ubuntu18.04安装ROS
一、选择版本
根据博客最新(2019年)ROS各个发行版本适用的Linux操作系统平台以及语言工具要求
选择Melodic Morenia (May 2018 - May 2023)版本ROS。
二、安装
推荐博文:
在Ubuntu 18.04 LTS安装ROS Melodic版机器人操作系统(2019年10月更新MoveIt! 1.0 ROS 2.0 Dashing)
Ubuntu18.04下安装ROS
1、配置软件库
允许 “restricted,” “universe,” and “multiverse.”

2、更改软件包源为国内
可查看我的博文更新软件源为阿里源
3、将电脑设置为接受来自packages.ros.org的软件
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
4、设置密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
5、安装
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
遇到问题
无法修复缺失的软件包。 E: 无法下载 http://cn.archive.ubuntu.com/ubuntu/pool/universe/o/opencv/libopencv3.2-java_3.2.0+dfsg-4ubuntu0.1_all.deb 无法连接上 117.128.6.21:80 (117.128.6.21),连接超时。。。
解决:

如图所示位置添加
deb http://archive.ubuntu.com/ubuntu/ trusty main universe restricted multiverse
在终端中
sudo apt-get update
然后再回到安装的那一步,重装。
然后安装python-rosdep
sudo apt install python-rosdep
6、初始化
sudo rosdep init
rosdep update
遇到问题
error loading sources list:the read operation timed out
解决
用手机开热点,而且需要是移动的热点,我这里联通信号差…
7、添加环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8、安装插件
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
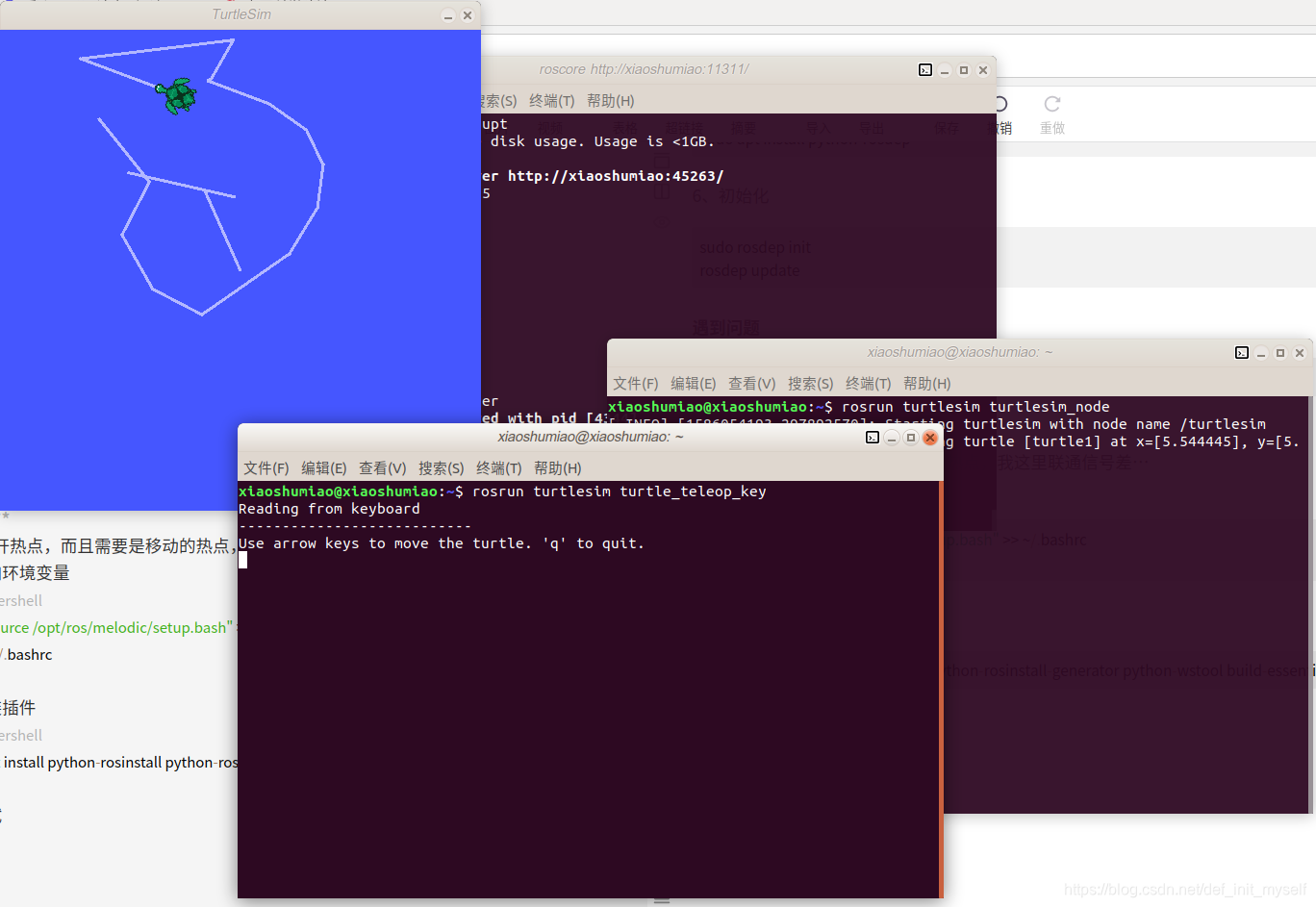
9、测试
一共开三个终端,分别输入:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
get!