首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
双视图下Bundle Adjustment重投影误差的雅可比矩阵
其他
2019-10-09 18:44:30
阅读次数: 0
(一)建立问题模型
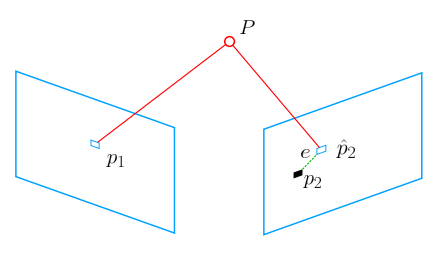
以第一帧的相机坐标系为世界坐标系,世界坐标系中存在n个空间点P,其在第二帧的投影点为p,现在希望求出相机的位姿R,t
a
a
猜你喜欢
转载自
www.cnblogs.com/npulzb/p/11643498.html
双视图下Bundle Adjustment重投影误差的雅可比矩阵
史上最简SLAM零基础解读(7) - Jacobian matrix(雅可比矩阵) → 理论分析与应用详解(Bundle Adjustment)
Bundle Adjustment---即最小化重投影误差(高翔slam---第七讲)
雅可比矩阵
雅可比矩阵(整理)
matlab 雅可比矩阵求取
简介雅可比矩阵(Jacobian)
雅可比矩阵与海森矩阵
【MATLAB】雅可比矩阵jacobi matrix
Bundle Adjustment
黑塞矩阵和雅可比矩阵理解
重投影误差
学习笔记之——Jacobian matrix(雅可比矩阵)
ROS moveit roscpp获取机械臂雅可比矩阵
机器人学回炉重造(2-3):基本雅可比矩阵与其他雅可比矩阵
Matlab 自编雅可比矩阵 (jacobi) 函数与官方的Jacobian matrix(雅可比矩阵)函数对比及创新
Bundle Adjustment简述(转载)
VIO的Bundle Adjustment推导
Bundle Adjustment简述
Bundle adjustment学习
bundle adjustment 详解
WebGL模型视图投影矩阵
OSG:视图矩阵, 投影矩阵和WindowMatrix
机器人学基础(2)-微分运动和速度-雅可比矩阵计算、雅可比矩阵求逆、计算关节运动速度
求导——向量——梯度;海森矩阵(Hessian Matrix);雅可比矩阵(Jacobi Matrix)
多视图几何——相机重投影
bundle adjustment算法学习
cvsba 编译与bundle adjustment 测试
范德蒙行列式、克拉默法则、雅可比矩阵
VINS-Mono IMU 预积分公式及协方差、雅可比矩阵传递推导
今日推荐
《美国对全球网络空间安全与发展的威胁和破坏》报告发布
火速冲上 GitHub 热榜 —— 开源编程语言、框架哪有这么可爱?
北京人形机器人创新中心发布全球首个纯电驱拟人奔跑的全尺寸人形机器人“天工”
LFOSSA 源来如此公开课 | 掌握云原生未来:CNCF 认证全面攻略与备考秘籍
国产云输入法——仅华为无云端数据上传安全问题
周排行
Python环境安装与基础语法(1)——计算机基础知识
IMU预积分
ADAS中的LDW、FCW、BSD、LCA、ACC、AEB、APA、DMS代表的含义
B站笔试两道题
skyeye arm 硬件虚拟机环境的搭建
Web前端静态页面示例
数组-合并排序数组 II-简单
springcloud之版本问题启动报错
面向对象-------------匿名对象(六)
输入URL到页面呈现中间发生了什么?
每日归档
更多
2024-04-30(1)
2024-04-29(40)
2024-04-28(0)
2024-04-27(56)
2024-04-26(39)
2024-04-25(22)
2024-04-24(36)
2024-04-23(26)
2024-04-22(39)
2024-04-21(0)