以下方法均是本人实际安装过程
一 、Burger汉堡型 Ubuntu MATE 系统安装步骤
• 在 windows 电脑中下载 Win32DiskImager 软件并安装
1. 格式 Miscro SD 卡为 FAT32 格式(可⽤ SDFormatter ⼯具格式化)
2. 启动Win32DiskImager
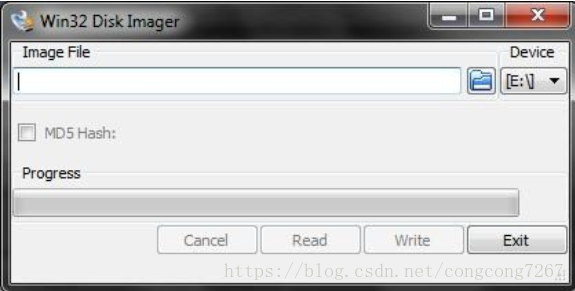
3. Image File处选择Raspbian映像⽂件
4. Device处选择盘符为你读卡器的盘符
5. 点Write,然后点⼀下Yes确定操作,开始系统写⼊
6. 写⼊完成,提示成功
7. 将Micro SD卡插⼊树莓派,注意芯⽚⾯朝向电路板
8. 为Raspberry Pi 3(树莓派3)插上键盘、⿏标、显示屏及电源,接通电源启动,如⼀切正常,在显
示屏上会显示Ubuntu MATE启动界⾯。
二 、为Raspberry Pi 3安装TurboBot3依赖的ROS包 (用官网ros wiki 提供的方法安装)
1.设置ROS源:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/
sources.list.d/ros-latest.list’
2.添加KEY(用官网 ros wiki 的key,本人亲测有效,后面的安装不会报错,其他方法基本都会报错):
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1163. 更新软件:
$ sudo apt-get update
$ sudo apt-get upgrade
4. 安装桌⾯版:
sudo apt-get install ros-kinetic-desktop-full
5. 初始化 rosdep :
sudo rosdep init
rosdep update
6. 启⽤环境:
source /opt/ros/kinetic/setup.bash
7. 增加到 .bashrc :
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
8 构建工厂依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
本人亲测,用官网方法安装没有报错。
此时可以运行 $roscore 检查ros是否安装成功
三、安装turtlebot依赖。
打开终端(Ctrl+Alt+T),复制输⼊如下指令:
ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-imagetransport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation
在安装turtlebot3之前,新建一个catkin_ws的工作空间,方法如下:
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/ $ catkin_make
$ source devel/setup.bash详细讲解见官网教程 ros wiki
安装turtlebot3。输⼊如下指令:
cd ~/catkin_ws/srcgit clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/catkin_ws && catkin_make
• 如果catkin_make完成没有任何错误,使⽤Raspberry Pi 3(树莓派3)的准备将完成。
USB设置:以下允许将USB端⼝⽤于没有root权限的OpenCR板
cd ~/catkin_ws/src/turtlebot3
sudo cp ./99-turtlebot3-cdc.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules
sudo udevadm trigger
• ⾄此Raspberry Pi 3(树莓派3)的安装完成。
以下为本人安装好后的效果图片