ROS从入门到放弃——用TurtleBot3做Navigation
本教程参考TurtleBot3
- 这里我们的机器人有3种选项
burger,waffle,waffle_pi。 - Gazebo的地形有两种选项
roslaunch turtlebot3_gazebo turtlebot3_world.launchroslaunch turtlebot3_gazebo turtlebot3_house.launch
6.2 SLAM Simulation
- Terminal 1:打开Gazebo仿真环境
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_gazebo turtlebot3_world.launch

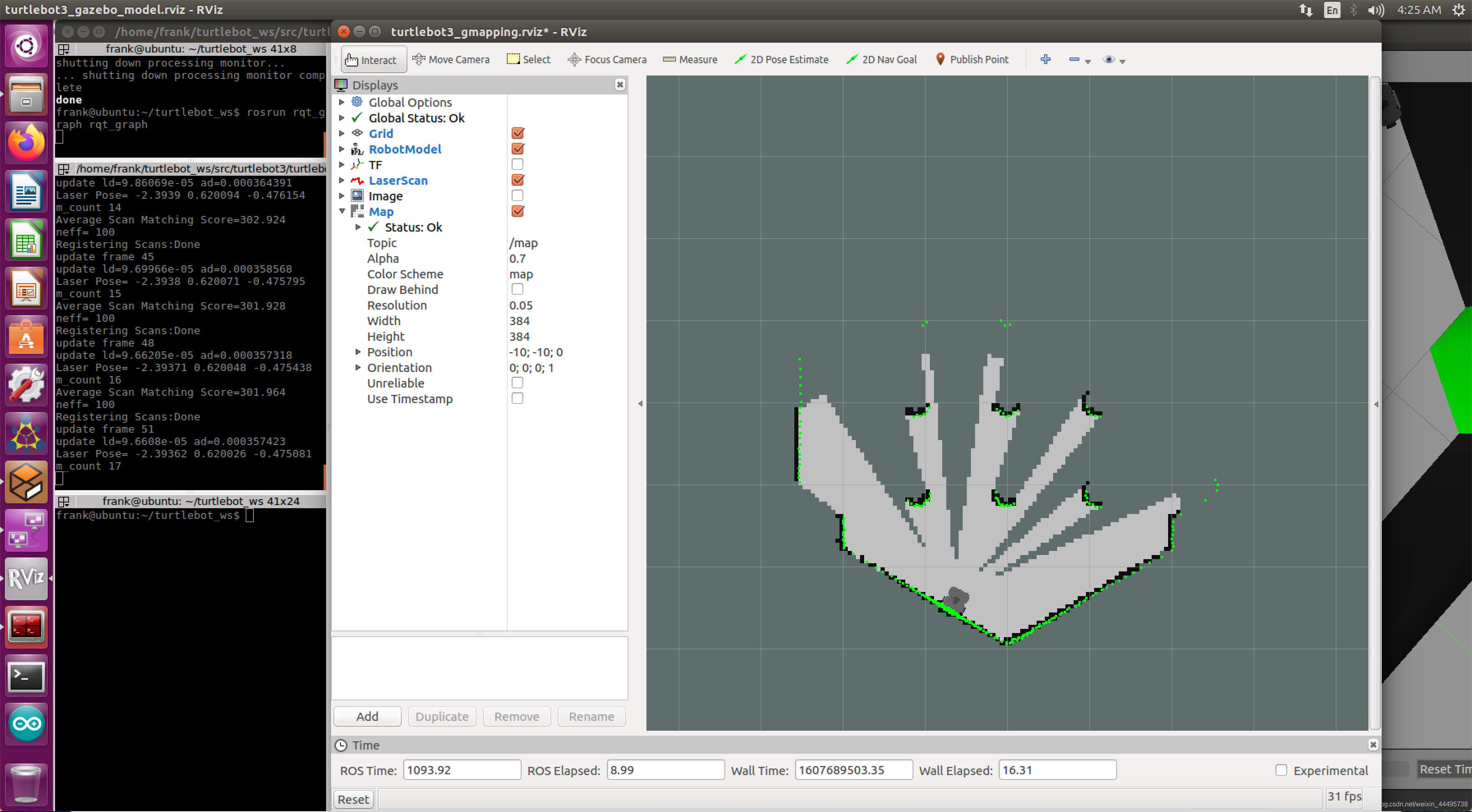
- Terminal 2:运行SLAM Node
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
- Terminal 3:运行Teleoperation Node
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
然后对着这个Terminal就可以wasdx来控制前后左右移动了,然后rviz里面的地图也会完整起来
- Terminal 3:关闭上面那个 运行自主导航
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch
当建好图之后,我们就可以把地图截图保存在桌面上,-f表示我们的希望输入保存的路径,保存完有两个文件map.pgm和map.yaml,yaml里面调用了map.pgm。
rosrun map_server map_saver -f ~/Desktop/map
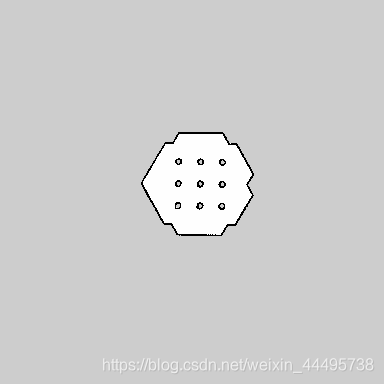
白色是可以去的地方,黑色是墙壁,灰色是我们不了解的地方。Occupancy Grid Map (OGM)
