文章目录
系统
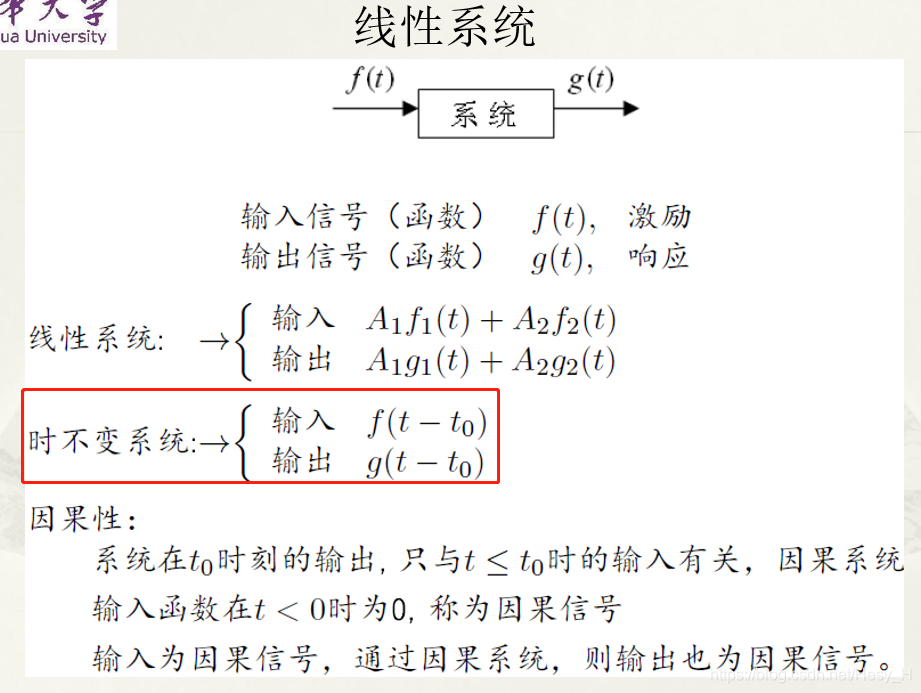
这个系统描述的就时某个时刻 t 的输出值g(t) 的计算方式:
取一个平均值 --》距离 t 时刻
时间有一个信号,该信号是冲击信号的f (
)倍的时候系统的反应( h(t,
)f(
)),对
进行积分,就是这个均值
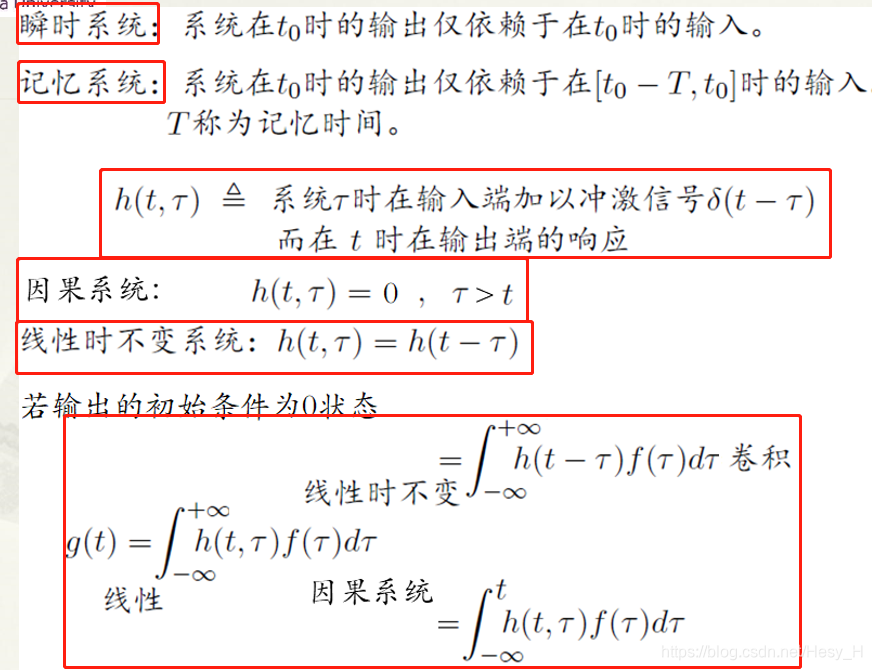
线性时不变系统
 、
、
特点:可以转换成输入和冲激响应函数的卷积
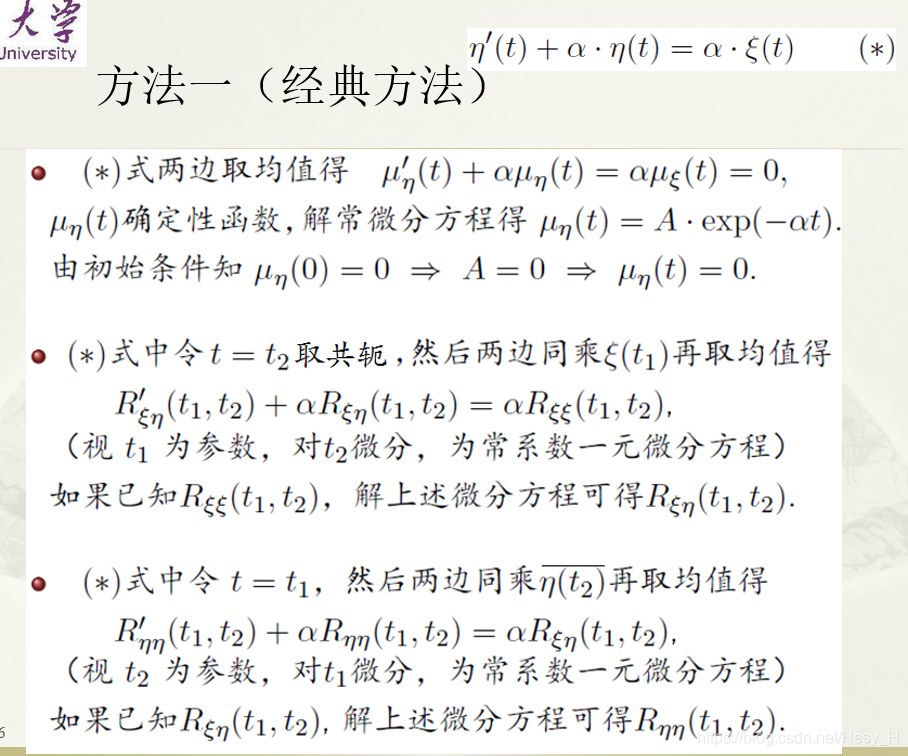
引例 线性时不变系统 已知输入信号的情况 揣测输出信号的情况
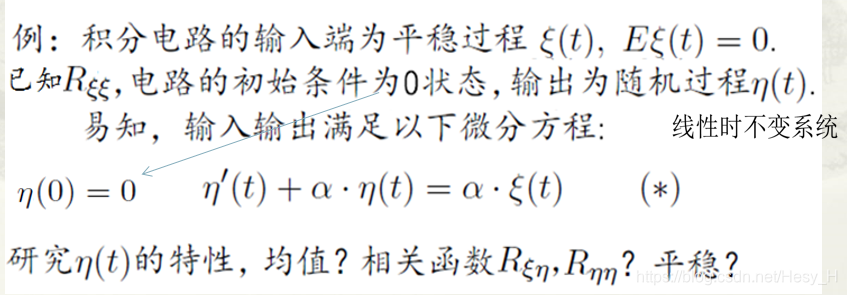
方法1 三个微分方程分别求解三个
方法2 时域
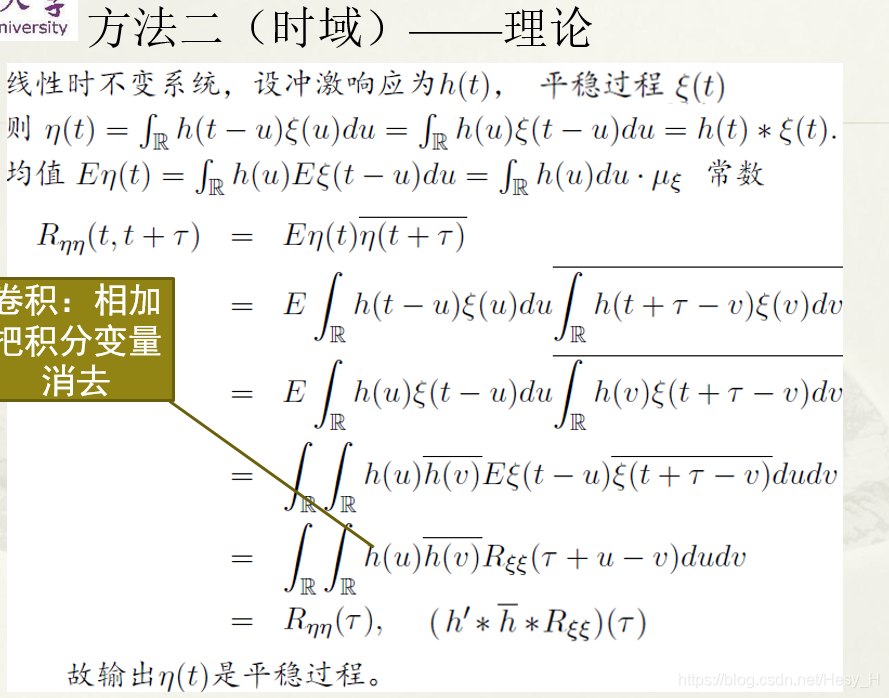
- 利用线性时不变系统的特性,在时域上进行计算
- 倒数第三步 E能够放进去是因为: 从第一行可以看出来这里的平均是针对t的,其他(\tau)是常量,u和v则是引入的积分变量,属于中间量,是会被积掉的
