1.rosbag命令
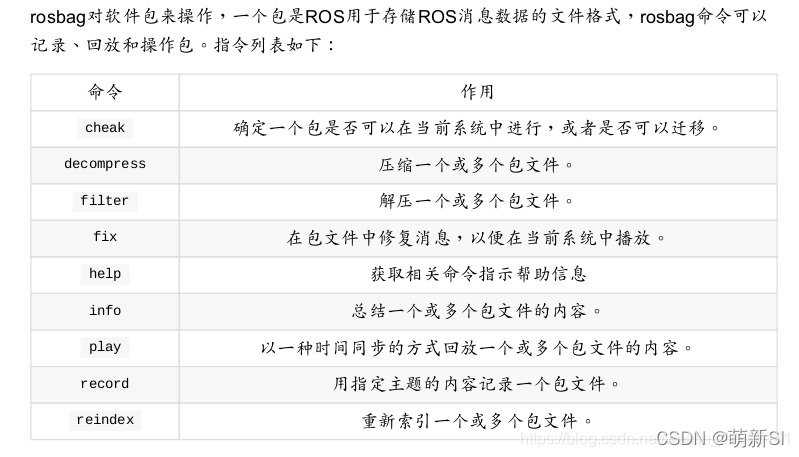
2.rosbag简介
rosbag 既可以指命令行中数据包相关命令,也可以指 c++/python 的 rosbag 库。这里的 rosbag 是指前者。
rosbag 主要用于记录、回放、分析 rostopic 中的数据。它可以将指定 rostopic 中的数据记录到 .bag 后缀的数据包中,便于对其中的数据进行离线分析和处理。
对于 subscribe 某个 topic 的节点来说,它无法区分这个 topic 中的数据到底是实时获取的数据还是从 rosbag 中回放的数据。这就有助于我们基于离线数据快速重现曾经的实际场景,进行可重复、低成本的分析和调试。
3.rosbag 录制使用
rosbag record /topic_name 录制话题
rosbag record -b 4092 /topic_name 扩大录制内存限制
Record a bag file with the contents of specified topics.
Options:
-h, --help show this help message and exit
-a, --all record all topics
-e, --regex match topics using regular expressions
-x EXCLUDE_REGEX, --exclude=EXCLUDE_REGEX
exclude topics matching the follow regular expression
(subtracts from -a or regex)
-q, --quiet suppress console output
-o PREFIX, --output-prefix=PREFIX
prepend PREFIX to beginning of bag name (name will
always end with date stamp)
-O NAME, --output-name=NAME
record to bag with name NAME.bag
--split split the bag when maximum size or duration is reached
--max-splits=MAX_SPLITS
Keep a maximum of N bag files, when reaching the
maximum erase the oldest one to keep a constant number
of files.
--size=SIZE record a bag of maximum size SIZE MB. (Default:
infinite)
--duration=DURATION record a bag of maximum duration DURATION in seconds,
unless 'm', or 'h' is appended.
-b SIZE, --buffsize=SIZE
use an internal buffer of SIZE MB (Default: 256, 0 =
infinite)
--chunksize=SIZE Advanced. Record to chunks of SIZE KB (Default: 768)
-l NUM, --limit=NUM only record NUM messages on each topic
--node=NODE record all topics subscribed to by a specific node
-j, --bz2 use BZ2 compression
--lz4 use LZ4 compression
--tcpnodelay Use the TCP_NODELAY transport hint when subscribing to
topics.
--udp Use the UDP transport hint when subscribing to topics.
rosbag record --all 录制全部话题
rosbag record -O (大写)录制包重命名
rosbag record -o (小写)为数据加前缀
4.rosbag 回放使用
rosbag info 查看话题名称、类型、消息数量
rosbag play name.bag 回放数据包
rosbag play -r 3 name.bag 3倍速回放,按一定频率回放,-r选项用来设定消息发布速率;
rosbag play name.bag -l 按一定频率回放,-l选项用来设定循环播放;
rosbag play name.bag --topic /topic1 只播放感兴趣的topic;
-d 用来指定延迟播放的时间(sec);
-s参数用来指定从几秒开始;rosbag play -s 10 xx.bag
-u 参数表示仅播放包的前几秒信息;rosbag play -u 10 xx.bag
-r 参数用来指定播放速度
-l 循环播放