本博文基于自动控制原理习题解析(胡寿松第二版),解答经典习题,总结解题规律,便于同学们的复习,该篇属于自动控制原理的习题篇,以习题为驱动,不做只懂理论不懂解题的人,因作者也是在复习考研,也是刚毕业的大学生,总结的东西难免会有所纰漏,如发现,请在评论区提醒,望共同进步,考研成功上岸!
- 题目:试求下面系统的单位脉冲响应 c ( t ) c(t) c(t)和单位阶跃响应 c ( t ) c(t) c(t),已知全部初始条件为零。
0.04 c ¨ ( t ) + 0.24 c ˙ ( t ) + c ( t ) = r ( t ) 0.04\ddot{c}(t)+0.24\dot{c}(t)+c(t)=r(t) 0.04c¨(t)+0.24c˙(t)+c(t)=r(t)
考点分析:此类问题解决方法:先利用拉氏变换将微分方程转换为系统的传递函数,然后根据拉氏反变换求得系统的各类响应。
解:
由于初始条件为零,对微分方程两边进行拉氏变换可得:
0.04 s 2 C ( s ) + 0.24 s C ( s ) + C ( s ) = R ( s ) 0.04s^2C(s)+0.24sC(s)+C(s)=R(s) 0.04s2C(s)+0.24sC(s)+C(s)=R(s)
则系统的传递函数为:
Φ ( s ) = C ( s ) R ( s ) = 1 0.04 s 2 + 0.24 s + 1 = 25 s 2 + 6 s + 25 \Phi(s)=\frac{C(s)}{R(s)}=\frac{1}{0.04s^2+0.24s+1}=\frac{25}{s^2+6s+25} Φ(s)=R(s)C(s)=0.04s2+0.24s+11=s2+6s+2525
由 Φ ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 的 形 式 可 以 确 定 : 由\Phi(s)=\frac{\omega_n^2}{s^2+2\zeta\omega_n{s}+\omega_n^2}的形式可以确定: 由Φ(s)=s2+2ζωns+ωn2ωn2的形式可以确定:
ω n 2 = 25 , 2 ζ ω n = 6 \omega_n^2=25,2\zeta\omega_n=6 ωn2=25,2ζωn=6
则 ω n = 5 , ζ = 0.6 , ω d = ω n 1 − ζ 2 = 4 , β = arctan ( 1 − ζ 2 ζ ) = 53.2 ° 则\omega_n=5,\zeta=0.6,\omega_d=\omega_n\sqrt{1-\zeta^2}=4,\beta=\arctan(\frac{\sqrt{1-\zeta^2}}{\zeta})=53.2° 则ωn=5,ζ=0.6,ωd=ωn1−ζ2=4,β=arctan(ζ1−ζ2)=53.2°
当输入为单位脉冲信号时, R ( s ) = 1 R(s)=1 R(s)=1,系统的单位脉冲响应:
c ( t ) = ω n 1 − ζ 2 e − ζ ω n t sin ω d t = 6.25 e − 3 t sin 4 t , ( t ≥ 0 ) c(t)=\frac{\omega_n}{\sqrt{1-\zeta^2}}e^{-\zeta\omega_nt}\sin{\omega_dt}=6.25e^{-3t}\sin4t,(t≥0) c(t)=1−ζ2ωne−ζωntsinωdt=6.25e−3tsin4t,(t≥0)
当输入为单位阶跃信号时, R ( s ) = 1 s R(s)=\frac{1}{s} R(s)=s1,系统的单位阶跃响应为:
c ( t ) = 1 − 1 1 − ζ 2 e − ζ ω n t sin ( ω d t + β ) = 1 − 1.25 e − 3 t sin ( 4 t + 53.2 ° ) , ( t ≥ 0 ) c(t)=1-\frac{1}{\sqrt{1-\zeta^2}}e^{-\zeta\omega_nt}\sin{(\omega_dt+\beta)}=1-1.25e^{-3t}\sin(4t+53.2°),(t≥0) c(t)=1−1−ζ21e−ζωntsin(ωdt+β)=1−1.25e−3tsin(4t+53.2°),(t≥0)
- 题目:已知二阶系统的单位阶跃响应为: c ( t ) = 10 − 12.5 e − 1.2 t sin ( 1.6 t + 53.1 ° ) c(t)=10-12.5e^{-1.2t}\sin(1.6t+53.1°) c(t)=10−12.5e−1.2tsin(1.6t+53.1°),试求系统的超调量 σ % \sigma\% σ%、峰值时间 t p t_p tp和调节时间 t s t_s ts。
考点分析:此类问题的解决方法:将二阶系统的单位阶跃响应的表达式与标准的表达式比较,解得系统的自然频率和阻尼比,然后运用这些参数计算动态性能指标。
解:
本题二阶系统的单位阶跃响应为:
c ( t ) = 10 − 12.5 e − 1.2 t sin ( 1.6 t + 53.1 ° ) = 10 [ 1 − 1.25 e − 1.2 t sin ( 1.6 t + 53.1 ° ) ] c(t)=10-12.5e^{-1.2t}\sin(1.6t+53.1°)=10[1-1.25e^{-1.2t}\sin{(1.6t+53.1°)}] c(t)=10−12.5e−1.2tsin(1.6t+53.1°)=10[1−1.25e−1.2tsin(1.6t+53.1°)]
由上式知,该二阶系统的放大系数是10,但放大系数不影响系统的动态性能,标准的二阶系统的单位阶跃响应为:
c ( t ) = 1 − 1 1 − ζ 2 e − ζ ω n t sin ( ω n 1 − ζ 2 t + β ) c(t)=1-\frac{1}{\sqrt{1-\zeta^2}}e^{-\zeta\omega_nt}\sin(\omega_n\sqrt{1-\zeta^2}t+\beta) c(t)=1−1−ζ21e−ζωntsin(ωn1−ζ2t+β)
则有:
ζ ω n = 1.2 , 1 1 − ζ 2 = 1.25 , ω n 1 − ζ 2 = 1.6 , β = arccos ζ = 53.1 ° \zeta\omega_n=1.2,\frac{1}{\sqrt{1-\zeta^2}}=1.25,\omega_n\sqrt{1-\zeta^2}=1.6,\beta=\arccos\zeta=53.1° ζωn=1.2,1−ζ21=1.25,ωn1−ζ2=1.6,β=arccosζ=53.1°
解得:
ζ = 0.6 , ω n = 2 \zeta=0.6,\omega_n=2 ζ=0.6,ωn=2
由于 0 < ζ < 1 0<\zeta<1 0<ζ<1,因此该系统为欠阻尼二阶系统,其动态性能指标为:
超 调 量 : σ % = e − π ζ 1 − ζ 2 × 100 % = 9.5 % 超调量:\sigma\%=e^{-\pi\zeta\sqrt{1-\zeta^2}}\times100\%=9.5\% 超调量:σ%=e−πζ1−ζ2×100%=9.5%
峰 值 时 间 : t p = π ω n 1 − ζ 2 = π 2 × 0.8 = 1.96 s 峰值时间:t_p=\frac{\pi}{\omega_n\sqrt{1-\zeta^2}}=\frac{\pi}{2\times0.8}=1.96s 峰值时间:tp=ωn1−ζ2π=2×0.8π=1.96s