- 倒数第二步也是,利用u和v是中间量的特性(反正也是会被积掉的)所以最后的式子里面只有\tau没有别的变量
- 这里将h(u)看作是另一个函数 f(u) =h(-u) ,不过这里记作h’
- 为什么要记作-u,让三个函数的参数相加起来是一个值 —》 \tau
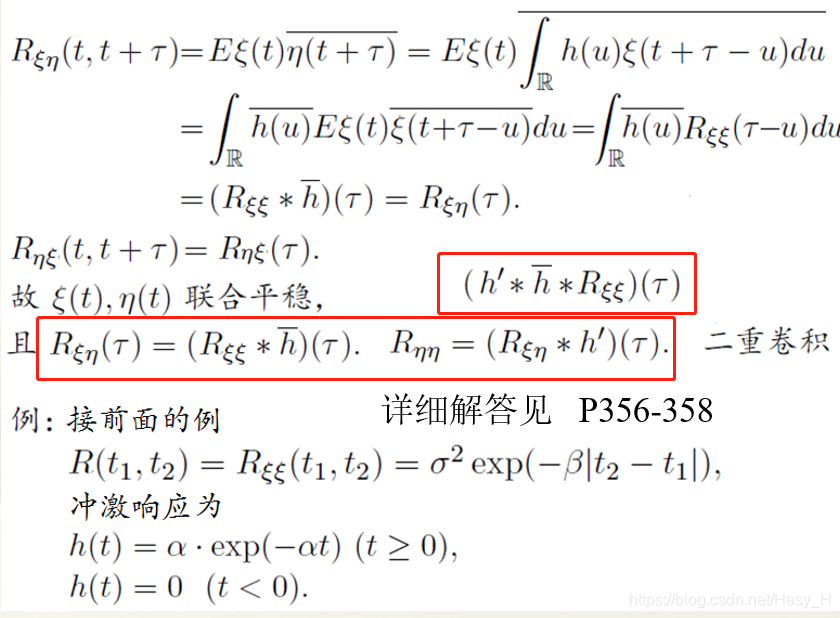
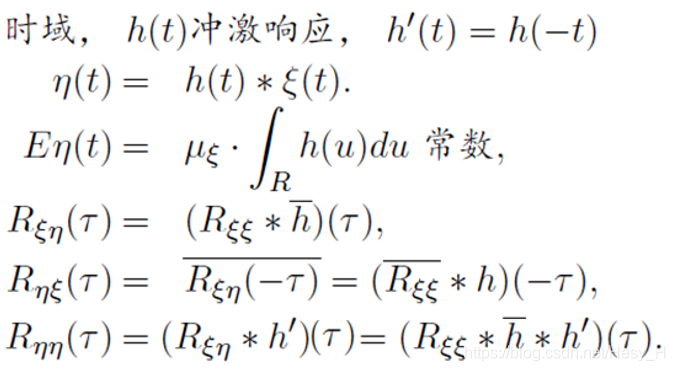
结论
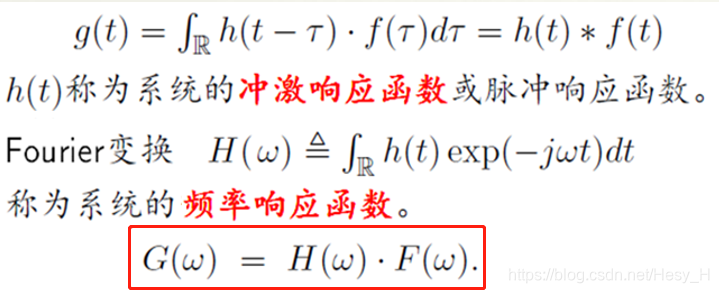
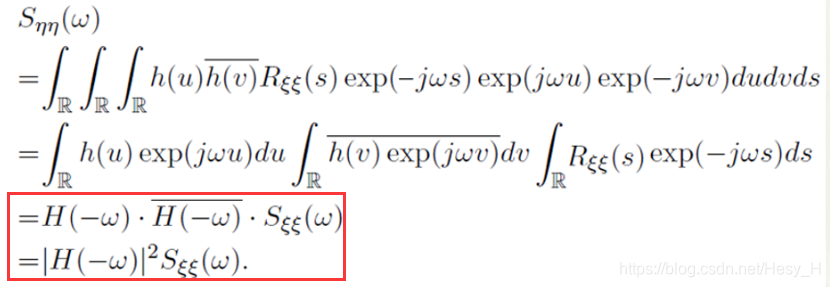
方法3 频域
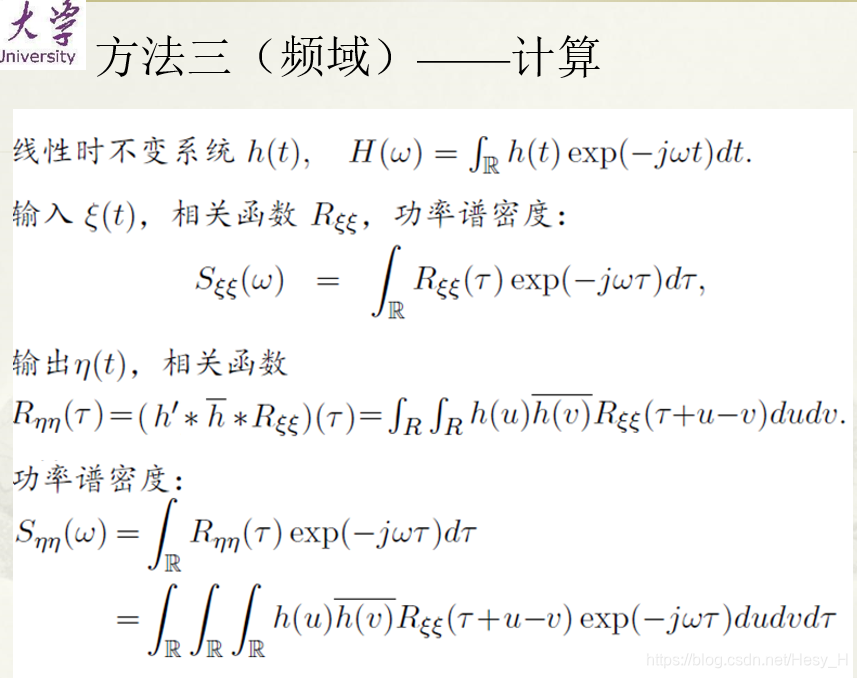
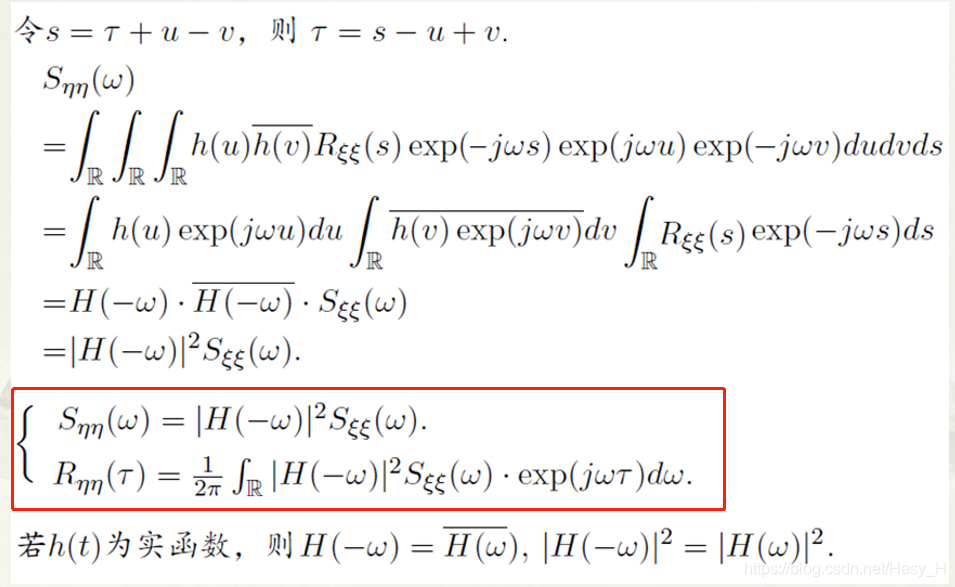
- 根据方法2推出的关系,得到输出的功率谱( Sη) 是输入的功率谱(Sξ)的关系等式 以及 输出的自相关(Rξ)如何用输入的功率谱( Sη )表达
- 主要思路就是
- 找到功率谱(S)和自相关函数(R)之间的转换关系