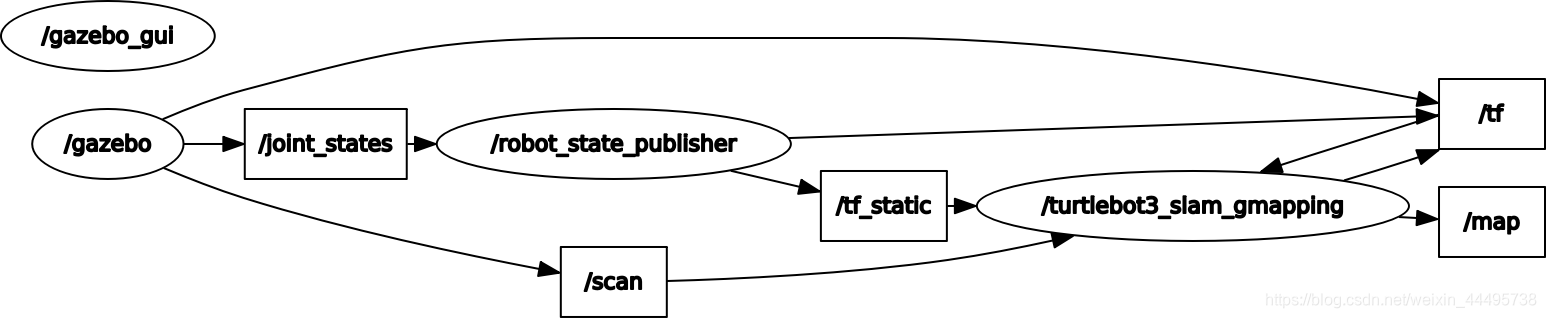
- 地图利用了机器人的里程表(Odometry),tf和扫描信息。
- 本节里面还介绍了如何使用多个机器人同时建图。
SLAM 参数介绍
我们可以定时或者定距离来采样。
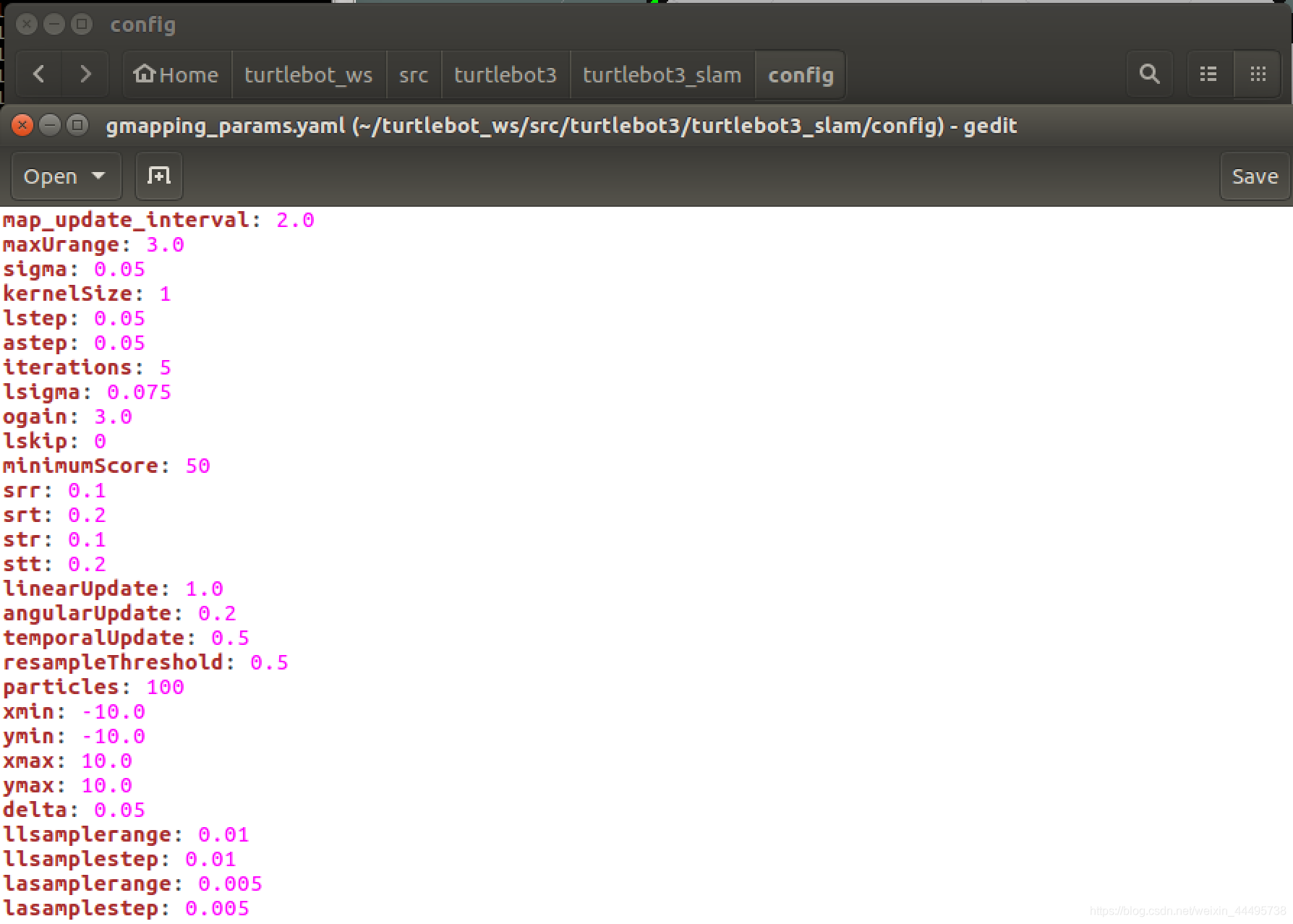
我们可以调节我们的SLAM的参数(在gmapping_params.yaml的文件中)
- maxUrange:此参数设置激光雷达传感器的最大可用范围。
- map_update_interval:更新地图的时间,数字越小速度越快
- minimumScore:此参数设置最小分数值,该分数确定传感器的扫描数据匹配测试的成功或失败。 这样可以减少大面积机器人的预期位置中的误差。 如果参数设置正确,您将看到类似于以下所示的信息:
设置太高,可能会显示WarningAverage Scan Matching Score=278.965 neff= 100 Registering Scans:Done update frame 6 update ld=2.95935e-05 ad=0.000302522 Laser Pose= -0.0320253 -5.36882e-06 -3.14142Scan Matching Failed, using odometry. Likelihood=0 lp:-0.0306155 5.75314e-06 -3.14151 op:-0.0306156 5.90277e-06 -3.14151 - linearUpdate:当机器人平移距离大于此值时,它将运行扫描过程。
- angularUpdate:当机器人旋转的速度超过此值时,它将运行扫描过程。 建议将此值设置为小于linearUpdate。
6.3 Navigation Simulation
接着上面的步骤,我们可以用来将我们之前保存的地图yaml数据读取出来。($HOME是根目录)