调 节 时 间 : t s = 3.5 ζ ω n = 3.5 1.2 = 2.92 s , ( Δ = 5 % ) 调节时间:t_s=\frac{3.5}{\zeta\omega_n}=\frac{3.5}{1.2}=2.92s,(\Delta=5\%) 调节时间:ts=ζωn3.5=1.23.5=2.92s,(Δ=5%)
- 题目:设单位反馈系统的开环传递函数为: G ( s ) = 0.4 s + 1 s ( s + 0.6 ) G(s)=\frac{0.4s+1}{s(s+0.6)} G(s)=s(s+0.6)0.4s+1,试求系统在单位阶跃输入下的动态性能。
解:
由开环传递函数可得系统的闭环传递函数为:
Φ ( s ) = G ( s ) 1 + G ( s ) = 0.4 ( s + 2.5 ) s 2 + s + 1 \Phi(s)=\frac{G(s)}{1+G(s)}=\frac{0.4(s+2.5)}{s^2+s+1} Φ(s)=1+G(s)G(s)=s2+s+10.4(s+2.5)
从 Φ ( s ) 的 形 式 看 , 该 系 统 是 比 例 − 微 分 控 制 二 阶 系 统 , 其 标 准 形 式 为 : 从\Phi(s)的形式看,该系统是比例-微分控制二阶系统,其标准形式为: 从Φ(s)的形式看,该系统是比例−微分控制二阶系统,其标准形式为:
Φ ( s ) = ω n 2 z ⋅ s + z s 2 + 2 ζ d ω n s + ω n 2 \Phi(s)=\frac{\omega_n^2}{z}·\frac{s+z}{s^2+2\zeta_d\omega_ns+\omega_n^2} Φ(s)=zωn2⋅s2+2ζdωns+ωn2s+z
由
0.4 s + 1 s 2 + s + 1 = ω n 2 z ⋅ s + z s 2 + 2 ζ d ω n s + ω n 2 \frac{0.4s+1}{s^2+s+1}=\frac{\omega_n^2}{z}·\frac{s+z}{s^2+2\zeta_d\omega_ns+\omega_n^2} s2+s+10.4s+1=zωn2⋅s2+2ζdωns+ωn2s+z
可得:
z = 2.5 , ω n = 1 , ζ d = 0.5 z=2.5,\omega_n=1,\zeta_d=0.5 z=2.5,ωn=1,ζd=0.5
由于:
r = z 2 − 2 ζ d ω n z + ω n 2 z 1 − ζ d 2 = 1.007 r=\frac{\sqrt{z^2-2\zeta_d\omega_nz+\omega_n^2}}{z\sqrt{1-\zeta_d^2}}=1.007 r=z1−ζd2z2−2ζdωnz+ωn2=1.007
ψ = − π + arctan ( ω n 1 − ζ d 2 z − ζ d ω n ) + arctan ( 1 − ζ d 2 ζ d ) = − 1.686 \psi=-\pi+\arctan(\frac{\omega_n\sqrt{1-\zeta_d^2}}{z-\zeta_d\omega_n})+\arctan(\frac{\sqrt{1-\zeta_d^2}}{\zeta_d})=-1.686 ψ=−π+arctan(z−ζdωnωn1−ζd2)+arctan(ζd1−ζd2)=−1.686
β d = arctan ( 1 − ζ d 2 ζ d ) = 1.047 \beta_d=\arctan(\frac{\sqrt{1-\zeta_d^2}}{\zeta_d})=1.047 βd=arctan(ζd1−ζd2)=1.047
动态性能指标为:
峰 值 时 间 : t p = β d − ψ ω n 1 − ζ d 2 = 3.156 s ; 峰值时间:t_p=\frac{\beta_d-\psi}{\omega_n\sqrt{1-\zeta_d^2}}=3.156s; 峰值时间:tp=ωn1−ζd2βd−ψ=3.156s;
超 调 量 : σ % = r 1 − ζ d 2 e − ζ d ω n t p × 100 % = 18.0 % 超调量:\sigma\%=r\sqrt{1-\zeta_d^2}e^{-\zeta_d\omega_nt_p}\times100\%=18.0\% 超调量:σ%=r1−ζd2e−ζdωntp×100%=18.0%
调 节 时 间 : t s = 4 + 1 2 ln ( z 2 − 2 ζ d ω n z + ω n 2 ) − ln z − 1 2 ln ( 1 − ζ d 2 ) ζ d ω n = 4 + ln r ζ d ω n = 8.01 s , ( Δ = 0.02 ) 调节时间:t_s=\frac{4+\frac{1}{2}\ln(z^2-2\zeta_d\omega_n{z}+\omega_n^2)-\ln{z}-\frac{1}{2}\ln(1-\zeta_d^2)}{\zeta_d\omega_n}=\frac{4+\ln{r}}{\zeta_d\omega_n}=8.01s,(\Delta=0.02) 调节时间:ts=ζdωn4+21ln(z2−2ζdωnz+ωn2)−lnz−21ln(1−ζd2)=ζdωn4+lnr=8.01s,(Δ=0.02)
- 题目:已知控制系统的单位阶跃响应为: c ( t ) = 1 + 0.2 e − 60 t − 1.2 e − 10 t c(t)=1+0.2e^{-60t}-1.2e^{-10t} c(t)=1+0.2e−60t−1.2e−10t,试确定系统的阻尼比 ζ \zeta ζ和自然频率 ω n \omega_n ωn。
考点分析:要确定系统的阻尼比和自然频率,可以通过系统的闭环传递函数获得,系统的闭环传递函数是单位脉冲响应的拉氏变换,已知条件为系统的单位阶跃响应,可以将其微分得到单位脉冲响应,可求得结果。
解:
系统的单位脉冲响应为:
c ( t ) = − 12 e − 60 t + 12 e − 10 t = 12 ( e − 10 t − e − 60 t ) c(t)=-12e^{-60t}+12e^{-10t}=12(e^{-10t}-e^{-60t}) c(t)=−12e−60t+12e−10t=12(e−10t−e−60t)
系统的闭环传递函数为:
Φ ( s ) = L [ c ( t ) ] = 12 ( 1 s + 10 − 1 s + 60 ) = 600 s 2 + 70 s + 600 = ω n 2 s 2 + 2 ζ ω n s + ω n 2 \Phi(s)=L[c(t)]=12(\frac{1}{s+10}-\frac{1}{s+60})=\frac{600}{s^2+70s+600}=\frac{\omega_n^2}{s^2+2\zeta\omega_ns+\omega_n^2} Φ(s)=L[c(t)]=12(s+101−s+601)=s2+70s+600600=s2+2ζωns+ωn2ωn2
则系统的自然频率和阻尼比为:
ω n = 600 = 24.5 , ζ = 70 2 × 600 = 1.43 \omega_n=\sqrt{600}=24.5,\zeta=\frac{70}{2\times\sqrt{600}}=1.43 ωn=600=24.5,ζ=2×60070=1.43
- 题目:试求下列各系统的自然频率和阻尼比,并列表比较其动态性能。

考点分析:由结构图求传递函数,并求系统动态性能。
解:
图a系统,由图可知,闭环传递函数为:
Φ a ( s ) = 1 s 2 + 1 \Phi_a(s)=\frac{1}{s^2+1} Φa(s)=s2+11