- 找到输出的功率谱(Sη )和输入的功率谱( Sξ)之间的关系
- 根据1、2 可以 ①从输入的自相关函数(Rξ)得到输出的功率谱密度函数(Sη ) ② 傅里叶逆变换Sη 得到Rη
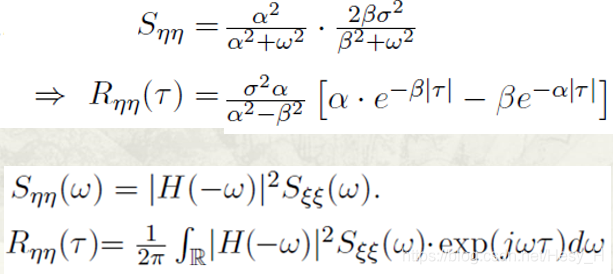
一些常见结论
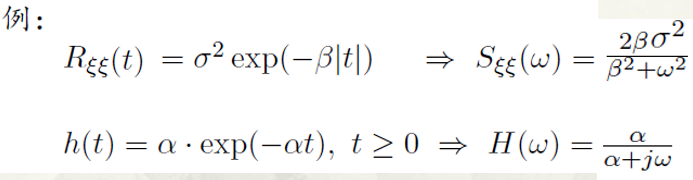
其中第一个是上次推导出来的结论,但是我们可以利用上面的结论求得:
拉普拉斯Laplace变换
引入目的
线性时不变系统中,我们利用H(w)得到相关的输出的性质,那么下载就是求系统的H(w)相关性质
概念
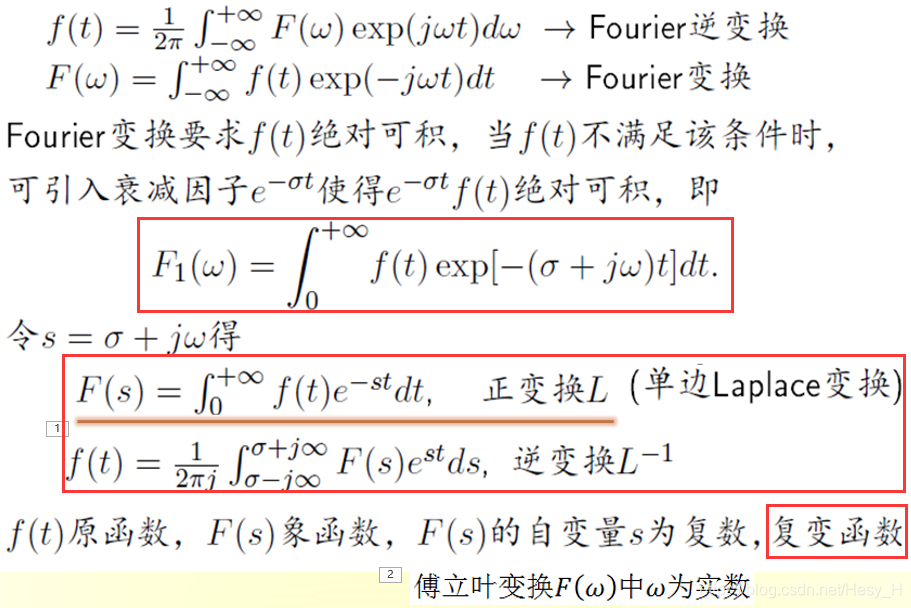
注意,s是复数,所以这是复变函数
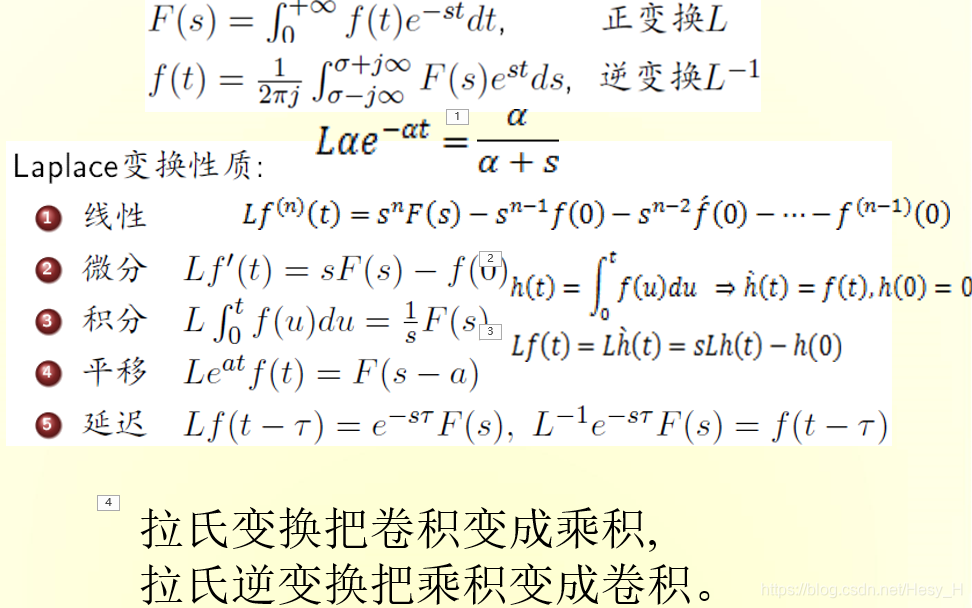
性质
-
Lf(t)就是f(t)函数的拉普拉斯变换
Leatf(t)就是eatf(t)函数的拉普拉斯变换 也就是 eatf(t)*e-st的单边积分 -
这里常用的一个性质就是:让各阶导数在0处取0 (零阶导就是该函数本身),这样就可以利用线性性质,将函数的导数进行拉普拉斯变换成原像