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
或者
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=~/Desktop/map.yaml
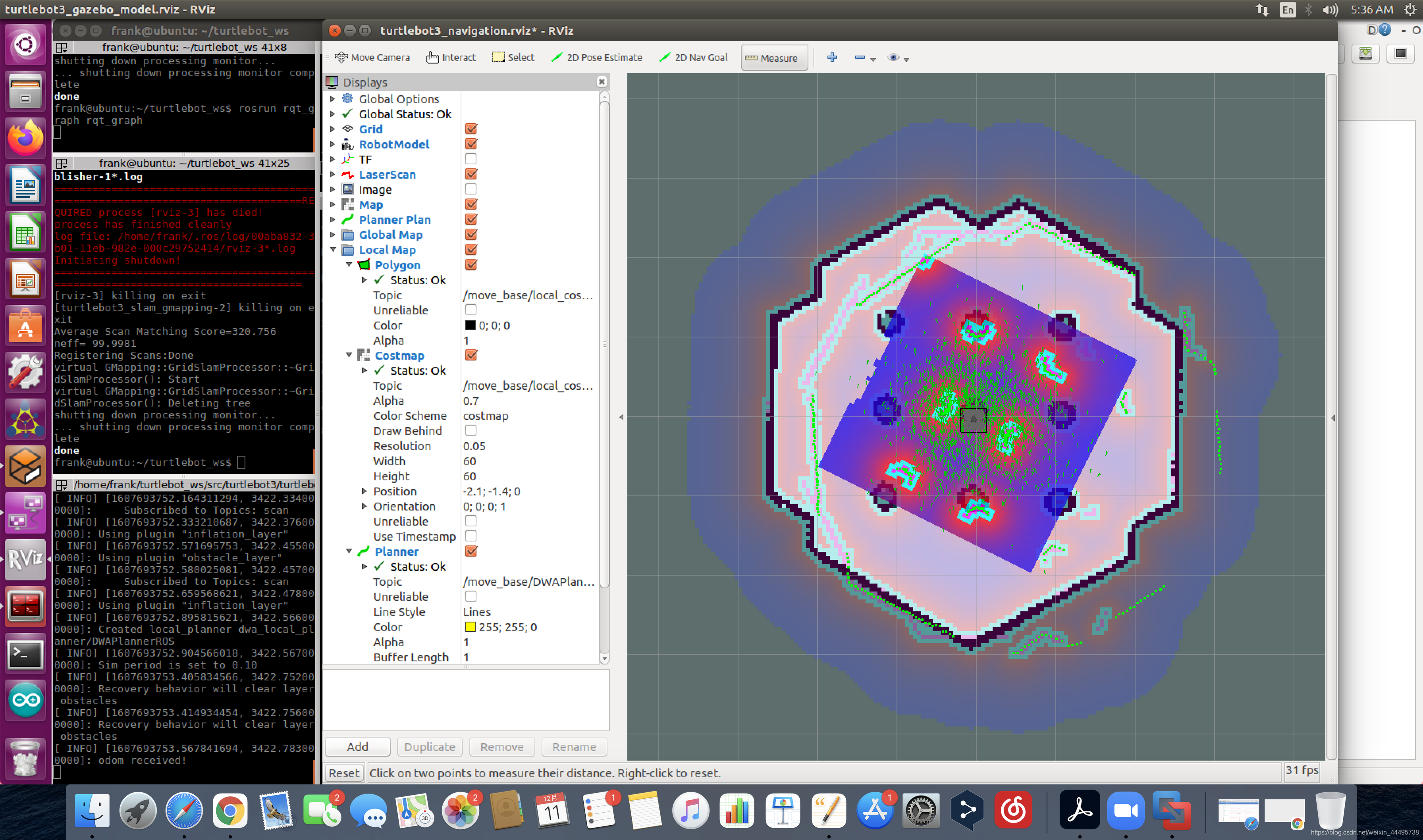
- 接着我们点击
2D Pose Estimate,然后点击机器人当前的位置,并将绿色箭头指向机器人的前方。 - 重复操作1直到两个地图重合。
- 然后它会用粒子(绿色的箭头)滤波把绿色的(SLAM)
- 接着可以用
2D Nav Goal指一个位置就可以把机器人移过去。
观察LaserScan的数据
我们可以用rostopic list查看我们当前的所有话题,其中有两个比较重要的话题,一个是/scan还有一个是cmd_vel。
/cmd_vel
rostopic info cmd_vel: geometry_msgs/Twist
rosmsg show geometry_msgs/Twist:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
rostopic echo /cmd_vel -n1: 显示出一个数据观察一下
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
/scan
rostopic info /scan:
Type: sensor_msgs/LaserScan
rosmsg show sensor_msgs/LaserScan:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
rostopic echo /scan -n1:
header:
seq: 25854
stamp:
secs: 5823
nsecs: 115000000
frame_id: "base_scan"
angle_min: 0.0
angle_max: 6.28318977356