此 时 , 系 统 的 自 然 频 率 ω n = 1 , 阻 尼 比 ζ = 0 , 系 统 为 零 阻 尼 系 统 , 其 单 位 阶 跃 响 应 为 : 此时,系统的自然频率\omega_n=1,阻尼比\zeta=0,系统为零阻尼系统,其单位阶跃响应为: 此时,系统的自然频率ωn=1,阻尼比ζ=0,系统为零阻尼系统,其单位阶跃响应为:
c ( t ) = 1 − cos ω n t = 1 − cos t c(t)=1-\cos\omega_nt=1-\cos{t} c(t)=1−cosωnt=1−cost
因
d c ( t ) d t ∣ t = t p = sin t p = 0 , ( t p = 0 , π , 2 π , … ) \frac{dc(t)}{dt}|_{t=t_p}=\sin{t_p}=0,(t_p=0,\pi,2\pi,\dots) dtdc(t)∣t=tp=sintp=0,(tp=0,π,2π,…)
取
t p = π = 3.142 s t_p=\pi=3.142s tp=π=3.142s
而
c ( t p ) = 1 − cos t p = 2 c(t_p)=1-\cos{t_p}=2 c(tp)=1−costp=2
因此,
σ % = c ( t p ) − c ( ∞ ) c ( ∞ ) = 100 % \sigma\%=\frac{c(t_p)-c(\infty)}{c(\infty)}=100\% σ%=c(∞)c(tp)−c(∞)=100%
对 于 等 幅 振 荡 的 无 阻 尼 系 统 , t s 不 存 在 , 也 没 有 意 义 。 对于等幅振荡的无阻尼系统,t_s不存在,也没有意义。 对于等幅振荡的无阻尼系统,ts不存在,也没有意义。
图b系统,由图可知,闭环传递函数为:
Φ b ( s ) = s + 1 s 2 + s + 1 \Phi_b(s)=\frac{s+1}{s^2+s+1} Φb(s)=s2+s+1s+1
从 Φ b ( s ) 的 形 式 可 以 看 出 , 该 系 统 是 比 例 − 微 分 控 制 二 阶 系 统 , 其 标 准 形 式 为 : 从\Phi_b(s)的形式可以看出,该系统是比例-微分控制二阶系统,其标准形式为: 从Φb(s)的形式可以看出,该系统是比例−微分控制二阶系统,其标准形式为:
Φ ( s ) = ω n 2 z ⋅ s + z s 2 + 2 ζ d ω n s + ω n 2 \Phi(s)=\frac{\omega_n^2}{z}·\frac{s+z}{s^2+2\zeta_d\omega_ns+\omega_n^2} Φ(s)=zωn2⋅s2+2ζdωns+ωn2s+z
可 得 : z = 1 , ω n = 1 , ζ d = 0.5 可得:z=1,\omega_n=1,\zeta_d=0.5 可得:z=1,ωn=1,ζd=0.5
由 于 : 由于: 由于:
r = z 2 − 2 ζ d ω n z + ω n 2 z 1 − ζ d 2 = 1.155 r=\frac{\sqrt{z^2-2\zeta_d\omega_nz+\omega_n^2}}{z\sqrt{1-\zeta_d^2}}=1.155 r=z1−ζd2z2−2ζdωnz+ωn2=1.155
ψ = − π + arctan ( ω n 1 − ζ d 2 z − ζ d ω n ) + arctan ( 1 − ζ d 2 ζ d ) = − 60 ° \psi=-\pi+\arctan(\frac{\omega_n\sqrt{1-\zeta_d^2}}{z-\zeta_d\omega_n})+\arctan(\frac{\sqrt{1-\zeta_d^2}}{\zeta_d})=-60° ψ=−π+arctan(z−ζdωnωn1−ζd2)+arctan(ζd1−ζd2)=−60°
β d = arctan ( 1 − ζ d 2 ζ d ) = 60 ° \beta_d=\arctan(\frac{\sqrt{1-\zeta_d^2}}{\zeta_d})=60° βd=arctan(ζd1−ζd2)=60°
动 态 性 能 指 标 为 : 动态性能指标为: 动态性能指标为:
峰 值 时 间 : t p = β d − ψ ω n 1 − ζ d 2 = 2.418 s ; 峰值时间:t_p=\frac{\beta_d-\psi}{\omega_n\sqrt{1-\zeta_d^2}}=2.418s; 峰值时间:tp=ωn1−ζd2βd−ψ=2.418s;
超 调 量 : σ % = r 1 − ζ d 2 e − ζ d ω n t p × 100 % = 29.9 % 超调量:\sigma\%=r\sqrt{1-\zeta_d^2}e^{-\zeta_d\omega_nt_p}\times100\%=29.9\% 超调量:σ%=r1−ζd2e−ζdωntp×100%=29.9%
调 节 时 间 : t s = 4 + ln r ζ d ω n = 8.3 s , ( Δ = 0.02 ) 调节时间:t_s=\frac{4+\ln{r}}{\zeta_d\omega_n}=8.3s,(\Delta=0.02) 调节时间:ts=ζdωn4+lnr=8.3s,(Δ=0.02)
图c系统,由图可知,闭环传递函数为:
Φ c ( s ) = 1 s 2 + s + 1 \Phi_c(s)=\frac{1}{s^2+s+1} Φc(s)=s2+s+11
此 时 , 系 统 的 自 然 频 率 ω n = 1 , 阻 尼 比 ζ = 0.5 , 则 系 统 性 能 指 标 为 : 此时,系统的自然频率\omega_n=1,阻尼比\zeta=0.5,则系统性能指标为: 此时,系统的自然频率ωn=1,阻尼比ζ=0.5,则系统性能指标为:
超 调 量 : σ % = e − π ζ / 1 − ζ 2 × 100 % = 16.3 % 超调量:\sigma\%=e^{-\pi\zeta/\sqrt{1-\zeta^2}}\times100\%=16.3\% 超调量:σ%=e−πζ/1−ζ2×100%=16.3%
峰 值 时 间 : t p = π ω 1 − ζ 2 = 3.628 s 峰值时间:t_p=\frac{\pi}{\omega\sqrt{1-\zeta^2}}=3.628s 峰值时间:tp=ω1−ζ2π=3.628s
调 节 时 间 : t s = 4.4 ζ ω n = 8.8 s , ( Δ = 2 % ) 调节时间:t_s=\frac{4.4}{\zeta\omega_n}=8.8s,(\Delta=2\%) 调节时间:ts=ζωn4.4=8.8s,(Δ=2%)
性 能 指 标 比 较 如 下 : 性能指标比较如下: 性能指标比较如下:
| 性能/系统 | ( a ) (a) (a) | ( b ) (b) (b) | ( c ) (c) (c) |
|---|---|---|---|
| ω n \omega_n ωn | 1 | 1 | 1 |
| ζ \zeta ζ | 0 | 0.5 | 0.5 |
| t p / s t_p/s tp/s | 3.142 | 2.418 | 3.628 |
| σ / % \sigma/\% σ/% | 100 | 29.9 | 16.3 |
| t s / s t_s/s ts/s | — | 8.3 | 8.8 |
- 题目:下图所示控制系统有两种不同的结构方案,其中 T > 0 T>0 T>0不可变,要求:
(1) 在这两种方案中,应如何调整 K 1 、 K 2 、 K 3 K_1、K_2、K_3 K1、K2、K3,才能使系统获得较好的动态性能?