-
那个单独列出来的公式的记忆方式 ↓ :
上文的常见结论中有傅里叶变换
这里就是 ,所以卷积里面的算子是e-jwt的时候,分母就是加上jw;卷积里面的算子是e-st的时候,分母就是加上s

方法论
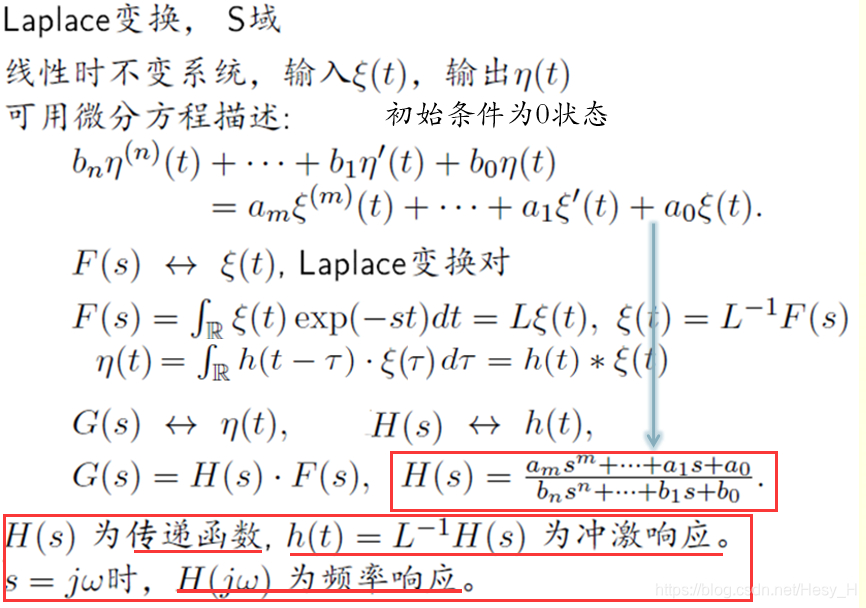
注意,以s为变量的像是传递函数,以jw为变量的像才是频率响应(区别就是后者相当于前者衰减因子为1的情况),以t为变量原像的则是冲激响应(这是我个人对下面这个方框的勉强理解)
例子
前提:
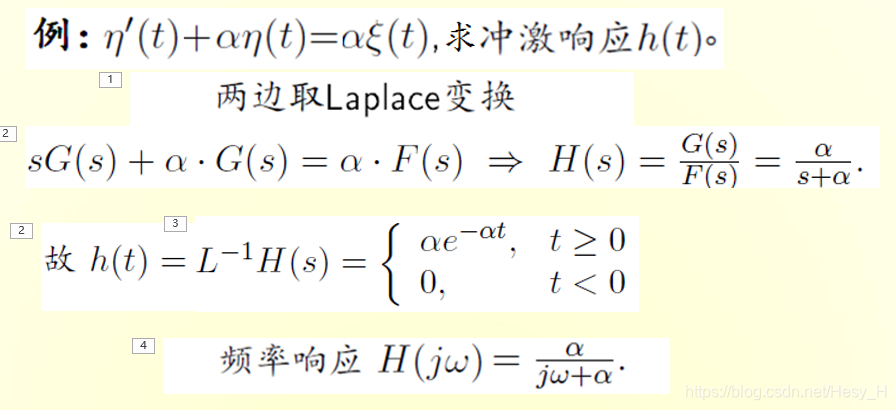
对于之前的这个问题,看到了求导,我们可以联想到用拉普拉斯变换的线性性质进行把导数消除掉
Z变换
引入目的
之前描述的线性时不变系统都是连续的输入以及激励响应函数,这里考虑离散的
定义
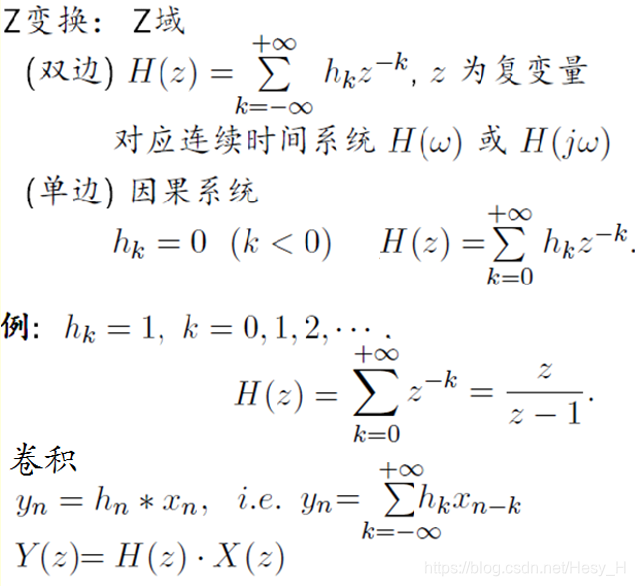
- H(w)是傅里叶变换中的,H(jw)是拉普拉斯变换中的
- 双边的就是从负无穷到正无穷
单边的就是从0到正无穷
离散时间线性时不变系统(初始0状态)
处理方法也是和之前一样有三种
