一、说明
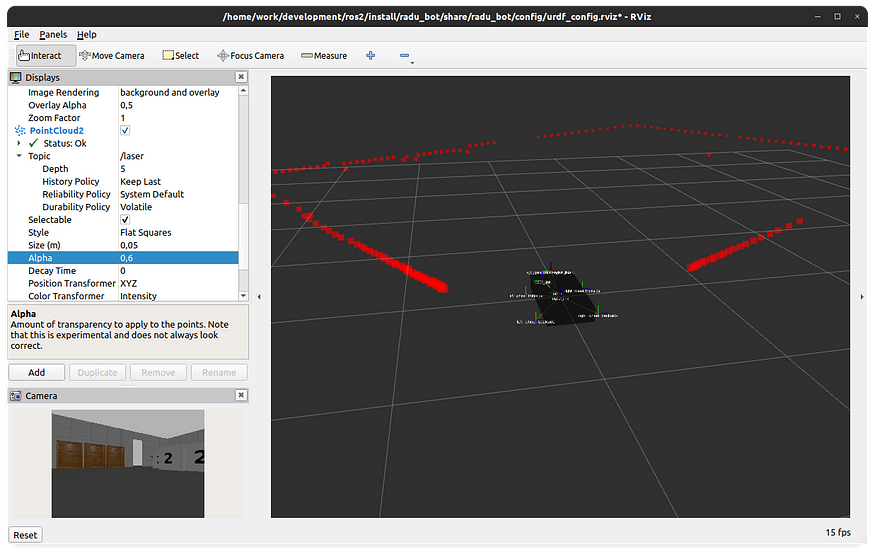
RViz和Gazebo中RADU的模拟进展顺利。在本文中,我们将添加两个视觉传感器。首先,一个图像摄像机,用于在机器人四处移动时查看机器人的实时馈送。其次,深度摄像头传感器,它输出点云,这是机器人周围环境的距离测量,其中颜色表示物体的距离。这两个传感器有助于2D导航和
RViz和Gazebo中RADU的模拟进展顺利。在本文中,我们将添加两个视觉传感器。首先,一个图像摄像机,用于在机器人四处移动时查看机器人的实时馈送。其次,深度摄像头传感器,它输出点云,这是机器人周围环境的距离测量,其中颜色表示物体的距离。这两个传感器有助于2D导航和