(2) 比较说明两种结构方案的特点。

考点分析:利用测速反馈和比例-微分控制控制来改善二阶系统的动态性能。
解:
为 了 方 便 讨 论 , 假 设 T = 1 为了方便讨论,假设T=1 为了方便讨论,假设T=1。
原 系 统 , 即 K 3 = 0 : 原系统,即K_3=0: 原系统,即K3=0:
开 环 传 递 函 数 为 : 开环传递函数为: 开环传递函数为:
G 0 ( s ) = K 1 K 2 s 2 + s G_0(s)=\frac{K_1K_2}{s^2+s} G0(s)=s2+sK1K2
闭 环 传 递 函 数 为 : 闭环传递函数为: 闭环传递函数为:
Φ 0 ( s ) = K 1 K 2 s + s + K 1 K 2 \Phi_0(s)=\frac{K_1K_2}{s+s+K_1K_2} Φ0(s)=s+s+K1K2K1K2
方 案 a 测 速 反 馈 控 制 系 统 : 方案a测速反馈控制系统: 方案a测速反馈控制系统:
开 环 传 递 函 数 为 : 开环传递函数为: 开环传递函数为:
G a ( s ) = K 1 K 2 s 2 + ( 1 + K 2 K 3 ) s G_a(s)=\frac{K_1K_2}{s^2+(1+K_2K_3)s} Ga(s)=s2+(1+K2K3)sK1K2
闭 环 传 递 函 数 为 : 闭环传递函数为: 闭环传递函数为:
Φ a ( s ) = K 1 K 2 s 2 + ( 1 + K 2 K 3 ) s + K 1 K 2 \Phi_a(s)=\frac{K_1K_2}{s^2+(1+K_2K_3)s+K_1K_2} Φa(s)=s2+(1+K2K3)s+K1K2K1K2
方 案 b 比 例 − 微 分 控 制 系 统 : 方案b比例-微分控制系统: 方案b比例−微分控制系统:
开 环 传 递 函 数 为 : 开环传递函数为: 开环传递函数为:
G b ( s ) = K 2 K 3 s + K 1 K 2 s 2 + s G_b(s)=\frac{K_2K_3s+K_1K_2}{s^2+s} Gb(s)=s2+sK2K3s+K1K2
闭 环 传 递 函 数 为 : 闭环传递函数为: 闭环传递函数为:
Φ a ( s ) = G b ( s ) = K 2 K 3 s + K 1 K 2 s 2 + ( 1 + K 2 K 3 ) s + K 1 K 2 \Phi_a(s)=G_b(s)=\frac{K_2K_3s+K_1K_2}{s^2+(1+K_2K_3)s+K_1K_2} Φa(s)=Gb(s)=s2+(1+K2K3)s+K1K2K2K3s+K1K2
由 三 者 的 开 环 传 递 函 数 可 知 , 原 系 统 、 测 速 反 馈 控 制 系 统 与 比 例 − 微 分 控 制 系 统 均 为 Ⅰ 型 系 统 , 其 静 态 速 度 误 差 系 数 分 别 为 : 由三者的开环传递函数可知,原系统、测速反馈控制系统与比例-微分控制系统均为Ⅰ型系统,其静态速度误差系数分别为: 由三者的开环传递函数可知,原系统、测速反馈控制系统与比例−微分控制系统均为Ⅰ型系统,其静态速度误差系数分别为:
K v 0 = K 1 K 2 , K v a = K 1 K 2 1 + K 2 K 3 , k v b = K 1 K 2 K_{v0}=K_1K_2,K_{va}=\frac{K_1K_2}{1+K_2K_3},k_{vb}=K_1K_2 Kv0=K1K2,Kva=1+K2K3K1K2,kvb=K1K2
( 1 ) 参 数 调 整 措 施 。 (1) 参数调整措施。 (1)参数调整措施。
方 案 ( a ) 测 速 反 馈 控 制 系 统 : 在 原 有 系 统 中 引 入 速 度 反 馈 , 在 不 影 响 系 统 的 自 然 频 率 的 同 时 可 以 增 大 系 统 的 阻 尼 比 , 达 到 改 善 系 统 动 态 性 能 的 目 的 , 如 减 小 超 调 量 、 加 快 调 节 时 间 等 。 测 速 反 馈 系 数 K 3 的 选 择 , 要 使 阻 尼 比 在 0.4 ~ 0.8 之 间 , 从 而 满 足 给 定 的 各 项 动 态 性 能 指 标 , 但 是 , 测 速 反 馈 会 降 低 系 统 的 开 环 增 益 , 从 而 加 大 系 统 在 斜 坡 输 入 时 的 稳 态 误 差 , 因 此 必 须 考 虑 加 大 原 系 统 的 开 环 增 益 , 然 而 , 增 加 K 1 又 会 导 致 阻 尼 比 下 降 , 从 而 使 超 调 量 加 大 , 此 时 应 该 增 加 K 2 。 方案(a) 测速反馈控制系统:在原有系统中引入速度反馈,在不影响系统的自然频率的同时可以增大系统的阻尼比,\\达到改善系统动态性能的目的,如减小超调量、加快调节时间等。测速反馈系数K_3的选择,要使阻尼比在0.4~0.8之间,\\从而满足给定的各项动态性能指标,但是,测速反馈会降低系统的开环增益,从而加大系统在斜坡输入时的稳态误差,\\因此必须考虑加大原系统的开环增益,然而,增加K_1又会导致阻尼比下降,从而使超调量加大,此时应该增加K_2。 方案(a)测速反馈控制系统:在原有系统中引入速度反馈,在不影响系统的自然频率的同时可以增大系统的阻尼比,达到改善系统动态性能的目的,如减小超调量、加快调节时间等。测速反馈系数K3的选择,要使阻尼比在0.4~0.8之间,从而满足给定的各项动态性能指标,但是,测速反馈会降低系统的开环增益,从而加大系统在斜坡输入时的稳态误差,因此必须考虑加大原系统的开环增益,然而,增加K1又会导致阻尼比下降,从而使超调量加大,此时应该增加K2。
方 案 ( b ) 比 例 — 微 分 控 制 系 统 : 比 例 — 微 分 控 制 可 以 增 大 系 统 的 阻 尼 比 , 使 超 调 量 下 降 , 调 节 时 间 缩 短 , 且 不 影 响 系 统 的 自 然 频 率 和 常 值 稳 态 误 差 。 由 于 采 用 微 分 控 制 后 , 允 许 选 取 较 高 的 开 环 增 益 , 因 此 保 证 一 定 的 动 态 性 能 条 件 下 , 可 以 减 小 稳 态 误 差 。 然 而 , 增 加 K 1 又 会 导 致 阻 尼 比 下 降 , 从 而 超 调 量 加 大 , 此 时 应 该 考 虑 增 加 K 2 方案(b) 比例—微分控制系统:比例—微分控制可以增大系统的阻尼比,使超调量下降,调节时间缩短,且不影响系统的自然频率和常值稳态误差。\\由于采用微分控制后,允许选取较高的开环增益,因此保证一定的动态性能条件下,可以减小稳态误差。\\然而,增加K_1又会导致阻尼比下降,从而超调量加大,此时应该考虑增加K_2 方案(b)比例—微分控制系统:比例—微分控制可以增大系统的阻尼比,使超调量下降,调节时间缩短,且不影响系统的自然频率和常值稳态误差。由于采用微分控制后,允许选取较高的开环增益,因此保证一定的动态性能条件下,可以减小稳态误差。然而,增加K1又会导致阻尼比下降,从而超调量加大,此时应该考虑增加K2。
( 2 ) 方 案 特 点 。 (2) 方案特点。 (2)方案特点。
a . 测 速 反 馈 控 制 与 比 例 − 微 分 控 制 都 可 以 改 善 二 阶 系 统 的 动 态 性 能 ; a.测速反馈控制与比例-微分控制都可以改善二阶系统的动态性能; a.测速反馈控制与比例−微分控制都可以改善二阶系统的动态性能;
b . 比 例 − 微 分 控 制 对 系 统 的 开 环 增 益 和 自 然 频 率 均 无 影 响 , 测 速 反 馈 控 制 虽 不 影 响 自 然 频 率 , 但 会 降 低 开 环 增 益 。 因 此 , 对 于 确 定 的 常 值 稳 态 误 差 , 测 速 反 馈 控 制 要 求 有 较 大 的 开 环 增 益 ; b.比例-微分控制对系统的开环增益和自然频率均无影响,测速反馈控制虽不影响自然频率,\\但会降低开环增益。因此,对于确定的常值稳态误差,测速反馈控制要求有较大的开环增益; b.比例−微分控制对系统的开环增益和自然频率均无影响,测速反馈控制虽不影响自然频率,但会降低开环增益。因此,对于确定的常值稳态误差,测速反馈控制要求有较大的开环增益;
c . 比 例 − 微 分 控 制 的 阻 尼 作 用 产 生 于 系 统 的 输 入 端 误 差 信 号 的 速 度 , 而 测 速 反 馈 控 制 的 阻 尼 作 用 来 源 于 系 统 输 出 端 的 响 应 的 速 度 , 因 此 , 对 于 给 定 的 开 环 增 益 和 指 令 输 入 速 度 , 后 者 对 应 较 大 的 稳 态 误 差 值 ; c.比例-微分控制的阻尼作用产生于系统的输入端误差信号的速度,\\而测速反馈控制的阻尼作用来源于系统输出端的响应的速度,\\因此,对于给定的开环增益和指令输入速度,后者对应较大的稳态误差值; c.比例−微分控制的阻尼作用产生于系统的输入端误差信号的速度,而测速反馈控制的阻尼作用来源于系统输出端的响应的速度,因此,对于给定的开环增益和指令输入速度,后者对应较大的稳态误差值;
d . 比 例 − 微 分 控 制 对 噪 声 有 明 显 的 放 大 作 用 , 当 系 统 输 入 端 噪 声 严 重 时 , 一 般 不 宜 选 用 比 例 − 微 分 控 制 , 测 速 反 馈 控 制 对 系 统 输 入 端 噪 声 有 滤 波 作 用 。 d.比例-微分控制对噪声有明显的放大作用,当系统输入端噪声严重时,一般不宜选用比例-微分控制,测速反馈控制对系统输入端噪声有滤波作用。 d.比例−微分控制对噪声有明显的放大作用,当系统输入端噪声严重时,一般不宜选用比例−微分控制,测速反馈控制对系统输入端噪声有滤波作用。
- 题目:已知系统的特征方程如下,试求系统在 s s s右半平面的根数及虚根值。
s 6 + 4 s 5 − 4 s 4 + 4 s 3 − 7 s 2 − 8 s + 10 = 0 s^6+4s^5-4s^4+4s^3-7s^2-8s+10=0 s6+4s5−4s4+4s3−7s2−8s+10=0
考点分析:劳斯判据的特殊情况。
解:
劳斯表如下:
| s 6 s^6 s6 | 1 | -4 | -7 | 10 |
|---|---|---|---|---|
| s 5 s^5 s5 | 4 | 4 | -8 | |
| s 4 s^4 s4 | -5 | -5 | 10 | ( 辅 助 方 程 F ( s ) = − 5 s 4 − 5 s 2 + 10 = 0 的 系 数 辅助方程F(s)=-5s^4-5s^2+10=0的系数 辅助方程F(s)=−5s4−5s2+10=0的系数) |
| s 3 s^3 s3 | 0(-20) | 0(-10) | ( d F ( s ) / d s = − 20 s 3 − 10 s = 0 的 系 数 (dF(s)/ds=-20s^3-10s=0的系数 (dF(s)/ds=−20s3−10s=0的系数) | |
| s 2 s^2 s2 | -2.5 | 10 | ||
| s 1 s^1 s1 | -90 | |||
| s 0 s^0 s0 | 10 |
由 上 表 可 见 , 劳 斯 表 中 的 第 一 列 元 素 符 号 改 变 两 次 , 所 以 系 统 在 s 右 半 平 面 有 两 个 特 征 根 , 由 于 辅 助 方 程 − 5 s 4 − 5 s 2 + 10 = 0 的 解 为 s 1 , 2 = ± 2 j , s 3 , 4 = ± 1 , 因 此 系 统 的 一 对 虚 根 为 s 1 , 2 = ± 2 j 。 由上表可见,劳斯表中的第一列元素符号改变两次,所以系统在s右半平面有两个特征根,由于辅助方程-5s^4-5s^2+10=0的解为s_{1,2}=±\sqrt{2}j,s_{3,4}=±1,因此系统的一对虚根为s_{1,2}=±\sqrt{2}j。 由上表可见,劳斯表中的第一列元素符号改变两次,所以系统在s右半平面有两个特征根,由于辅助方程−5s4−5s2+10=0的解为s1,2=±2j,s3,4=±1,因此系统的一对虚根为s1,2=±2j。
- 题目:已知单位负反馈系统的开环传递函数为:
G ( s ) = K ( 0.5 s + 1 ) s ( s + 1 ) ( 0.5 s 2 + s + 1 ) G(s)=\frac{K(0.5s+1)}{s(s+1)(0.5s^2+s+1)} G(s)=s(s+1)(0.5s2+s+1)K(0.5s+1)
试确定系统稳定的 K K K值范围。
考点分析:应用劳斯稳定判据确定参数取值范围。
解:
由 题 设 条 件 , 该 系 统 为 单 位 负 反 馈 系 统 , 根 据 开 环 传 递 函 数 列 出 闭 环 系 统 的 特 征 方 程 : 由题设条件,该系统为单位负反馈系统,根据开环传递函数列出闭环系统的特征方程: 由题设条件,该系统为单位负反馈系统,根据开环传递函数列出闭环系统的特征方程:
D ( s ) = s ( s + 1 ) ( 0.5 s 2 + s + 1 ) + K ( 0.5 s + 1 ) = s 4 + 3 s 3 + 4 s 2 + ( 2 + K ) s + 2 K = 0 D(s)=s(s+1)(0.5s^2+s+1)+K(0.5s+1)=s^4+3s^3+4s^2+(2+K)s+2K=0 D(s)=s(s+1)(0.5s2+s+1)+K(0.5s+1)=s4+3s3+4s2+(2+K)s+2K=0
劳 斯 表 如 下 : 劳斯表如下: 劳斯表如下:
| s 4 s^4 s4 | 1 | 4 | 2 K 2K 2K |
|---|---|---|---|
| s 3 s^3 s3 | 3 | 2 + K 2+K 2+K | |
| s 2 s^2 s2 | 10 − K 3 \frac{10-K}{3} 310−K | 2 K 2K 2K | |
| s 1 s^1 s1 | 20 − 10 K − K 2 ( 10 − K ) \frac{20-10K-K^2}{(10-K)} (10−K)20−10K−K2 | ||
| s 0 s^0 s0 | 2 K 2K 2K |
根 据 劳 斯 稳 定 判 据 可 得 , 若 系 统 稳 定 , K 需 要 满 足 如 下 方 程 组 : 根据劳斯稳定判据可得,若系统稳定,K需要满足如下方程组: 根据劳斯稳定判据可得,若系统稳定,K需要满足如下方程组:
{ 10 − K > 0 20 − 10 K − K 2 = − ( K − 1.708 ) ( K + 11.708 ) > 0 K > 0 \begin{cases} 10-K>0\\ 20-10K-K^2=-(K-1.708)(K+11.708)>0 \\ K>0 \end{cases} ⎩⎪⎨⎪⎧10−K>020−10K−K2=−(K−1.708)(K+11.708)>0K>0
解 上 述 方 程 组 可 得 : K < 10 , − 11.708 < K < 1.708 , K > 0 解上述方程组可得:K<10,-11.708<K<1.708,K>0 解上述方程组可得:K<10,−11.708<K<1.708,K>0
因 此 , 当 0 < K < 1.708 时 , 闭 环 系 统 是 稳 定 的 。 因此,当0<K<1.708时,闭环系统是稳定的。 因此,当0<K<1.708时,闭环系统是稳定的。
- 题目:已知单位反馈系统的开环传递函数:
G ( s ) = 10 ( 2 s + 1 ) s 2 ( s 2 + 6 s + 100 ) G(s)=\frac{10(2s+1)}{s^2(s^2+6s+100)} G(s)=s2(s2+6s+100)10(2s+1)
试求输入为 r ( t ) = 2 + 2 t + t 2 r(t)=2+2t+t^2 r(t)=2+2t+t2时,系统的稳态误差。
考点分析:系统稳态误差可以通过静态误差系数法或终值定理求解,但求解稳态误差前必须对系统稳定性进行判断。
解:
由 于 系 统 为 单 位 负 反 馈 , 根 据 开 环 传 递 函 数 可 以 求 得 闭 环 系 统 的 特 征 方 程 : 由于系统为单位负反馈,根据开环传递函数可以求得闭环系统的特征方程: 由于系统为单位负反馈,根据开环传递函数可以求得闭环系统的特征方程:
D ( s ) = s 2 ( s 2 + 6 s + 100 ) + 10 ( 2 s + 1 ) = s 4 + 6 s 3 + 100 s 2 + 20 s + 10 = 0 D(s)=s^2(s^2+6s+100)+10(2s+1)=s^4+6s^3+100s^2+20s+10=0 D(s)=s2(s2+6s+100)+10(2s+1)=s4+6s3+100s2+20s+10=0
由 赫 尔 维 茨 判 据 可 知 , n = 4 , 各 项 系 数 a 0 = 1 , a 1 = 6 , a 2 = 100 , a 3 = 20 , a 4 = 10 均 为 正 , 且 Δ 2 = a 1 a 2 − a 0 a 3 = 580 > 0 , 以 及 Δ 2 > a 1 2 a 4 / a 3 = 18 , 因 此 , 系 统 是 稳 定 的 。 由赫尔维茨判据可知,n=4,各项系数a_0=1,a_1=6,a_2=100,a_3=20,a_4=10均为正,且\Delta_2=a_1a_2-a_0a_3=580>0,以及\Delta_2>a_1^2a_4/a_3=18,因此,系统是稳定的。 由赫尔维茨判据可知,n=4,各项系数a0=1,a1=6,a2=100,a3=20,a4=10均为正,且Δ2=a1a2−a0a3=580>0,以及Δ2>a12a4/a3=18,因此,系统是稳定的。
用 终 值 定 理 来 求 解 系 统 的 稳 态 误 差 , 有 : 用终值定理来求解系统的稳态误差,有: 用终值定理来求解系统的稳态误差,有:
e s s ( ∞ ) = lim s → 0 s E ( s ) = lim s → 0 s ⋅ 1 1 + G ( s ) H ( s ) ⋅ R ( s ) = lim s → 0 s R ( s ) ⋅ s 2 ( s 2 + 6 s + 100 ) s 2 ( s 2 + 6 s + 100 ) + 10 ( 2 s + 1 ) e_{ss}(\infty)=\lim_{s→0}sE(s)=\lim_{s→0}s·\frac{1}{1+G(s)H(s)}·R(s)=\lim_{s→0}sR(s)·\frac{s^2(s^2+6s+100)}{s^2(s^2+6s+100)+10(2s+1)} ess(∞)=s→0limsE(s)=s→0lims⋅1+G(s)H(s)1⋅R(s)=s→0limsR(s)⋅s2(s2+6s+100)+10(2s+1)s2(s2+6s+100)
当 系 统 输 入 是 r ( t ) = 2 + 2 t + t 2 时 , R ( s ) = 2 s + 2 s 2 + 2 s 3 = 2 ( s 2 + s + 1 ) s 3 , 因 此 当系统输入是r(t)=2+2t+t^2时,R(s)=\frac{2}{s}+\frac{2}{s^2}+\frac{2}{s^3}=\frac{2(s^2+s+1)}{s^3},因此 当系统输入是r(t)=2+2t+t2时,R(s)=s2+s22+s32=s32(s2+s+1),因此
e s s ( ∞ ) = lim s → 0 s ⋅ 2 ( s 2 + s + 1 ) s 3 ⋅ s 2 ( s 2 + 6 s + 100 ) s 2 ( s 2 + 6 s + 100 ) + 10 ( 2 s + 1 ) = 20 e_{ss}(\infty)=\lim_{s→0}s·\frac{2(s^2+s+1)}{s^3}·\frac{s^2(s^2+6s+100)}{s^2(s^2+6s+100)+10(2s+1)}=20 ess(∞)=s→0lims⋅s32(s2+s+1)⋅s2(s2+6s+100)+10(2s+1)s2(s2+6s+100)=20
- 题目:已知单位反馈系统的开环传递函数如下:
G ( s ) = 10 ( 2 s + 1 ) ( 4 s + 1 ) s 2 ( s 2 + 2 s + 10 ) G(s)=\frac{10(2s+1)(4s+1)}{s^2(s^2+2s+10)} G(s)=s2(s2+2s+10)10(2s+1)(4s+1)
试求位置误差系数 K p K_p Kp、速度误差系数 K v K_v Kv、加速度误差系数 K a K_a Ka。
考点分析:根据静态误差系数的定义求三大误差系数。
解:
K p = lim s → 0 G ( s ) H ( s ) = lim s → 0 10 ( 2 s + 1 ) ( 4 s + 1 ) s 2 ( s 2 + 2 s + 10 ) = ∞ K_p=\lim_{s→0}G(s)H(s)=\lim_{s→0}\frac{10(2s+1)(4s+1)}{s^2(s^2+2s+10)}=\infty Kp=s→0limG(s)H(s)=s→0lims2(s2+2s+10)10(2s+1)(4s+1)=∞
K v = lim s → 0 s G ( s ) H ( s ) = lim s → 0 s ⋅ 10 ( 2 s + 1 ) ( 4 s + 1 ) s 2 ( s 2 + 2 s + 10 ) = ∞ K_v=\lim_{s→0}sG(s)H(s)=\lim_{s→0}s·\frac{10(2s+1)(4s+1)}{s^2(s^2+2s+10)}=\infty Kv=s→0limsG(s)H(s)=s→0lims⋅s2(s2+2s+10)10(2s+1)(4s+1)=∞
K a = lim s → 0 s 2 G ( s ) H ( s ) = lim s → 0 s 2 ⋅ 10 ( 2 s + 1 ) ( 4 s + 1 ) s 2 ( s 2 + 2 s + 10 ) = 1 K_a=\lim_{s→0}s^2G(s)H(s)=\lim_{s→0}s^2·\frac{10(2s+1)(4s+1)}{s^2(s^2+2s+10)}=1 Ka=s→0lims2G(s)H(s)=s→0lims2⋅s2(s2+2s+10)10(2s+1)(4s+1)=1
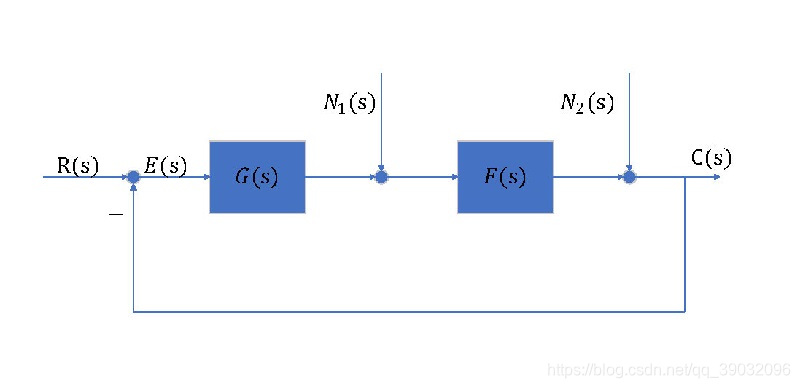
- 题目:设控制系统如下图,其中:
G ( s ) = K p + K s , F ( s ) = 1 J s G(s)=K_p+\frac{K}{s},F(s)=\frac{1}{Js} G(s)=Kp+sK,F(s)=Js1
输入 r ( t ) r(t) r(t)及扰动 n 1 ( t ) n_1(t) n1(t)和 n 2 ( t ) n_2(t) n2(t)均为单位阶跃函数,试求:
(1) 在 r ( t ) r(t) r(t)作用下系统的稳态误差;
(2) 在 n 1 ( t ) n_1(t) n1(t)作用下系统的稳态误差;
(3) 在 n 1 ( t ) n_1(t) n1(t)和 n 2 ( t ) n_2(t) n2(t)同时作用下系统的稳态误差。
考点分析:系统在输入及扰动作用下稳态误差的计算。
解:
( 1 ) r ( t ) 作 用 下 系 统 的 稳 态 误 差 , 误 差 传 递 函 数 为 : (1) r(t)作用 下系统的稳态误差,误差传递函数为: (1)r(t)作用下系统的稳态误差,误差传递函数为:
Φ e ( s ) = E ( s ) R ( s ) = 1 1 + G ( s ) F ( s ) \Phi_e(s)=\frac{E(s)}{R(s)}=\frac{1}{1+G(s)F(s)} Φe(s)=R(s)E(s)=1+G(s)F(s)1
则 则 则
E ( s ) = Φ e ( s ) R ( s ) = R ( s ) 1 + G ( s ) F ( s ) E(s)=\Phi_e(s)R(s)=\frac{R(s)}{1+G(s)F(s)} E(s)=Φe(s)R(s)=1+G(s)F(s)R(s)
根 据 终 值 定 理 , 系 统 的 稳 态 误 差 为 : 根据终值定理,系统的稳态误差为: 根据终值定理,系统的稳态误差为:
e s s ( ∞ ) = lim s → 0 s E ( s ) = lim s → 0 s ⋅ R ( s ) 1 + G ( s ) F ( s ) e_{ss}(\infty)=\lim_{s→0}sE(s)=\lim_{s→0}s·\frac{R(s)}{1+G(s)F(s)} ess(∞)=s→0limsE(s)=s→0lims⋅1+G(s)F(s)R(s)
由 于 由于 由于
R ( s ) = 1 s , G ( s ) = K p + K s , F ( s ) = 1 J s R(s)=\frac{1}{s},G(s)=K_p+\frac{K}{s},F(s)=\frac{1}{Js} R(s)=s1,G(s)=Kp+sK,F(s)=Js1
因 此 : 因此: 因此:
e s s ( ∞ ) = lim s → 0 s ⋅ 1 1 + ( K p + K s ) ⋅ 1 J s ⋅ 1 s = 0 e_{ss}(\infty)=\lim_{s→0}s·\frac{1}{1+(K_p+\frac{K}{s})·\frac{1}{Js}}·\frac{1}{s}=0 ess(∞)=s→0lims⋅1+(Kp+sK)⋅Js11⋅s1=0
即 在 r ( t ) = 1 ( t ) 作 用 下 系 统 的 稳 态 误 差 为 0 。 即在r(t)=1(t)作用下系统的稳态误差为0。 即在r(t)=1(t)作用下系统的稳态误差为0。
( 2 ) n 1 ( t ) 作 用 下 系 统 的 稳 态 误 差 , 在 N 1 ( s ) 作 用 下 系 统 的 输 出 为 : (2) n_1(t)作用 下系统的稳态误差,在N_1(s)作用下系统的输出为: (2)n1(t)作用下系统的稳态误差,在N1(s)作用下系统的输出为:
C 1 ( s ) = F ( s ) 1 + G ( s ) F ( s ) ⋅ N 1 ( s ) C_1(s)=\frac{F(s)}{1+G(s)F(s)}·N_1(s) C1(s)=1+G(s)F(s)F(s)⋅N1(s)
故 n 1 ( t ) 引 起 的 误 差 函 数 为 : 故n_1(t)引起的误差函数为: 故n1(t)引起的误差函数为:
E n 1 ( s ) = 0 − C 1 ( s ) = − F ( s ) 1 + G ( s ) F ( s ) ⋅ N 1 ( s ) E_{n1}(s)=0-C_1(s)=-\frac{F(s)}{1+G(s)F(s)}·N_1(s) En1(s)=0−C1(s)=−1+G(s)F(s)F(s)⋅N1(s)
此 时 系 统 的 稳 态 误 差 为 : 此时系统的稳态误差为: 此时系统的稳态误差为:
e s s n 1 ( ∞ ) = lim s → 0 s E n 1 ( s ) = lim s → 0 s ⋅ [ − F ( s ) 1 + G ( s ) F ( s ) ⋅ N 1 ( s ) ] e_{ssn1}(\infty)=\lim_{s→0}sE_{n1}(s)=\lim_{s→0}s·[-\frac{F(s)}{1+G(s)F(s)}·N_1(s)] essn1(∞)=s→0limsEn1(s)=s→0lims⋅[−1+G(s)F(s)F(s)⋅N1(s)]
由 于 由于 由于
N 1 ( s ) = 1 s , G ( s ) = K p + K s , F ( s ) = 1 J s N_1(s)=\frac{1}{s},G(s)=K_p+\frac{K}{s},F(s)=\frac{1}{Js} N1(s)=s1,G(s)=Kp+sK,F(s)=Js1
因 此 因此 因此
e s s n 1 ( ∞ ) = lim s → 0 [ − s J s 2 + K p s + K ] = 0 e_{ssn1}(\infty)=\lim_{s→0}[-\frac{s}{Js^2+K_ps+K}]=0 essn1(∞)=s→0lim[−Js2+Kps+Ks]=0
即 在 n 1 ( t ) = 1 ( t ) 作 用 下 系 统 的 稳 态 误 差 为 0 。 即在n_1(t)=1(t)作用下系统的稳态误差为0。 即在n1(t)=1(t)作用下系统的稳态误差为0。
( 3 ) n 1 ( t ) 和 n 2 ( t ) 同 时 作 用 下 系 统 的 稳 态 误 差 , 在 N 1 ( s ) 和 N 2 ( s ) 分 别 作 用 下 系 统 的 误 差 函 数 : (3) n_1(t)和n_2(t)同时作用 下系统的稳态误差,在N_1(s)和N_2(s)分别作用下系统的误差函数: (3)n1(t)和n2(t)同时作用下系统的稳态误差,在N1(s)和N2(s)分别作用下系统的误差函数:
E n 1 ( s ) = 0 − C 1 ( s ) = − F ( s ) 1 + G ( s ) F ( s ) ⋅ N 1 ( s ) E_{n1}(s)=0-C_1(s)=-\frac{F(s)}{1+G(s)F(s)}·N_1(s) En1(s)=0−C1(s)=−1+G(s)F(s)F(s)⋅N1(s)
E n 2 ( s ) = 0 − C 2 ( s ) = − 1 1 + G ( s ) F ( s ) ⋅ N 2 ( s ) E_{n2}(s)=0-C_2(s)=-\frac{1}{1+G(s)F(s)}·N_2(s) En2(s)=0−C2(s)=−1+G(s)F(s)1⋅N2(s)
因 此 , n 1 ( t ) 和 n 2 ( t ) 同 时 作 用 下 系 统 的 误 差 为 : 因此,n_1(t)和n_2(t)同时作用 下系统的误差为: 因此,n1(t)和n2(t)同时作用下系统的误差为:
E n ( s ) = E n 1 ( s ) + E n 2 ( s ) = − F ( s ) N 1 ( s ) + N 2 ( s ) 1 + G ( s ) F ( s ) E_n(s)=E_{n1}(s)+E_{n2}(s)=-\frac{F(s)N_1(s)+N_2(s)}{1+G(s)F(s)} En(s)=En1(s)+En2(s)=−1+G(s)F(s)F(s)N1(s)+N2(s)
此 时 系 统 的 稳 态 误 差 为 : 此时系统的稳态误差为: 此时系统的稳态误差为:
e s s n ( ∞ ) = lim s → 0 s E n ( s ) = lim s → 0 s [ − F ( s ) N 1 ( s ) + N 2 ( s ) 1 + G ( s ) F ( s ) ] = lim s → 0 [ − J s 2 + s J s 2 + K p s + K ] = 0 e_{ssn}(\infty)=\lim_{s→0}sE_n(s)=\lim_{s→0}s[-\frac{F(s)N_1(s)+N_2(s)}{1+G(s)F(s)}]=\lim_{s→0}[-\frac{Js^2+s}{Js^2+K_ps+K}]=0 essn(∞)=s→0limsEn(s)=s→0lims[−1+G(s)F(s)F(s)N1(s)+N2(s)]=s→0lim[−Js2+Kps+KJs2+s]=0
即 在 n 1 ( t ) = 1 ( t ) 和 n 2 ( t ) = 1 ( t ) 同 时 作 用 下 系 统 的 稳 态 误 差 为 0 。 即在n_1(t)=1(t)和n_2(t)=1(t)同时作用 下系统的稳态误差为0。 即在n1(t)=1(t)和n2(t)=1(t)同时作用下系统的稳态误差为0。
- 题目:设随动系统的微分方程为:
{ T 1 d 2 c ( t ) d t 2 + d c ( t ) d t = K 2 u ( t ) u ( t ) = K 1 [ r ( t ) − b ( t ) ] T 2 d b ( t ) d t + b ( t ) = c ( t ) \begin{cases} T_1\frac{d^2c(t)}{dt^2}+\frac{dc(t)}{dt}=K_2u(t)\\ \\ u(t)=K_1[r(t)-b(t)]\\ \\ T_2\frac{db(t)}{dt}+b(t)=c(t) \end{cases} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧T1dt2d2c(t)+dtdc(t)=K2u(t)u(t)=K1[r(t)−b(t)]T2dtdb(t)+b(t)=c(t)
