1、设置源,选择清华源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2、设置Key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、更新软件
sudo apt-get update
4、下载ROS- melodic
sudo apt install ros-melodic-desktop-full -y
5、下载Vim编辑器
sudo apt-get install vim -y
6、编辑bashrc文件,配置环境变量
sudo vim ~/.bashrc
在最后一行加入
source /opt/ros/melodic/setup.bash
刷新环境变量
source ~/.bashrc
7、安装依赖项
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential -y
8、初始化
sudo rosdep init
一般来说这里会报错,解决办法
打开百度,搜索IP域名解析,找到站长工具,将报错信息网址域名IP解析出来
网址:
IP/服务器raw.githubusercontent.com的信息 - 站长工具
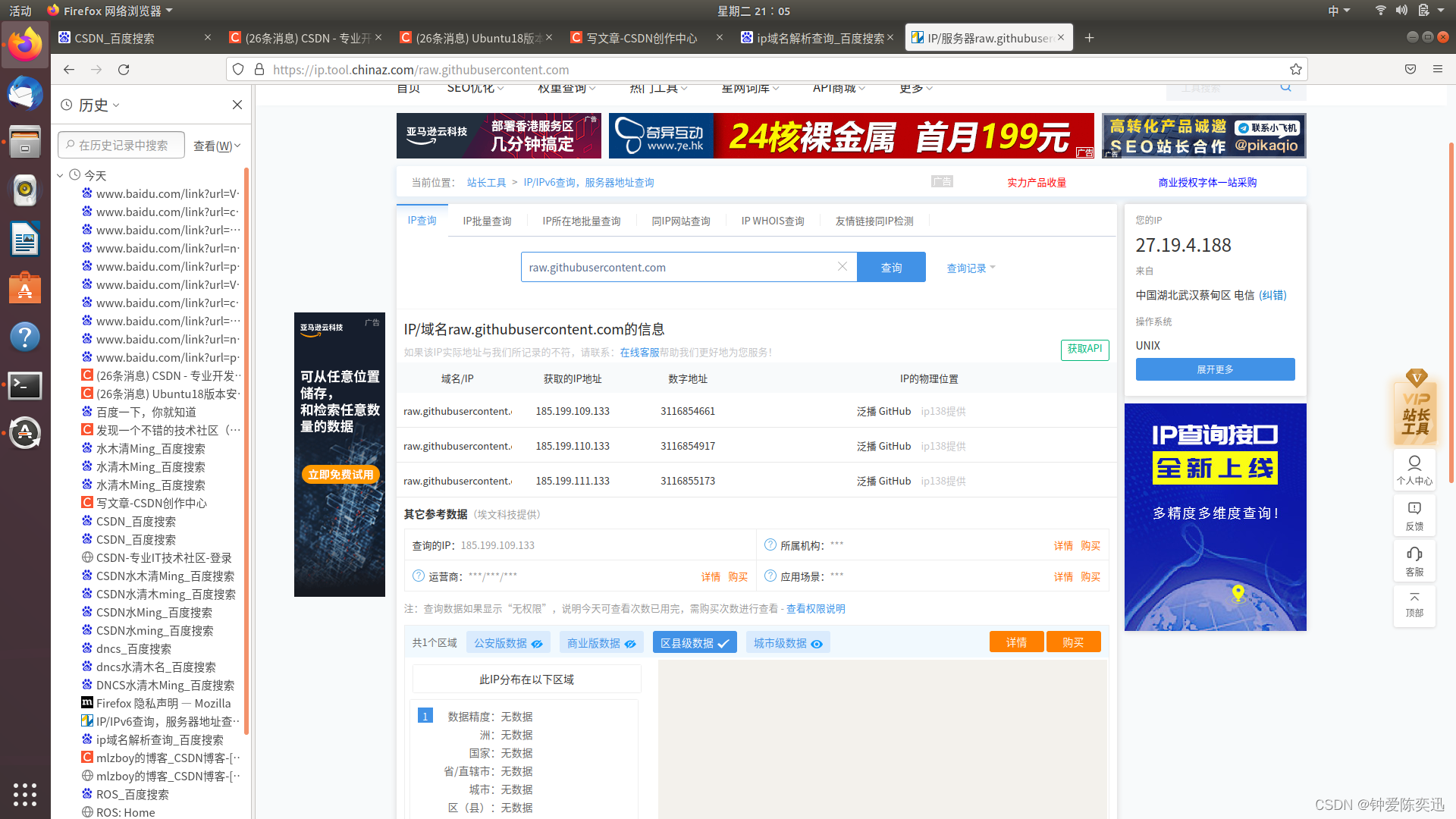
编辑/etc/hosts文件,配置域名解析
sudo vim /etc/hosts
仿照文件中的格式将IP和域名对应写入最后一行
再次执行初始化命令
sudo rosdep init
9、更新ROS包
rosdep update
这一步因为网络原因可能会报错,多试几次,实在不行可以不做,不会有很大影响。