第一种我们将微分改成差分 此处略去
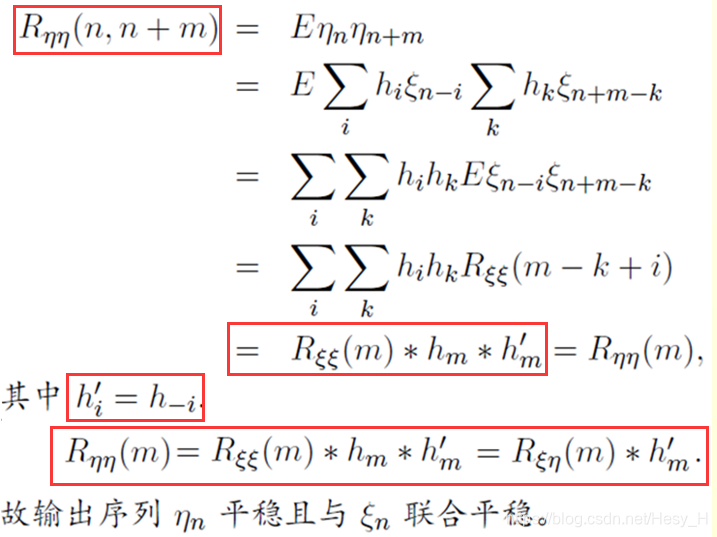
时域
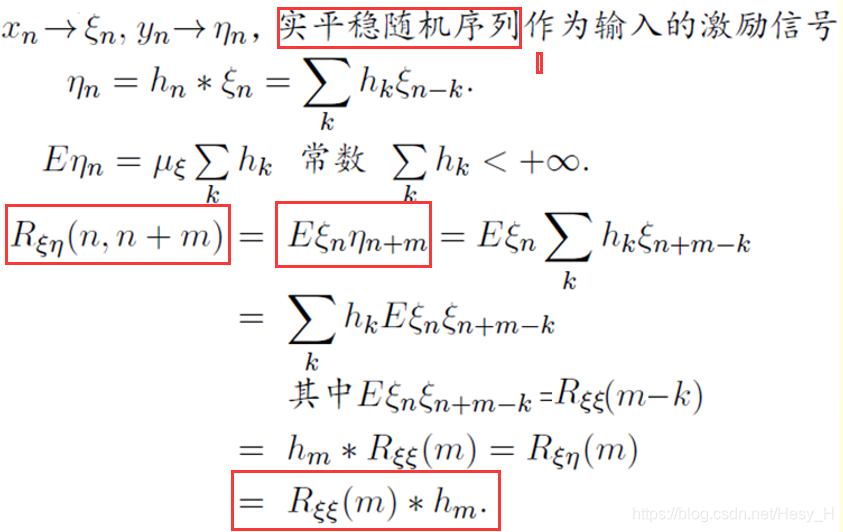
注意,这里的结论里面不再有共轭了 --》 输入是实平稳,所以第一步转换成期望的时候就咩有共轭,所以最后也没有共轭
类似的,另外一个互相关也咩有共轭,但是括号里面自变量的取负号还是要取的
频域 z域
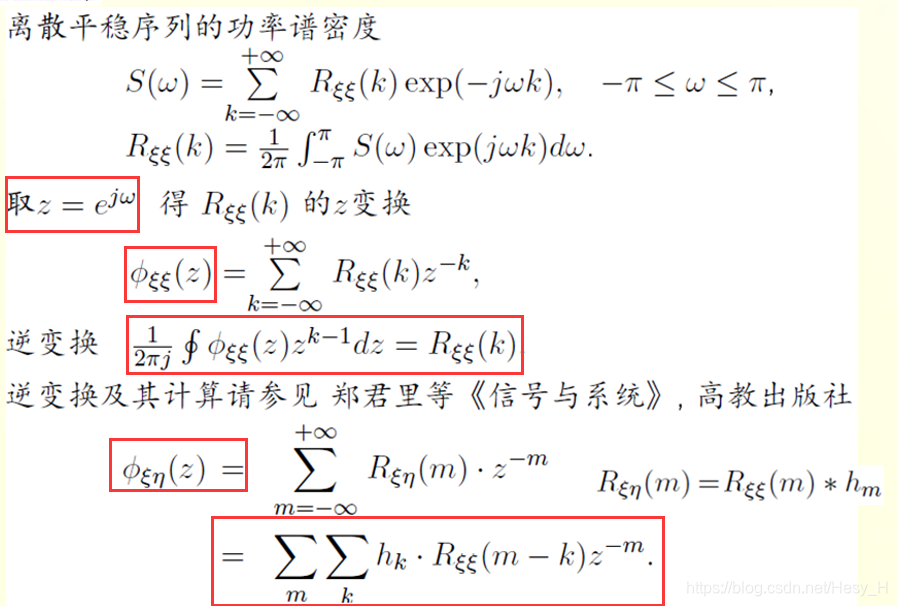
- 注意,这里换名字了,因为这里的函数的变量不是w了,所以不是功率谱函数
- z变化可以类比傅里叶变换俩理解,只不过傅里叶变化是卷积,算子是e-jwt,而Z变换是离散的乘积之和(注意,这里并不是离散的卷积,不要搞混),算子是z-k
这里的算子是笔者自己的定义,大家意会就好2333
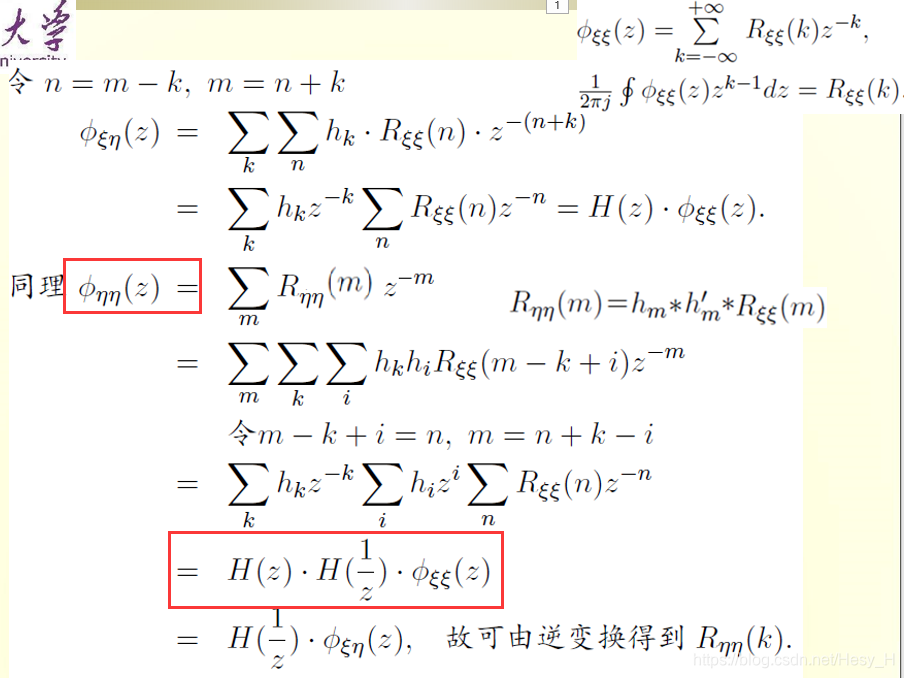
对比一下之前 连续输入情况下的
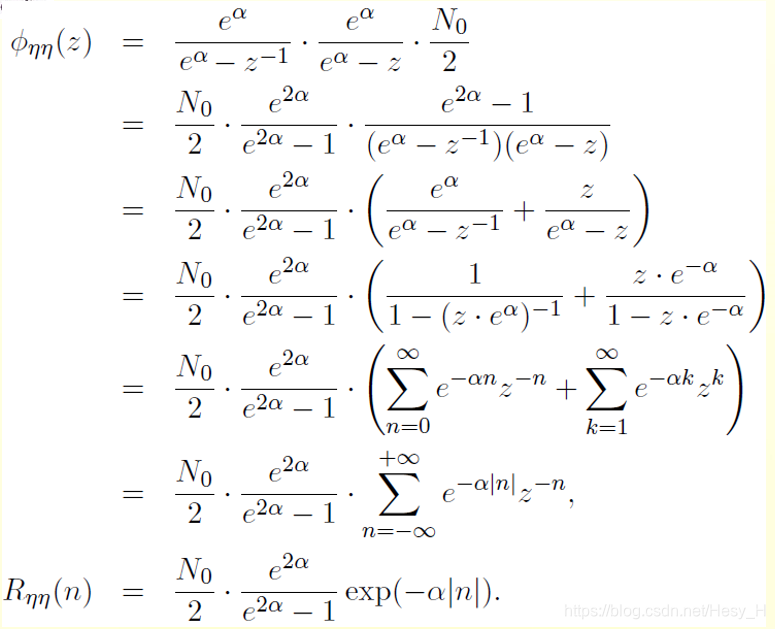
例

第一个框易得,第二个怎么来的呢?
