荷载在设计基准期T内最大值QT的概率分布
FT(x)={1-p*[1-Fi(x)]}^n
其中:将设计基准期T等分为n个相等的时段τ;
每个时段τ内,荷载Q出现的概率为p;
Fi(x)为荷载任意时点概率分布
当p*[1-Fi(x)]充分小,由于e^(-x)≈1-x
FT(x)≈{e^[-p*(1-Fi(x))]}^n={e^[-(1-Fi(x))]}^N≈{1-[1-Fi(x)]}^N=[Fi(x)]^N
上式里N=p*n,为荷载在设计基准期T内出现的平均次数
当p*[1-Fi(x)]充分小,那究竟多小是充分小?
1)T=50年,Fi(x)=0.1~0.9,p=0.1,0.3,0.5,0.7,0.9,0.95,0.98,1
clc;clear;
p=[0.1 0.3 0.5 0.7 0.9 0.95 0.98 1];
for i=1:8
n=50;
Fx=[0.1:0.02:0.9];
single a;
single b;
a=(1-p(i)*(ones(1,41)-Fx)).^n;
b=Fx.^(n*p(i));
z=a-b;
y=(a-b)./a
figure;
set(gcf, 'position', [200 200 600 600]);
subplot(2,1,1);
plot(Fx,y);
xlabel('Fi(x)');
ylabel('绝对误差d');
subplot(2,1,2);
plot(Fx,z);
xlabel('Fi(x)');
ylabel('相对误差r');
end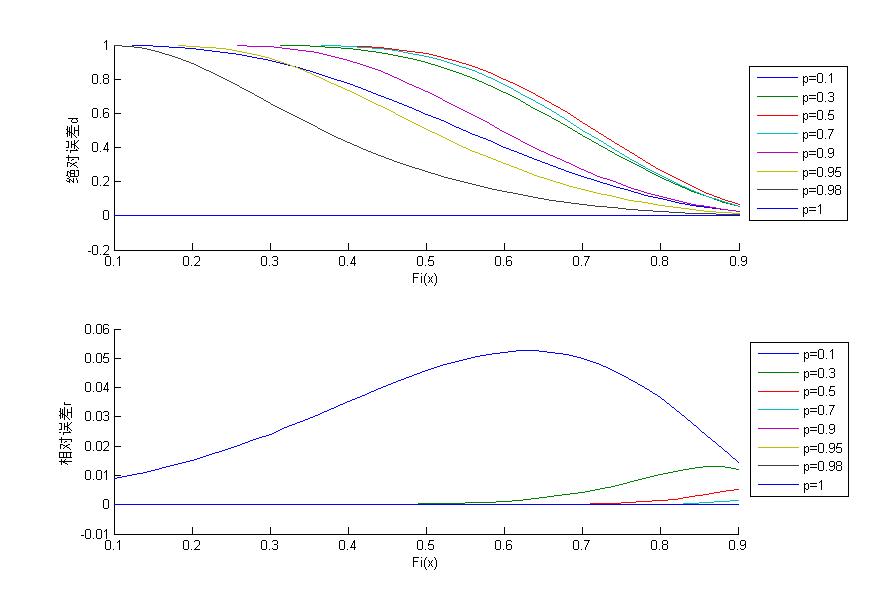
先看绝对误差,可以看出
每条曲线均有的共同趋势是:随着Fi(x)的增大,绝对误差逐渐减小;
p=1,误差为0,反映了p->1,绝对误差d->0;
p=0.5~0.9,各条绝对误差曲线呈钝角Z形,而p=0.1和p=0.3两条曲线存在一些不同;
p=0.5~0.9,p越大,绝对误差越小,而p=0.1~0.3,p越小,绝对误差越小;
再看相对误差,总体而言相对误差较小,仅p=0.1和0.3两条曲线误差较大,其余曲线相对误差均在1%以内,验证了平稳二项随机过程模型的正确性。
p=0.1和0.3两条曲线相对误差先增后减,最大相对误差达到5%左右;
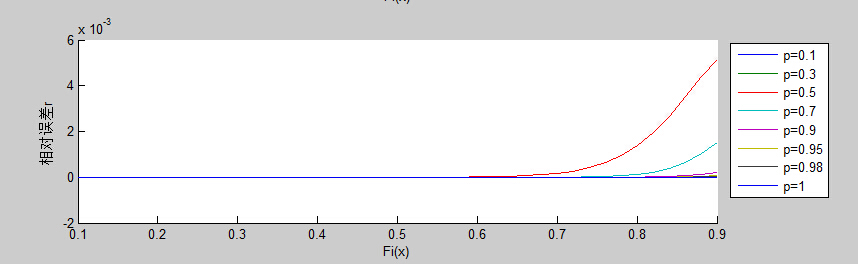
Fi(x)较小时,相对误差更小,见下图去掉p=0.1和0.3的相对误差线;
挖个坑,暂时没时间分析原因。