经常遇到View矩阵的构造,现在记下来彻底弄明白吧
参考: https://gameinstitute.qq.com/community/detail/117006
左右手坐标系:https://www.3dgep.com/3d-math-primer-for-game-programmers/
目的
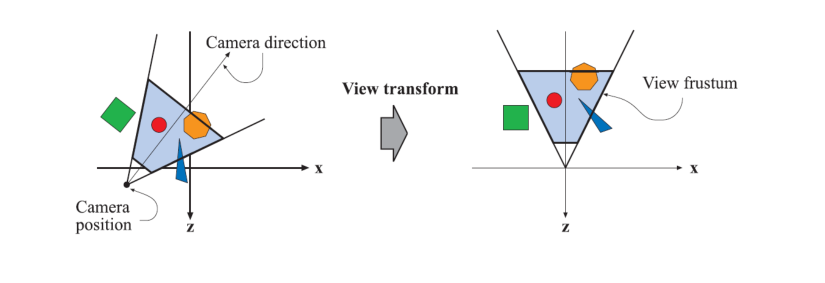
模型和视图变换阶段分为模型变换和视图变换。模型变换的目的是将模型变换到适合渲染的空间当中,而视图变换的目的是将摄像机放置于坐标原点,方便后续步骤的操作。 (浅墨 Real-Time Renderding提纲)
所谓空间坐标
其实就是以什么为笛卡尔坐标系,为参考系
相机的话是以相机朝向为-Z,上方为Y,右方为X
- Pworld是世界空间中P点的位置
- Pview是相机空间中P点的位置
- Plocal是模型空间中P点的位置
local到world
众所周知,世界空间才是我们所熟知的空间,所以图形学其实是希望所有空间都转到world空间来理解,我的理解是这样的,P代表位置,TRS代表 transform rotation scale
P w o r l d = T R S ∗ P l o c a l P_{world} = TRS*P_{local} Pworld=TRS∗Plocal
world到view
同理可得,任何一个坐标空间都可以转到world里,那么
(我们反过来推,Pview现在是未知的,如果假设Pview是已知的话)
P w o r l d = T R S ∗ P v i e w P_{world}= TRS * P_{view} Pworld=TRS∗Pview
两边同时左乘TRS的逆
P v i e w = ( T R S ) − 1 ∗ P w o r l d P_{view}= (TRS )^{-1} * P_{world} Pview=(TRS)−1∗Pworld
下面暂时不考虑T和S
其实就是求旋转矩阵R的逆
而这个旋转矩阵在Unity里恰好就是相机点的transform的三个方向(right, up forawrd) 合成的
注意:别的物体的方向,和相机的方向不是一回事,别混淆
补充理解
- 相当于把摄像机旋转到和世界坐标原点对齐
- 转到相机空间的话,其实就是把参考系变换到当前坐标系的三个轴上
( 1 0 0 0 1 0 0 0 1 ) \begin{pmatrix} 1 & 0 & 0\\\\ 0 & 1 & 0\\\\ 0 & 0 & 1\\\\ \end{pmatrix} ⎝⎜⎜⎜⎜⎜⎜⎛100010001⎠⎟⎟⎟⎟⎟⎟⎞
Unity中每一个物体都有一个transform矩阵 M
我们可以把这个M通过V变换到一个单位阵中,即
I = V M I = VM I=VM
显然
V = M − 1 V = M^{-1} V=M−1
所以相机的矩阵的三行的耆那三个分量就对应着,摄像机的三个方向。其中Unity摄像机是在右手坐标系,为了X和Y对齐,所以Z轴是反过来的