不是利用傅里逆变换,利用的是:
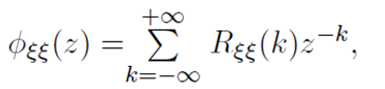
希望能把
拆成如上形式,所以就能直接用肉眼观察出Rξξ(k)了
如下是拆分过程
简单线性时不变系统下的研究
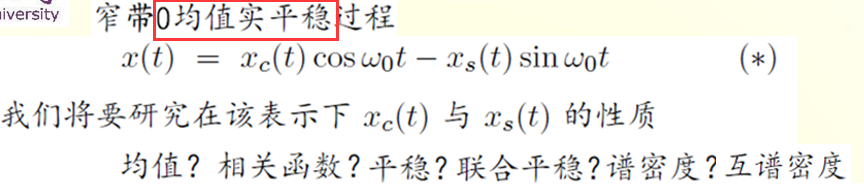
窄带信号
物理意义
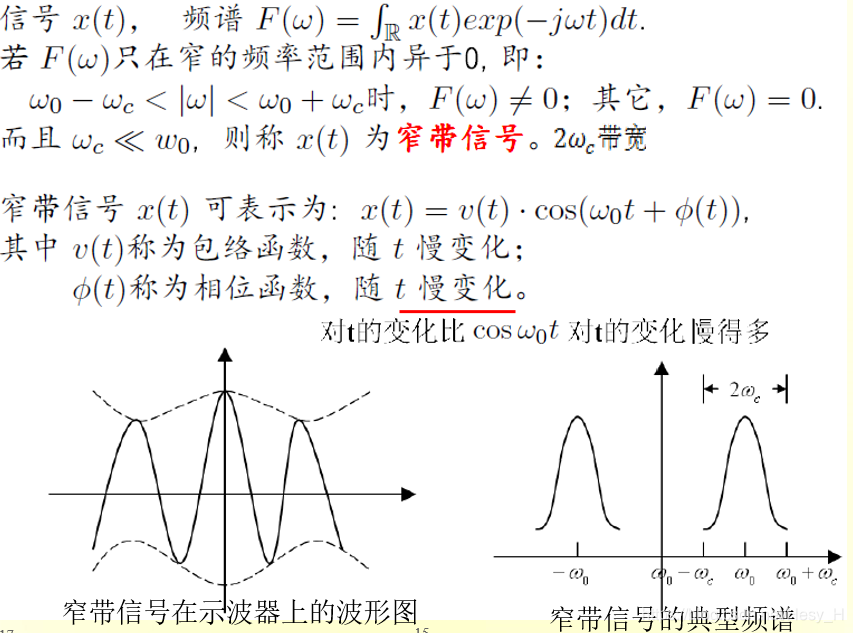
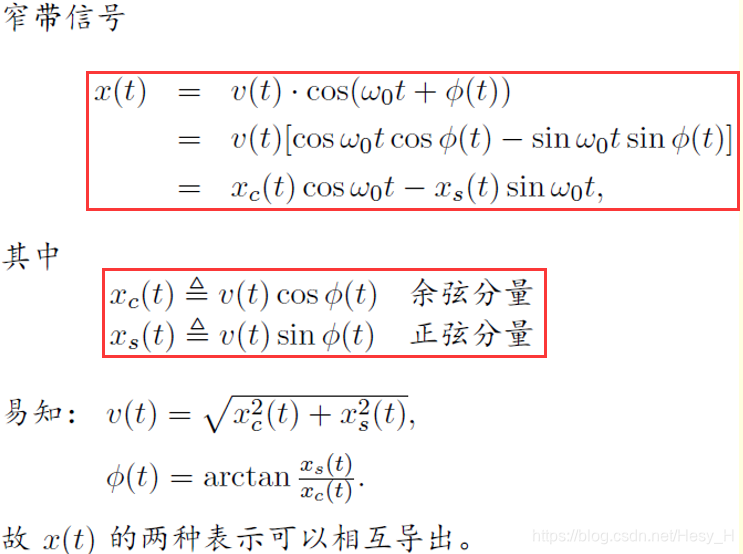
表示方法
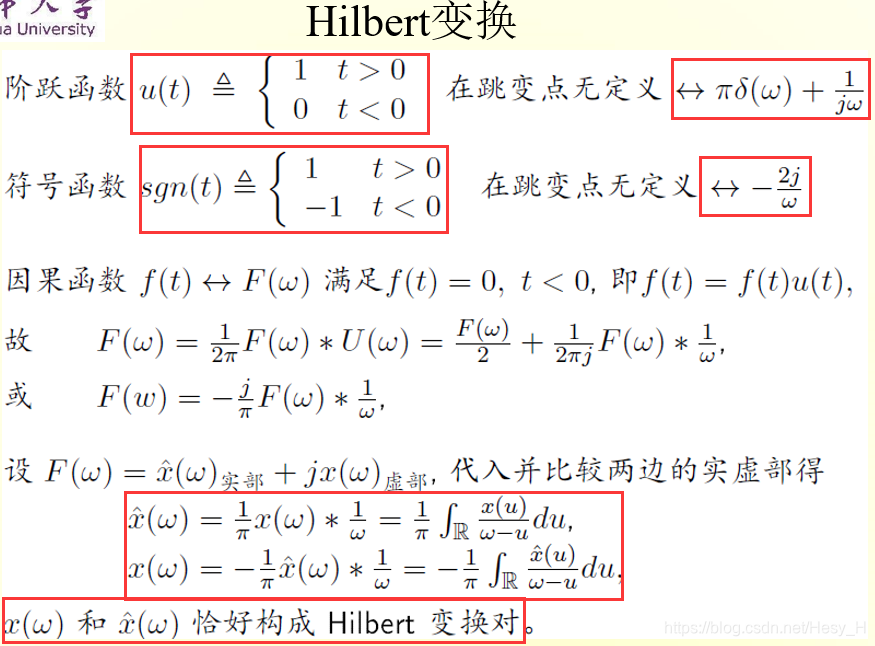
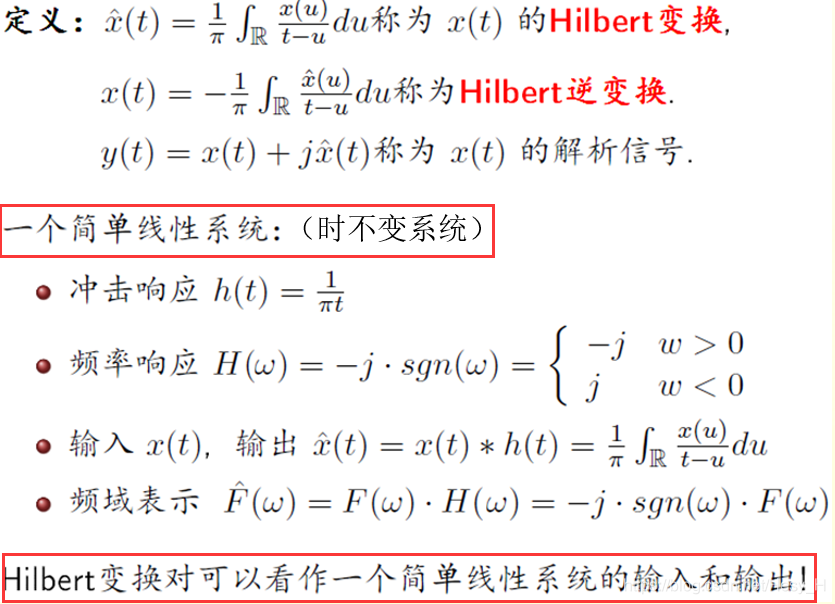
Hilbert变换 和 线性时不变系统的关系
