Installation
Configure your Ubuntu repositories
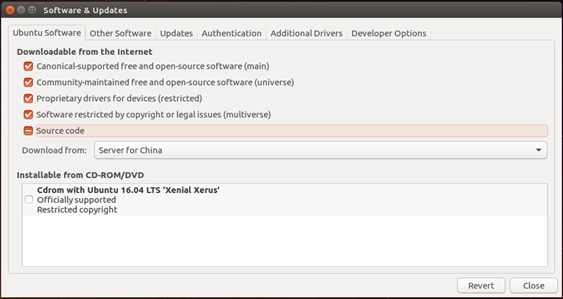
Configure your Ubuntu repositories to allow "restricted," "universe," and "multiverse." You can do like this
Setup your sources.list
Setup your computer to accept software from packages.ros.org.
- sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
Source Debs are also available |
Set up your keys
- sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
If you experience issues connecting to the keyserver, you can try substituting hkp://pgp.mit.edu:80 or hkp://keyserver.ubuntu.com:80 in the previous command.
Installation
First, make sure your Debian package index is up-to-date:
- sudo apt-get update
There are many different libraries and tools in ROS. We provided four default configurations to get you started. You can also install ROS packages individually.
In case of problems with the next step, you can use following repositories instead of the ones mentioned above ros-shadow-fixed
-
Desktop-Full Install: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception
- sudo apt-get install ros-melodic-desktop-full
or click here
Desktop Install: ROS, rqt, rviz, and robot-generic libraries - sudo apt-get install ros-melodic-desktop
or click here
ROS-Base: (Bare Bones) ROS package, build, and communication libraries. No GUI tools. - sudo apt-get install ros-melodic-ros-base
or click here
Individual Package: You can also install a specific ROS package (replace underscores with dashes of the package name): - sudo apt-get install ros-melodic-PACKAGE
e.g.
sudo apt-get install ros-melodic-slam-gmapping
- sudo apt-get install ros-melodic-desktop-full
To find available packages, use:
apt-cache search ros-melodic
Initialize rosdep
Before you can use ROS, you will need to initialize rosdep. rosdep enables you to easily install system dependencies for source you want to compile and is required to run some core components in ROS.
sudo rosdep init
rosdep update
Environment setup
It's convenient if the ROS environment variables are automatically added to your bash session every time a new shell is launched:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
If you have more than one ROS distribution installed, ~/.bashrc must only source the setup.bash for the version you are currently using.
If you just want to change the environment of your current shell, instead of the above you can type:
source /opt/ros/melodic/setup.bash
If you use zsh instead of bash you need to run the following commands to set up your shell:
echo "source /opt/ros/melodic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
Dependencies for building packages
Up to now you have installed what you need to run the core ROS packages. To create and manage your own ROS workspaces, there are various tools and requirements that are distributed separately. For example, rosinstall is a frequently used command-line tool that enables you to easily download many source trees for ROS packages with one command.
To install this tool and other dependencies for building ROS packages, run:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
Build farm status
The packages that you installed were built by the ROS build farm. You can check the status of individual packages here.
>