阅读amcl_ros2版本源码
源码git地址:https://github.com/ros2/navigation.git
首先阅读amcl_node.cpp
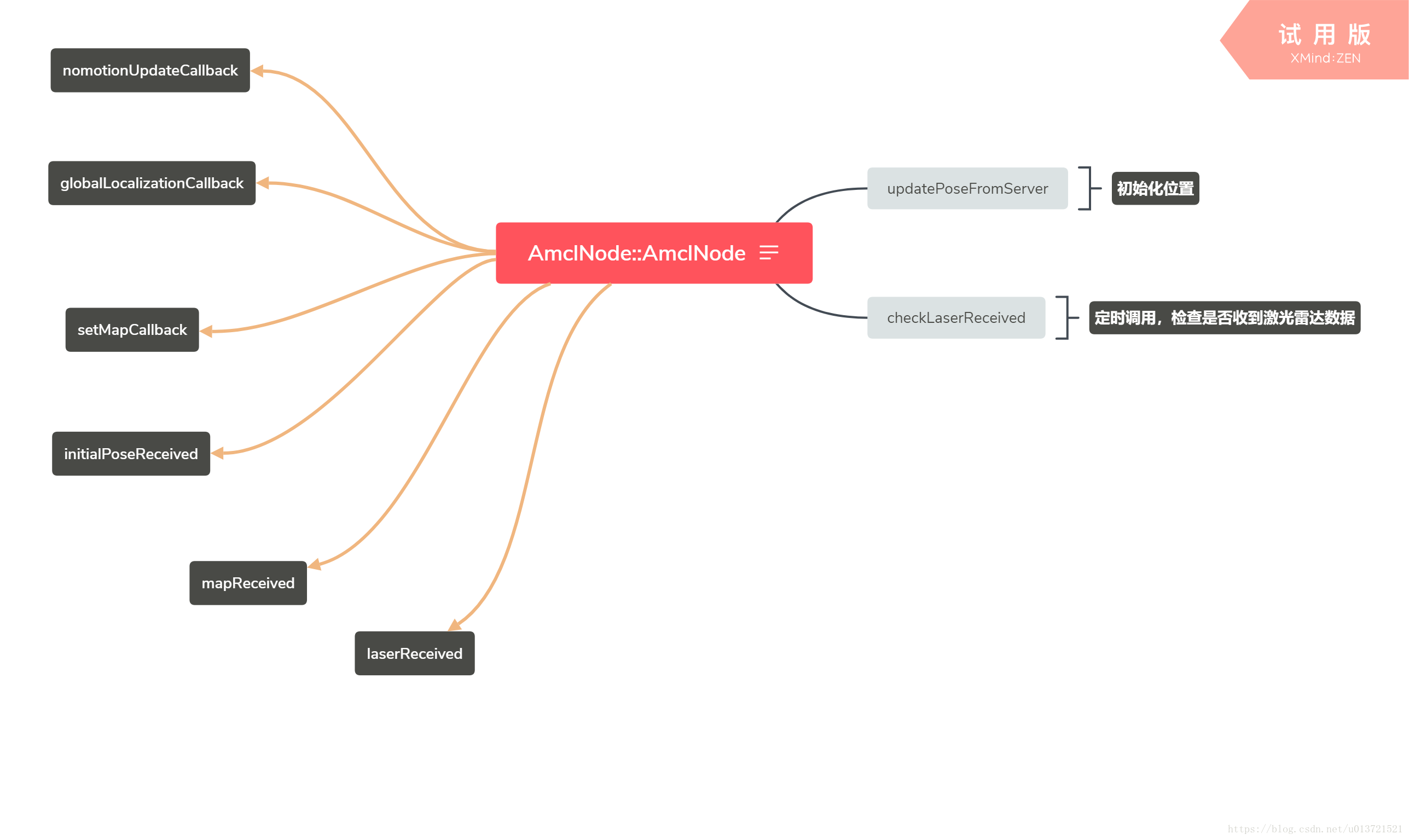
这个文件结构比较清晰,主函数中调用AmclNode构造函数,这个函数主要干了这么几件事:读取参数,初始化位置,发布/订阅话题(发布话题:amcl_pose,particlecloud)(订阅话题:initialpose,map)(服务:global_localization,request_nomotion_update,set_map)调用关系大概是这样的:
最关键的一个函数是激光雷达话题的回调函数,所有算法在这里运行。来看laserReceived函数都在干啥:
- 首先获取了laser相对于baselink的tf
- 然后获取了baselink相对于odom的tf,这样就知道laser在世界坐标系下的位置可以继续进行匹配了。
- 接下来分为两种情况,pf是否第一次运行,如果是第一次就将里程计值赋给pf_odom_pose_。如果是正常迭代过程,则计算里程计变化值,并判断里程计变化是不是达到了我们要进行更新的阈值。
- 里程计运动达到更新阈值即调用UpdateAction()函数,打开该函数,这里可以看出来是根据设置的运动预测模型进行采样,这就是粒子滤波的预测模型了。
- 然后回到laserReceived函数中,读取了激光数据后,将最大范围与最小范围传给amcl_laser。然后由于amcl算法并未对最小距离做处理,因此如果小于range_min就赋值为range_max做与max同样处理。之后处理好的数据调用UpdateSensor,将激光数据上传,我们打开这个函数
- UpdateSensor对于激光数据处理,根据模型不同调用了pf_update_sensor,一般情况下,激光观测模型为LikelihoodFieldModel这个经典模型。这里根据似然域来做更新。
- 看一下LikelihoodFieldModel这个函数,这里我理解的是由于里程计运动大于一定值才进行预测及更新,这里会取与里程计时间相近的一次激光,模型里计算流程大概是:对于每一个粒子,首先计算激光坐标系,然后滤去大于max_range的激光点(这里由于上一步的处理,连min_range一起滤掉了),滤去not a number,计算每一束激光落点栅格,计算落点栅格与地图上障碍点最近曼哈顿距离,根据激光测距的高斯模型概率,每个粒子权重为每一束激光单独扫描的乘积,再计算总权重。这里是激光观测模型的计算流程。
- 回到laserReceived函数中,这里完成更新部分之后进行重采样,重采样函数为pf_update_resample()函数。重采样的方法比较经典,根据w值增加了一部分随机生成的粒子,当drand48<w_diff,随机均匀在地图范围内产生一个粒子。这里是调用uniformPoseGenerator产生的。而drand48>w_diff时,将PDF积分得到CDF,然后drand48来对应离散CDF中采样,这样drand48落在哪个点上就把哪个粒子复制一份,将所有粒子权重置为1,完成重采样。然后对每个粒子权重进行归一化,重置fast和slow,重新计算统计数据(均值,方差)
- 回到laserReceived函数中,最后一步是发布计算好的点云数据。