引入目的
可以看作一个简单线性系统的输入和输出
定义
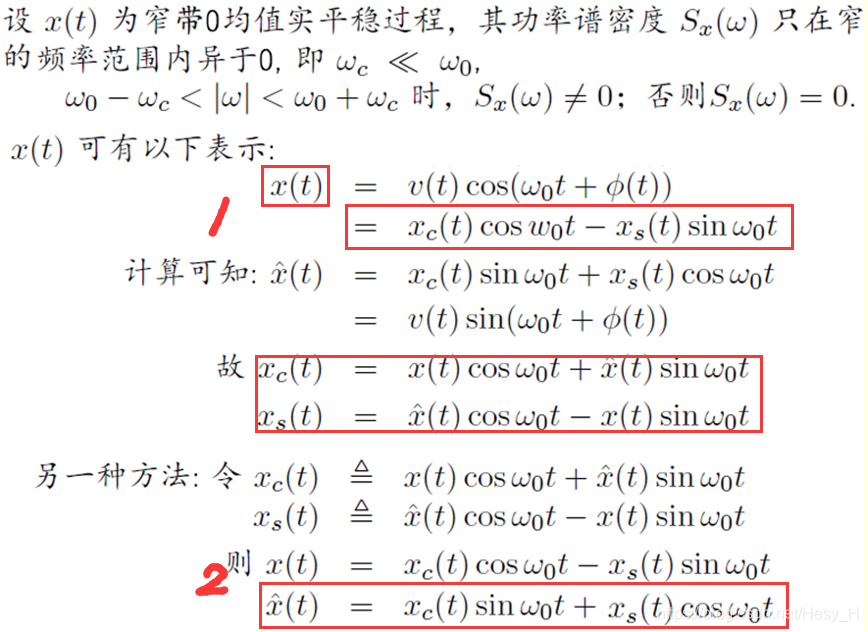
公式记忆方法:
当x?(t)下标( c或者s )和后面的三角函数一致的时候,符号就是负号(人生总是不完美的)【公式1】
当x?(t)下标( c或者s )和后面的三角函数不一致的时候,符号就是+(关一扇门,会开一扇窗)【公式2】
其中w0是常数
至于中间方框公式的记忆方法
eiθ=cosθ + i sinθ
xc就是这种表示方法,i是虚部,对应x^
xs就是由于sinθ前面乘的反而是实部( x(t) )了,所以此时要变成负号连接两项,但是cos项目还是在前面的
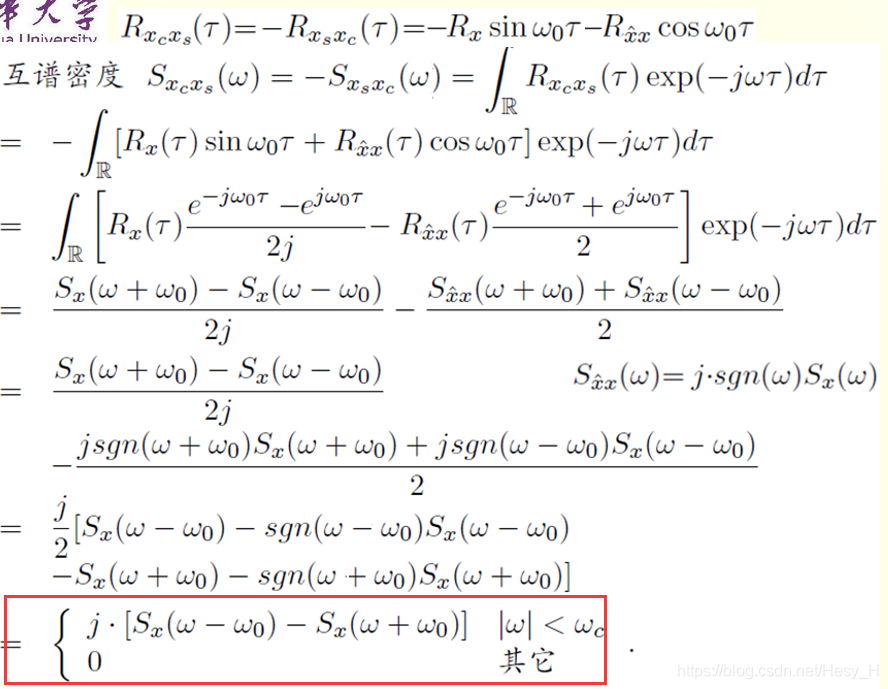
研究目标
