s)=\frac{1}{1+G(s)H(s)}=\Phi_e(0)+\dot\Phi_e(0)s+\frac{1}{2!}\ddot\Phi_e(0)s^2+\cdots Φe(s)=1+G(s)H(s)1=Φe(0)+Φ˙e(0)s+2!1Φ¨e(0)s2+⋯
于是
E ( s ) = Φ e ( 0 ) R ( s ) + Φ ˙ e ( 0 ) s R ( s ) + 1 2 ! Φ ¨ e ( 0 ) s 2 R ( s ) + ⋯ + 1 l ! Φ e ( l ) ( 0 ) s l R ( s ) + ⋯ E(s)=\Phi_e(0)R(s)+\dot\Phi_e(0)sR(s)+\frac{1}{2!}\ddot\Phi_e(0)s^2R(s)+\cdots+\frac{1}{l!}\Phi_e^{(l)}(0)s^lR(s)+\cdots E(s)=Φe(0)R(s)+Φ˙e(0)sR(s)+2!1Φ¨e(0)s2R(s)+⋯+l!1Φe(l)(0)slR(s)+⋯
上述无穷级数收敛于 s=0 的邻域,称为给定输入作用下的稳态误差级数,相当于在时间域内 t → ∞ t\to\infty t→∞ 时成立。因此,当所有初始条件均为零时,对上式进行拉氏反变换,就得到作为时间函数的稳态误差表达式:
e s s ( t ) = ∑ i = 0 ∞ C i r ( i ) ( t ) C i = 1 i ! Φ e ( i ) ( 0 ) i = 0 , 1 , 2 , ⋯ e_{ss}(t)=\sum_{i=0}^{\infty}C_ir^{(i)}(t)\\ C_i=\frac{1}{i!}\Phi_e^{(i)}(0)\\ i=0,1,2,\cdots ess(t)=i=0∑∞Cir(i)(t)Ci=i!1Φe(i)(0)i=0,1,2,⋯
减小稳态误差
为了减小或消除系统在输入信号和扰动作用下的稳态误差,可以采取以下措施:
-
增大系统开环增益或扰动作用点之前系统的前向通道增益
增大系统开环增益 K K K 以后,对于 0 型系统,可以减小系统在阶跃输入时的位置误差;对于 I 型系统,可以减小系统在斜坡输入时的速度误差;对于 Ⅱ 型系统,可以减小系统在加速度输入时的加速度误差。
增大扰动点之后系统的前向通道增益,不能改变系统对扰动的稳态误差数值。
-
在系统的前向通道或主反馈通道设置串联积分环节
扰动作用点之前的前向通道积分环节数与主反馈通道积分环节数之和决定系统响应扰动作用的型别,该型别与扰动作用点之后前向通道的积分环节数无关。
反馈控制系统中,设置串联积分环节或增大开环增益以消除或减小稳态误差的措施,必然导致降低系统的稳定性,甚至造成系统不稳定,从而恶化系统的动态性能。
-
采用串级控制抑制内回路扰动
当控制系统中存在多个扰动信号,且控制精度要求较高时,宜采用串级控制方式,可以显著抑制内回路的扰动影响。
-
采用复合控制方法
复合控制系统是在系统的反馈控制回路中加入前馈通路,组成一个前馈控制与反馈控制相结合的系统。