angle_increment: 0.0175019223243
time_increment: 0.0
scan_time: 0.0
range_min: 0.119999997318
range_max: 3.5
ranges: [...]
intensities: [...]
---
在这个例子中我们可以看见我们雷达的范围是0到2 π \pi π,ranges给出了每一个角度上的距离,一共有 2 π / 0.0175019223243 = 360 2\pi/0.0175019223243=360 2π/0.0175019223243=360个元素。
自己写一个漫游地图的node
- 在ws的src中创建一个新的pkg
- 新的pkg中创建一个文件夹scripts: mynavigation.py
chmod +x mynavigation.py
#! /usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twist
def callback(msg):
vel_msg = Twist() #创建一个新的消息
vel_msg.linear.x = 0
vel_msg.linear.y = 0
vel_msg.linear.z = 0
vel_msg.angular.x = 0
vel_msg.angular.y = 0
vel_msg.angular.z = 0
if(msg.ranges[0]<0.5): #如果机器人正前方的点很近,我们就转弯
#print('Turn')
vel_msg.angular.z=1.82
pub.publish(vel_msg)
else:
#print('Go!')0.26
vel_msg.linear.x=0.26
pub.publish(vel_msg)
if __name__ == '__main__':
rospy.init_node('navigation')
rate = rospy.Rate(1)
pub = rospy.Publisher('cmd_vel', Twist,queue_size=10) #控制机器人
sub = rospy.Subscriber('/scan', LaserScan, callback)
rospy.spin()
或者,设置某一个范围内如果有障碍就掉头跑
#! /usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twist
def toclose(data,tmin,tmax,threshold=0.5):
# t [-180,180]
for i in data[0:tmax]:
if i<threshold:
return True
for i in data[360+tmin:]:
if i<threshold:
return True
return False
def callback(msg):
vel_msg = Twist()
vel_msg.linear.x = 0
vel_msg.linear.y = 0
vel_msg.linear.z = 0
vel_msg.angular.x = 0
vel_msg.angular.y = 0
vel_msg.angular.z = 0
#if(msg.ranges[0]<0.5):
if(toclose(msg.ranges,-30,30)):
print('Turn')
vel_msg.angular.z=1.82
pub.publish(vel_msg)
else:
print('Go!')
vel_msg.linear.x=0.26
pub.publish(vel_msg)
if __name__ == '__main__':
rospy.init_node('navigation')
#rate = rospy.Rate(1)
pub = rospy.Publisher('cmd_vel', Twist,queue_size=10)
sub = rospy.Subscriber('/scan', LaserScan, callback)
rospy.spin()