其中, T 1 、 T 2 T_1、T_2 T1、T2和 K 2 K_2 K2为正常数。若要求 r ( t ) = 1 + t r(t)=1+t r(t)=1+t时, c ( t ) c(t) c(t)对 r ( t ) r(t) r(t)的稳态误差不大于正常数 ε 0 \varepsilon_0 ε0,试问 K 1 K_1 K1应满足什么条件?已知全部初始条件为零。
考点分析:研究系统参数选择和系统稳态误差的关系,注意,首先考虑参数选择和系统稳定性的关系。
解:
( 1 ) 系 统 的 结 构 图 。 对 题 设 给 定 系 统 的 微 分 方 程 进 行 拉 氏 变 换 , 有 : (1)系统的结构图。对题设给定系统的微分方程进行拉氏变换,有: (1)系统的结构图。对题设给定系统的微分方程进行拉氏变换,有:
{ ( T 1 s 2 + s ) C ( s ) = K 2 U ( s ) U ( s ) = K 1 ( s ) [ R ( s ) − B ( s ) ] ( T 2 s + 1 ) B ( s ) = C ( s ) \begin{cases} (T_1s^2+s)C(s)=K_2U(s)\\ \\ U(s)=K_1(s)[R(s)-B(s)]\\ \\ (T_2s+1)B(s)=C(s) \end{cases} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧(T1s2+s)C(s)=K2U(s)U(s)=K1(s)[R(s)−B(s)](T2s+1)B(s)=C(s)
由 上 述 方 程 式 画 出 系 统 的 结 构 图 , 如 下 图 : 由上述方程式画出系统的结构图,如下图: 由上述方程式画出系统的结构图,如下图:

( 2 ) 系 统 参 数 选 择 与 系 统 稳 定 性 的 关 系 , 由 结 构 图 得 闭 环 传 递 函 数 : (2)系统参数选择与系统稳定性的关系,由结构图得闭环传递函数: (2)系统参数选择与系统稳定性的关系,由结构图得闭环传递函数:
Φ ( s ) = K 1 K 2 ( T 2 s + 1 ) s ( T 1 s + 1 ) ( T 2 s + 1 ) + K 1 K 2 \Phi(s)=\frac{K_1K_2(T_2s+1)}{s(T_1s+1)(T_2s+1)+K_1K_2} Φ(s)=s(T1s+1)(T2s+1)+K1K2K1K2(T2s+1)
闭 环 特 征 方 程 为 : 闭环特征方程为: 闭环特征方程为:
D ( s ) = T 1 T 2 s 3 + ( T 1 + T 2 ) s 2 + s + K 1 K 2 = 0 D(s)=T_1T_2s^3+(T_1+T_2)s^2+s+K_1K_2=0 D(s)=T1T2s3+(T1+T2)s2+s+K1K2=0
列 劳 斯 表 如 下 : 列劳斯表如下: 列劳斯表如下:
| s 3 s^3 s3 | T 1 T 2 T_1T_2 T1T2 | 1 |
|---|---|---|
| s 2 s^2 s2 | T 1 + T 2 T_1+T_2 T1+T2 | K 1 K 2 K_1K_2 K1K2 |
| s 1 s^1 s1 | ( T 1 + T 2 ) − T 1 T 2 K 1 K 2 T 1 + T 2 \frac{(T_1+T_2)-T_1T_2K_1K_2}{T_1+T_2} T1+T2(T1+T2)−T1T2K1K2 | |
| s 0 s^0 s0 | K 1 K 2 K_1K_2 K1K2 |
在 T 1 、 T 2 和 K 2 为 正 常 数 条 件 下 , 使 闭 环 系 统 稳 定 的 充 要 条 件 为 : 在T_1、T_2和K_2为正常数条件下,使闭环系统稳定的充要条件为: 在T1、T2和K2为正常数条件下,使闭环系统稳定的充要条件为:
0 < K 1 < T 1 + T 2 K 2 T 1 T 2 0<K_1<\frac{T_1+T_2}{K_2T_1T_2} 0<K1<K2T1T2T1+T2
( 3 ) 系 统 参 数 选 择 与 系 统 稳 态 误 差 的 关 系 , 定 义 系 统 的 误 差 为 E ( s ) = R ( s ) − C ( s ) , 则 (3)系统参数选择与系统稳态误差的关系,定义系统的误差为E(s)=R(s)-C(s),则 (3)系统参数选择与系统稳态误差的关系,定义系统的误差为E(s)=R(s)−C(s),则
Φ e ( s ) = E ( s ) R ( s ) = 1 − Φ ( s ) = s [ T 1 T 2 s 2 + ( T 1 + T 2 ) s + ( 1 − K 1 K 2 T 2 ) ] T 1 T 2 s 3 + ( T 1 + T 2 ) s 2 + s + K 1 K 2 \Phi_e(s)=\frac{E(s)}{R(s)}=1-\Phi(s)=\frac{s[T_1T_2s^2+(T_1+T_2)s+(1-K_1K_2T_2)]}{T_1T_2s^3+(T_1+T_2)s^2+s+K_1K_2} Φe(s)=R(s)E(s)=1−Φ(s)=T1T2s3+(T1+T2)s2+s+K1K2s[T1T2s2+(T1+T2)s+(1−K1K2T2)]
由 于 由于 由于
r ( t ) = 1 + t r(t)=1+t r(t)=1+t
因 此 因此 因此
R ( s ) = 1 s + 1 s 2 = s + 1 s 2 R(s)=\frac{1}{s}+\frac{1}{s^2}=\frac{s+1}{s^2} R(s)=s1+s21=s2s+1
由 终 值 定 理 得 由终值定理得 由终值定理得
e s s ( ∞ ) = lim s → 0 s E ( s ) = lim s → 0 s ⋅ s [ T 1 T 2 s 2 + ( T 1 + T 2 ) s + ( 1 − K 1 K 2 T 2 ) ] T 1 T 2 s 3 + ( T 1 + T 2 ) s 2 + s + K 1 K 2 ⋅ s + 1 s 2 = 1 − K 1 K 2 T 2 K 1 K 2 e_{ss}(\infty)=\lim_{s→0}sE(s)=\lim_{s→0}s·\frac{s[T_1T_2s^2+(T_1+T_2)s+(1-K_1K_2T_2)]}{T_1T_2s^3+(T_1+T_2)s^2+s+K_1K_2}·\frac{s+1}{s^2}=\frac{1-K_1K_2T_2}{K_1K_2} ess(∞)=s→0limsE(s)=s→0lims⋅T1T2s3+(T1+T2)s2+s+K1K2s[T1T2s2+(T1+T2)s+(1−K1K2T2)]⋅s2s+1=K1K21−K1K2T2
令 e s s ( ∞ ) = 1 − K 1 K 2 T 2 K 1 K 2 ≤ ε 0 令e_{ss}(\infty)=\frac{1-K_1K_2T_2}{K_1K_2}≤\varepsilon_0 令ess(∞)=K1K21−K1K2T2≤ε0
可 得 : 可得: 可得:
K 1 ≥ 1 K 2 ( T 2 + ε 0 ) K_1≥\frac{1}{K_2(T_2+\varepsilon_0)} K1≥K2(T2+ε0)1
考 虑 到 使 系 统 稳 定 的 充 要 条 件 为 : 考虑到使系统稳定的充要条件为: 考虑到使系统稳定的充要条件为:
0 < K 1 < T 1 + T 2 K 2 T 1 T 2 0<K_1<\frac{T_1+T_2}{K_2T_1T_2} 0<K1<K2T1T2T1+T2
因 此 满 足 题 意 要 求 的 K 1 值 为 : 因此满足题意要求的K_1值为: 因此满足题意要求的K1值为:
1 K 2 ( T 2 + ε 0 ) ≤ K 1 < T 1 + T 2 K 2 T 1 T 2 \frac{1}{K_2(T_2+\varepsilon_0)}≤K_1<\frac{T_1+T_2}{K_2T_1T_2} K2(T2+ε0)1≤K1<K2T1T2T1+T2