点云3种法向量估计方法及可视化
1)点云读取可视化
原始点云:
2)下采样可视化
下采样:

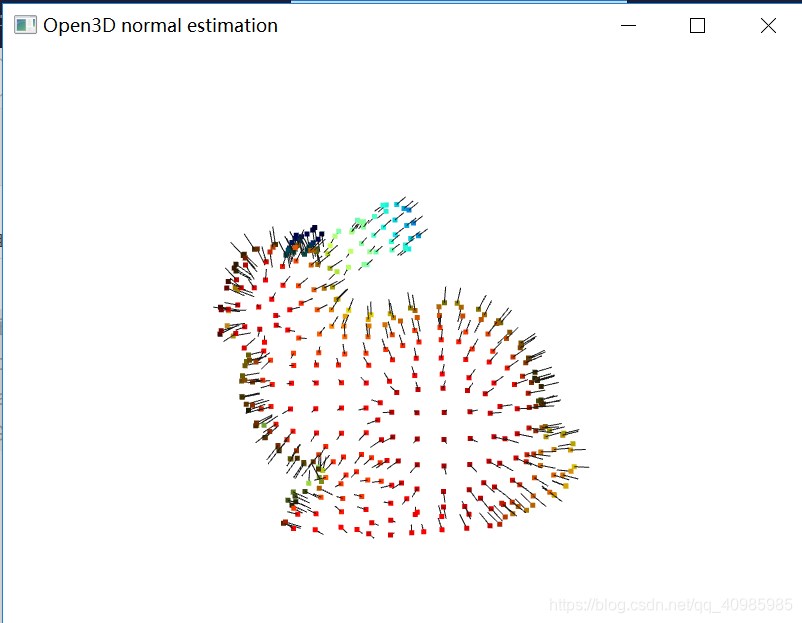
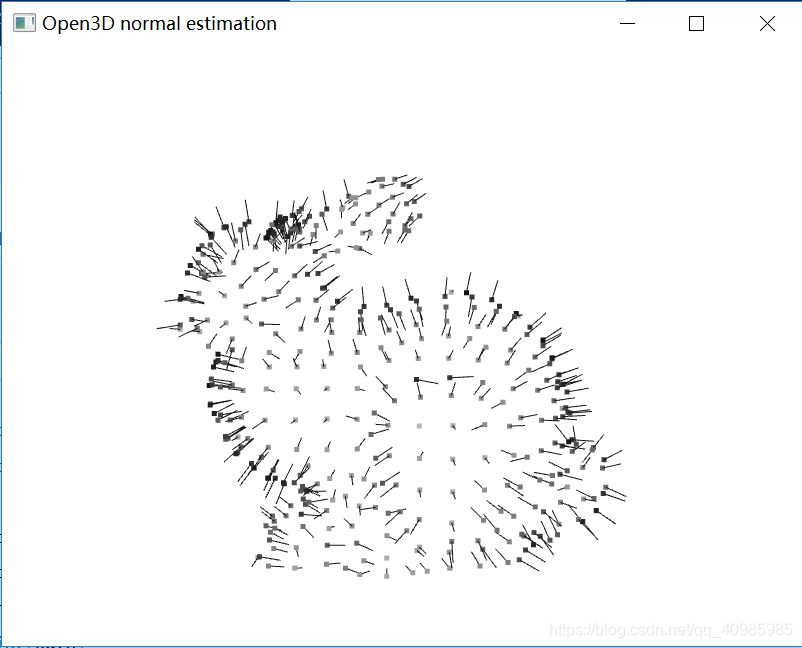
3)法向量三种估计方式(K近邻估计,半径近邻估计,混合搜索估计)
K近邻估计法向量并可视化:
混合搜索近邻估计可视化
4)点云每个点对应的法向量点存储及可视化
法向量对应的点可视化:
5)法向量点和原始点云同时可视化
原始点云灰色,法向量点绿色
扫描二维码关注公众号,回复:
12699260 查看本文章

6)源码
# @Description: <Open3D估计法向量,可视化,存储为文件>
import open3d as o3d
import os
path = os.path.abspath(os.path.join(os.getcwd(), "../"))
path = path + "/pcds/bunny.pcd"
normalPath = path.replace(".pcd", "_normal.pcd")
print(path)
print(normalPath)
print("Load a pcd point cloud, print it, and render it")
pcd = o3d.io.read_point_cloud(path)
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 把所有点渲染为灰色(灰兔子)
print(pcd) # 输出点云点的个数
# print(o3d.np.asarray(pcd.points)) # 输出点的三维坐标
o3d.visualization.draw_geometries([pcd], "Open3D origin points", width=800, height=600, left=50, top=50,
point_show_normal=False, mesh_show_wireframe=False,
mesh_show_back_face=False)
print("Downsample the point cloud with a voxel of 0.002")
downpcd = pcd.voxel_down_sample(voxel_size=0.002) # 下采样滤波,体素边长为0.002m
print(downpcd)
o3d.visualization.draw_geometries([downpcd], "Open3D downsample points", width=800, height=600, left=50, top=50,
point_show_normal=False, mesh_show_wireframe=False,
mesh_show_back_face=False)
print("Recompute the normal of the downsampled point cloud")
# 混合搜索 KNN搜索 半径搜索
# downpcd.estimate_normals(
# search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.01, max_nn=20)) # 计算法线,搜索半径1cm,只考虑邻域内的20个点
downpcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamKNN(knn=20)) # 计算法线,只考虑邻域内的20个点
# downpcd.estimate_normals(
# search_param=o3d.geometry.KDTreeSearchParamRadius(radius=0.01)) # 计算法线,搜索半径1cm,只考虑邻域内的20个点
o3d.visualization.draw_geometries([downpcd], "Open3D normal estimation", width=800, height=600, left=50, top=50,
point_show_normal=True, mesh_show_wireframe=False,
mesh_show_back_face=False) # 可视化法线
print("Print a normal vector of the 0th point")
print(downpcd.normals[0]) # 输出0点的法向量值
print("Print the normal vectors of the first 10 points")
print(o3d.np.asarray(downpcd.normals)[:10, :]) # 输出前10个点的法向量
# std::vector<Eigen::Vector3d> with 381 elements. 转换为nparry 以打印访问
# normals = o3d.np.asarray(downpcd.normals)
# print(normals)
# 可视化法向量的点,并存储法向量点到文件
normal_point = o3d.utility.Vector3dVector(downpcd.normals)
normals = o3d.geometry.PointCloud()
normals.points = normal_point
normals.paint_uniform_color((0, 1, 0)) # 点云法向量的点都以绿色显示
o3d.visualization.draw_geometries([pcd, normals], "Open3D noramls points", width=800, height=600, left=50, top=50,
point_show_normal=False, mesh_show_wireframe=False,
mesh_show_back_face=False)
o3d.io.write_point_cloud(normalPath, normals)