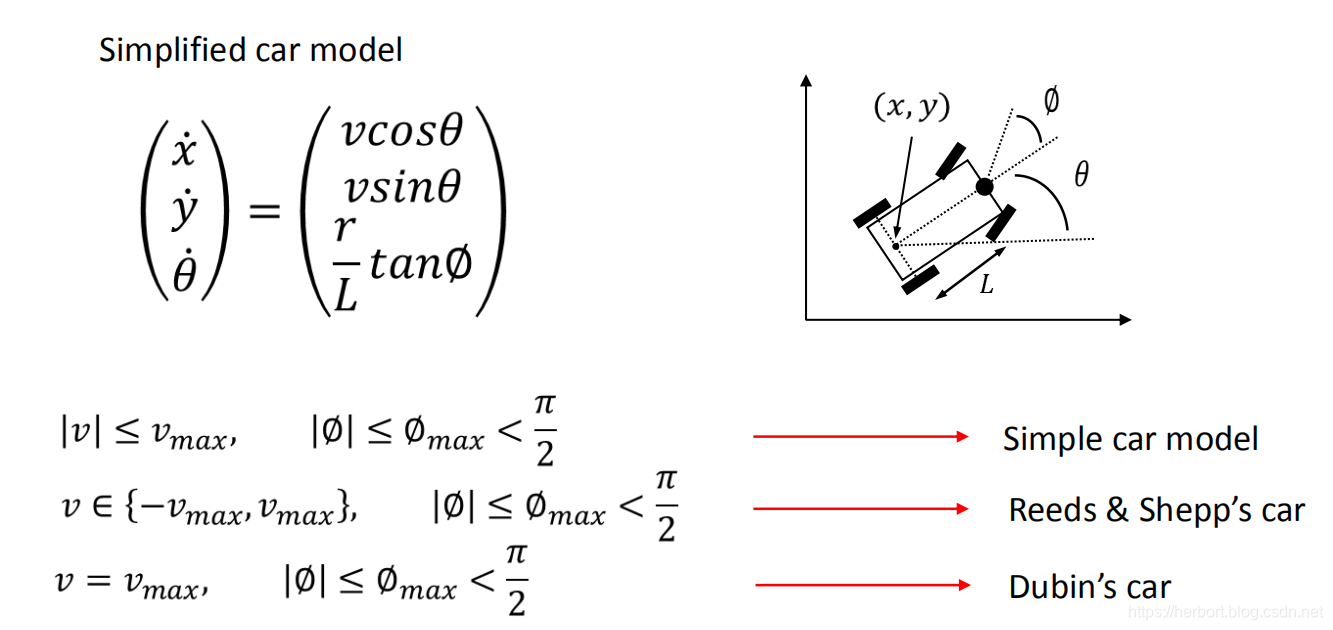
这里的Simple car model是在无人驾驶中常用到的车辆运动学模型,油门代表对速度v的控制,方向盘转角代表对Φ 的控制(Φ其实决定的是图1中的角速度ω),这两个量在实际中都是有一定的限制的。
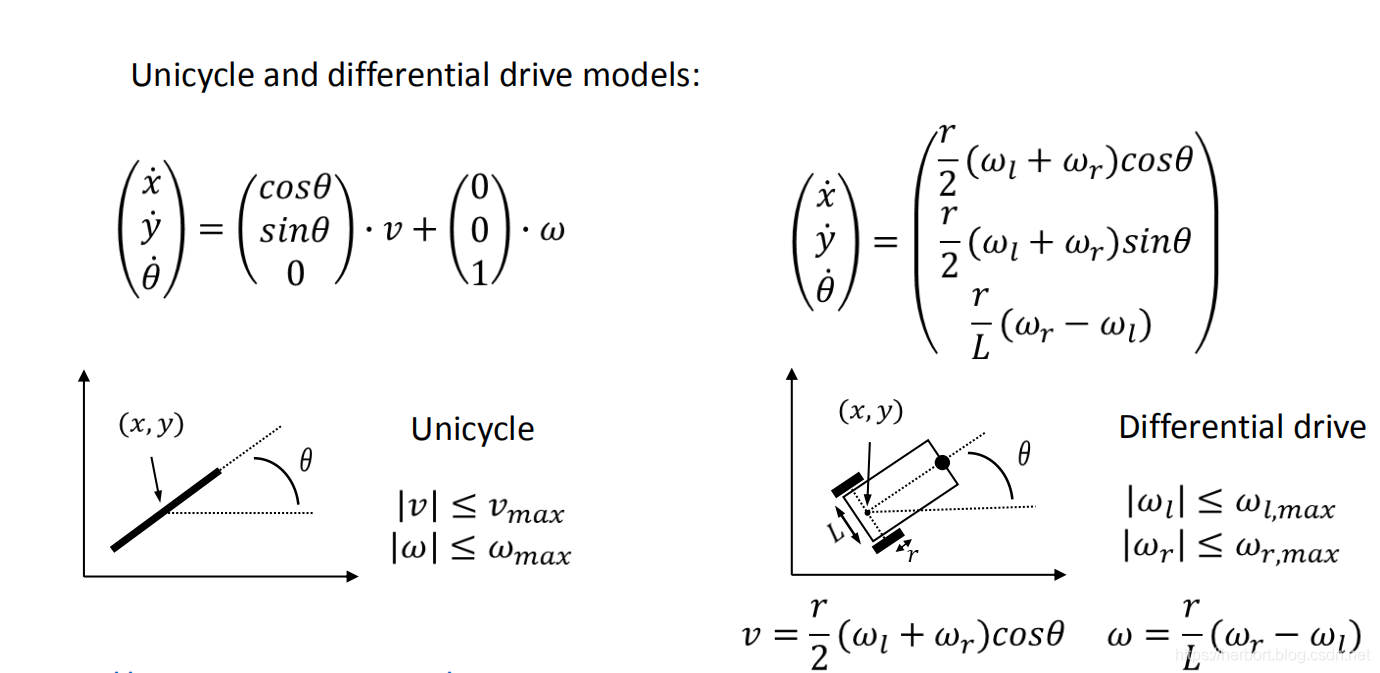
机器人学中常用的运动学模型

猜你喜欢
转载自blog.csdn.net/weixin_43795921/article/details/102750477
今日推荐
周排行