各位鱼粉大家好,我是爱折腾的小鱼。动手学ROS2开课了,晚上买了个大鸡腿奖励了一下自己,说起来小鱼最近又胖了不少,俨然成了条胖鱼!
昨晚小鱼搭建了一个私人的网盘,使用docker来部署mysql和云盘真的是非常非常的方便,再次感受到了docker的牛逼,记得很久之前还学过k8s,现在差不多都给忘了哈哈!
正题
说一说今天的正题docker和ros2 ,本篇文章小鱼主要解决三个问题:
- ubuntu上如何安装docker
- docker如何安装ros2
- 如何可视化docker中的小乌龟
一、ubuntu上安装docker
这个就很简单啦,一句话搞定
sudo apt install docker.io
二、Docker中安装ROS2-Foxy
安装其实谈不上,这里我们直接拉取ROS2的官方镜像
sudo docker pull osrf/ros:foxy-desktop
拉取完成使用下面的命令就可以进入已经安装好的镜像
sudo docker run -it osrf/ros:foxy-desktop
接着在终端里输入ros2
到这里就完成了docker中运行ros2镜像,是不是速度贼快,而且完全和你的电脑隔离,一行指令就可以生成多个镜像,连rosdep都是init和update好的。
三、ROS2 docker可视化运行小乌龟
这里小鱼又要吹爆一个软件了,mobaxterm,有兴趣的小伙伴可以尝试一下网址放这里
https://mobaxterm.mobatek.net/
安装好启动mobaxterm
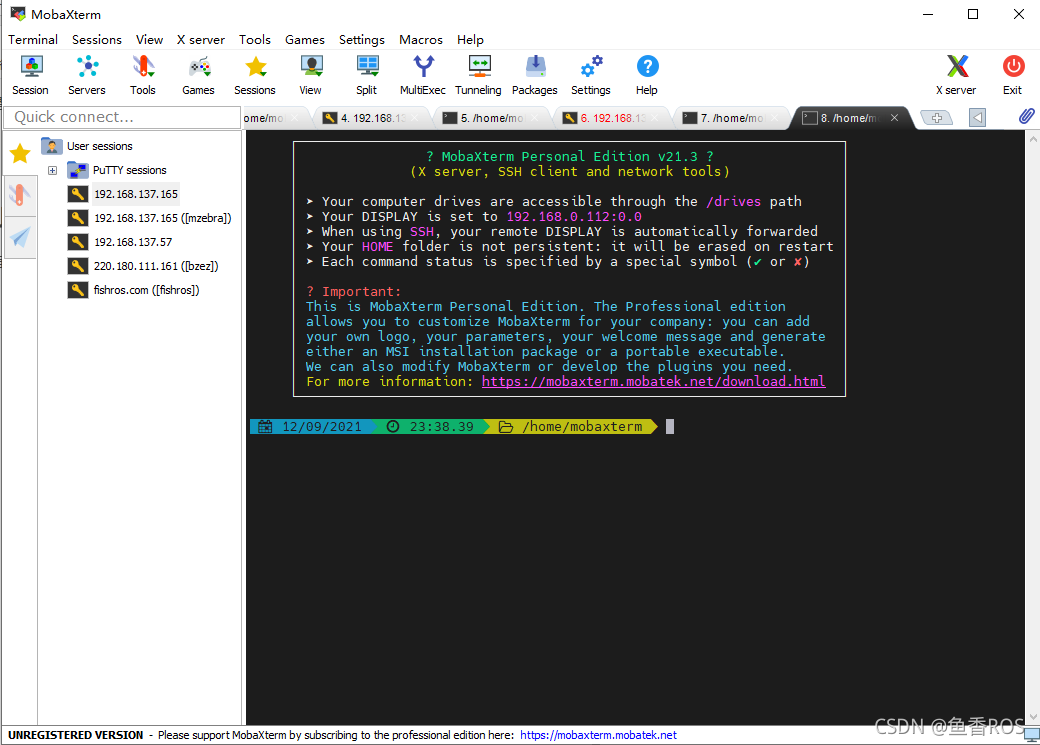
确保你和你的安装docker的电脑在一个局域网里

注意这里的display,接着我们设置docker中ros2镜像的DISPLAY的环境变量的值
export DISPLAY=192.168.0.112:0.0
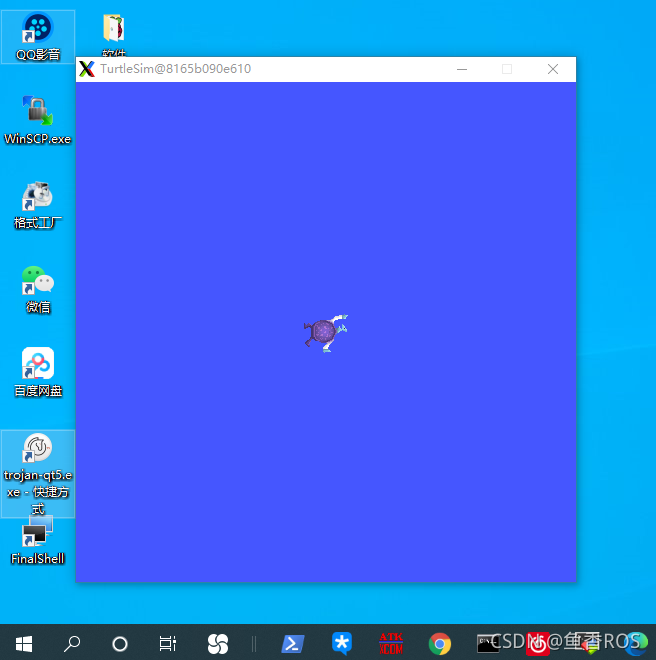
接着就可以启动小乌龟模拟器看看
扫描二维码关注公众号,回复:
14273470 查看本文章

ros2 run turtlesim turtlesim_node
接着你会发现神奇的一幕,在你的windows电脑上跳出来了小乌龟的界面
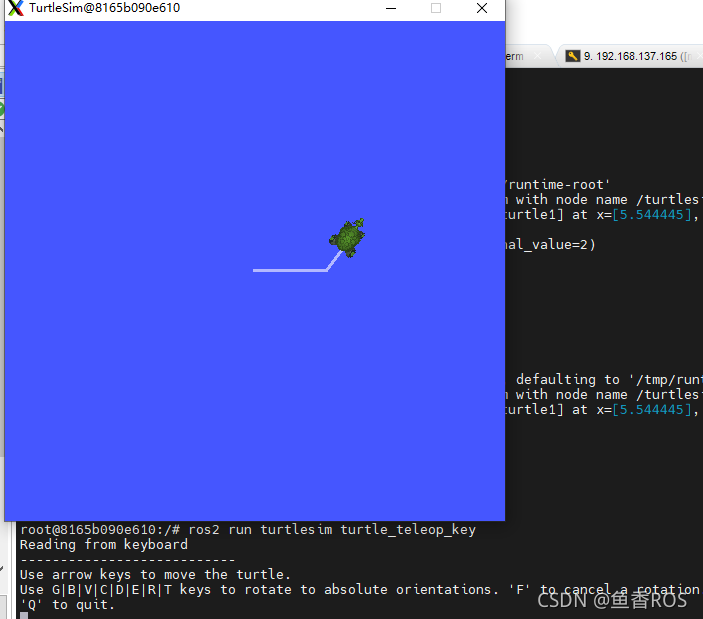
接着运行键盘控制节点
ros2 run turtlesim turtle_teleop_key
按下按键,小乌龟就跑起来了
最后
我是小鱼,愉快的周末又要结束了。欢迎大家关注小鱼的微信公众号《鱼香ROS》,加入鱼群,一起学习机器人!