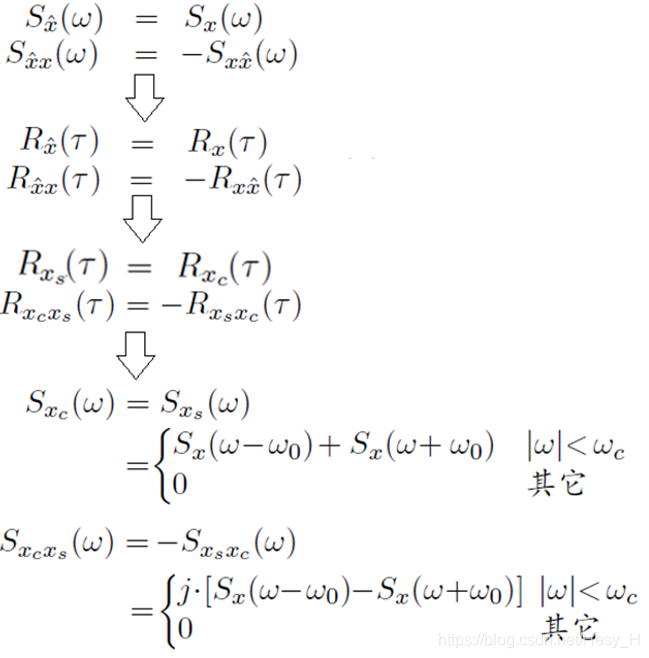
目前根据前面得到的结论有:
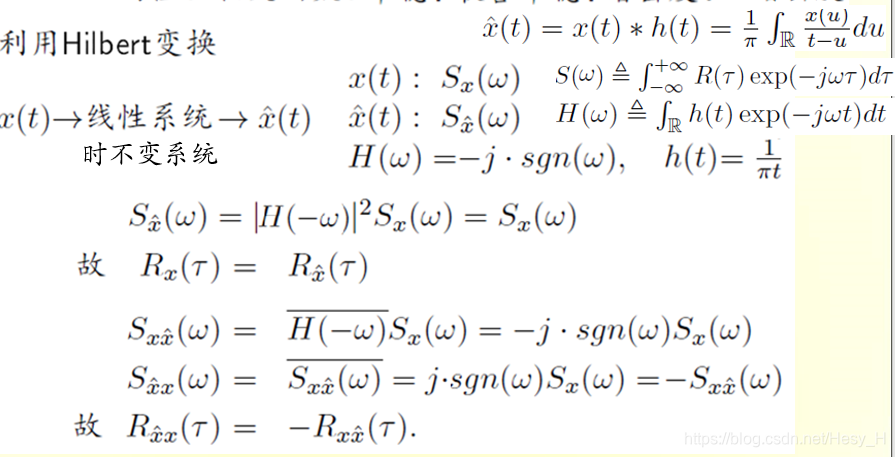
我们可以得到:
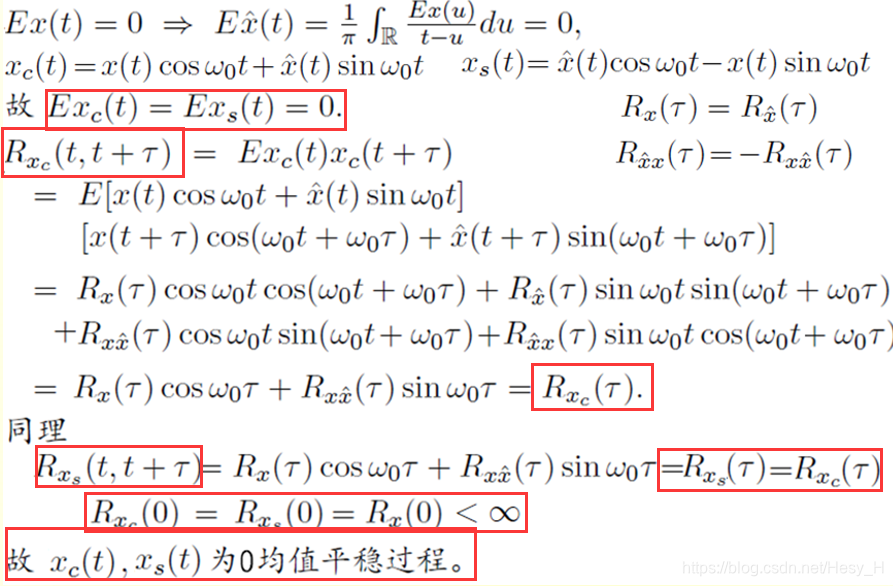
证明如下:
综上,Xs(t)和Xc(t)都是0均值的平稳过程
进一步,他们还是联合平稳的
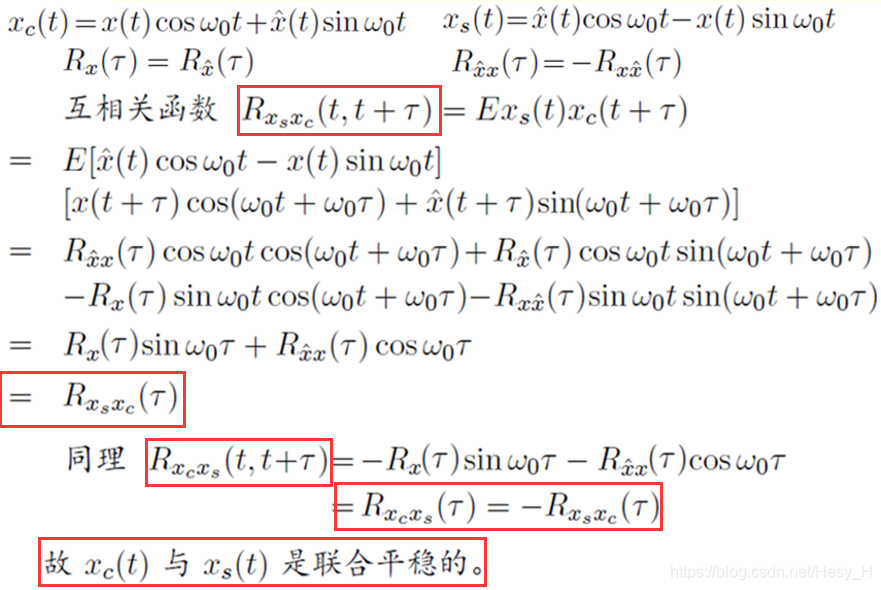
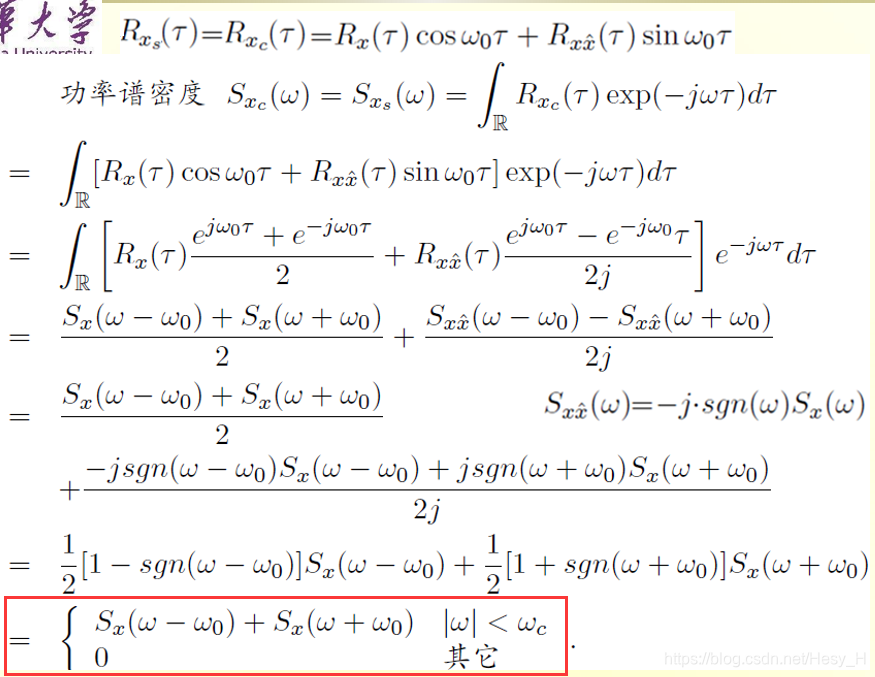
然后我们还可以利用如上结论证明:
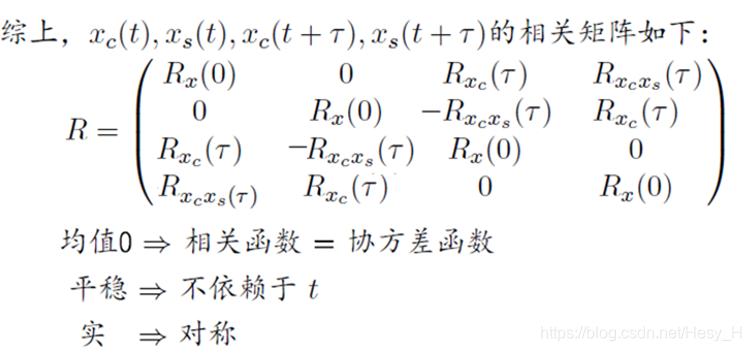
注意,我们之前研究的一直就是0均值的平稳输入过程
