从一个运行的ROS系统中记录topic的数据,这个topic数据会在一个bag文件中积累。
1,以乌龟的教程为例子,先启动下面的节点等
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
2,录制数据
mkdir ~/bagfiles cd ~/bagfiles rosbag record -a
这个时候,去使用键盘的上下左右按键,让乌龟动起来。
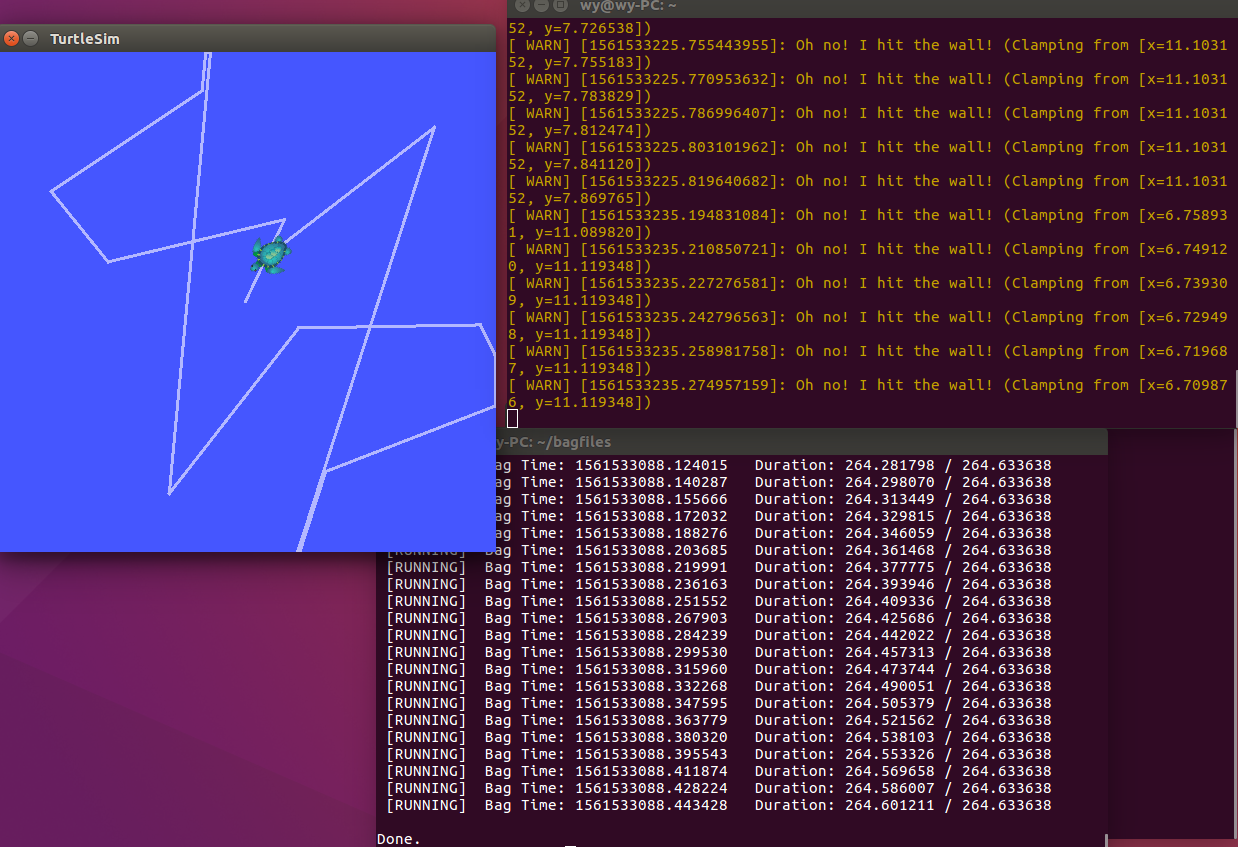
3,回放bag包的数据,由于我这里生成的bag是按照时间命名的,所以就是下面这个啦
rosbag play 2019-06-26-15-07-03.bag
截图如下: