掌握rosbag工具,编写python包录制、读取、截断和回放样例
1 资料
本章是本人的ROS高效入门系列的最后一章,也是上一章节 ROS高效入门第八章 – 掌握rosbag工具,编写c++包录制、读取、截断和回放样例 的姊妹篇,使用 python 重新实现 bag录制,读取,截断和回放四个样例。参考资料是一样的:
(1)《机器人操作系统(ROS)浅析》[美] Jason M. O’Kane 著 肖军浩 译,第9章
(2)ros Tutorials 初级教程的10,17和18节: ros Tutorials
(3)chatgpt 4.0 (chatGPT少不了)
2 正文
2.1 python 录包样例
(1)创建 rosbag_test 软件包和文件,这个软件包将实现bag录制,读取,截断和回放四个功能,这里先讲解bag录制,实现功能与上一章节c++版是完全一样的。
cd ~/catkin_ws/src/cpp
// topic_tools 是用来写rosbag play程序用的
catkin_create_pkg rosbag_test rosbag turtlesim roslib roscpp rospy
cd rosbag_test
mkdir scripts launch
touch launch/start_record.launch scripts/bag_record.py
(2)编写bag_record.py
#! /usr/bin/env python3
import rosbag
import rospy
import argparse
import logging
from datetime import datetime
import roslib.message
from threading import Lock
import signal, sys
logging.basicConfig(level=logging.DEBUG)
class BagRecord(object):
def __init__(self, output_bag, topic_infos):
self.__output_bag = output_bag
self.__topic_infos = topic_infos
self.__subscribers = []
# __Lock is to protect bag write and bag close in two thread
# in python, this is necessary !
self.__Lock = Lock()
self.__bag = rosbag.Bag(self.__output_bag, "w")
signal.signal(signal.SIGINT, self.signal_handler)
// 不同于cpp,python中多个回调函数是并发执行的,因此需要加上互斥锁保护__bag句柄
# msg must be placed before topic !!
def topic_callback(self, msg, topic):
self.__Lock.acquire()
try:
self.__bag.write(topic, msg, rospy.Time.now())
except Exception as e:
// 当CTRL+C关闭__bag后,这里会发生写错误,所以需要捕捉下,避免影响程序正常结束
rospy.logerr("%s" %e)
self.__Lock.release()
// 使用 rospy.get_published_topics() 和 roslib.message.get_message_class() 可以在不知道消息类型的情况下,创建subscriber,关键!!
def start_recorder(self):
for topic, topic_type in self.__topic_infos:
msg_class = roslib.message.get_message_class(topic_type)
self.__subscribers.append(rospy.Subscriber(topic, msg_class, self.topic_callback, topic))
// 由于python中写bag是并发执行的,因此当用户ctrl+c结束录包时,也是异步关闭__bag,因此也需要加锁保护,否则bag就是残损的,无法正确读出来
def signal_handler(self, sig, frame):
rospy.loginfo("ctrl+c, close bag")
self.__Lock.acquire()
self.__bag.close()
self.__Lock.release()
sys.exit(0)
def main():
// 支持录制特定topic,或者录制当前活跃的所有topic
parser = argparse.ArgumentParser(description="record topic to rosbag")
parser.add_argument("-O", "--output_bag", type=str, help="specify rosbag")
parser.add_argument("-t", "--topics", nargs="+", type=str, help="specify topic")
parser.add_argument("-a", "--all", action="store_true", help="record all topic")
parser.add_argument('extra_args', nargs='*', help=argparse.SUPPRESS)
args=parser.parse_args()
// -t 和 -a 必须给出一个
if not args.all and not args.topics:
logging.error("please specify topic using -t or -a")
return
rospy.init_node("bag_recorder")
// 默认以时间戳作为bag名
output_bag = datetime.now().strftime("%Y-%m-%d-%H-%M-%S") + ".bag"
if args.output_bag:
output_bag = args.output_bag
// 如果 -a 和 -t 同时出现,以 -a 为准
topic_infos = []
if args.all:
topic_infos = rospy.get_published_topics()
elif args.topics:
topic_infos = [(topic, msg_class) for topic, msg_class in rospy.get_published_topics() if topic in args.topics]
recorder = BagRecord(output_bag, topic_infos)
rospy.loginfo("start recorder...")
recorder.start_recorder()
rospy.spin()
if __name__ == "__main__":
main()
(3)编写start_record.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
required="true"
/>
<node
pkg="turtlesim"
type="draw_square"
name="draw_square"
required="true"
/>
<node
pkg="rosbag_test"
type="bag_record.py"
name="bag_recorder"
output="screen"
launch-prefix="bash -c 'sleep 5; $0 $@'"
args="-O /home/ycao/Study/ros_noetic/bag_dir/square_1.bag -a"
/>
</launch>
(4)编译并运行
cd ~/catkin_ws/
catkin_make --source src/python/rosbag_test/
source devel/setup.bash
rosbag_test start_record.launch
2.2 python 查看包样例
(1)创建并编写bag_echo.py
cd ~/catkin_ws/src/python/rosbag_test
touch scripts/bag_echo.py
bag_echo.py
#! /usr/bin/env python3
import os
import argparse
import logging
import rosbag
logging.basicConfig(level=logging.DEBUG)
class BagEcho(object):
def __init__(self, bag, topics):
self.__bag = bag
self.__topics = topics
def echo_bag(self):
msg_cnts = {
}
bag = rosbag.Bag(self.__bag, "r")
for topic, msg, t in bag.read_messages(topics=self.__topics, raw=False):
if topic not in msg_cnts:
msg_cnts[topic] = 1
else:
msg_cnts[topic] += 1
print("----------[%s]---------" %topic)
// python查看消息内容远比c++方便的多,使用bag.read_messages(),直接就能打印出来,不需要引入任何消息类型
// 而且速度远快于命令行工具:rostopic echo -b ***.bag,但略慢于c++版。
print(msg)
bag.close()
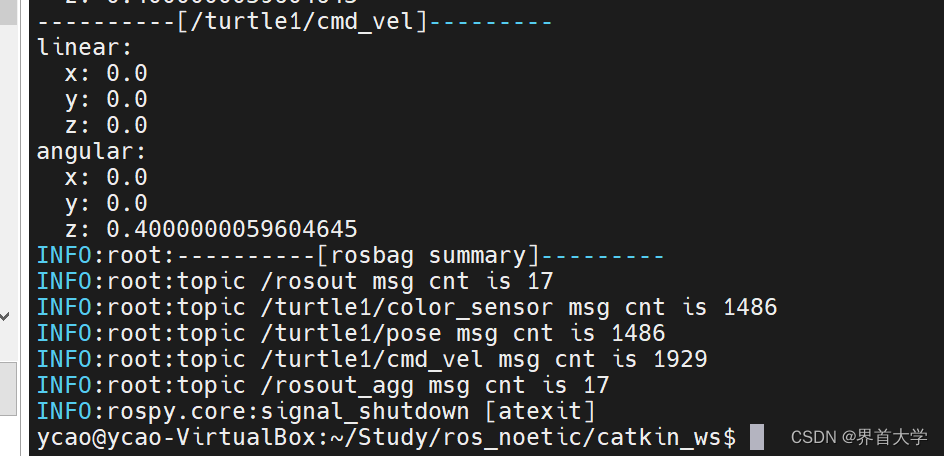
logging.info("----------[rosbag summary]---------")
for topic in msg_cnts:
logging.info("topic %s msg cnt is %d" %(topic, msg_cnts[topic]))
def main():
// 支持查看指定topic,如果不指定,默认查看所有topic内容。c++版要求必须给出topic,没有默认选项。
parser = argparse.ArgumentParser(description="echo rosbag depends topic")
parser.add_argument("-b", "--bag", type=str, required=True, help="specify rosbag")
parser.add_argument("-t", "--topics", nargs="+", type=str, help="specify topic")
parser.add_argument('extra_args', nargs='*', help=argparse.SUPPRESS)
args=parser.parse_args()
if not os.path.isfile(args.bag):
logging.error("%s is not found!" %args.bag)
return
echo = BagEcho(args.bag, args.topics)
echo.echo_bag()
if __name__ == "__main__":
main()
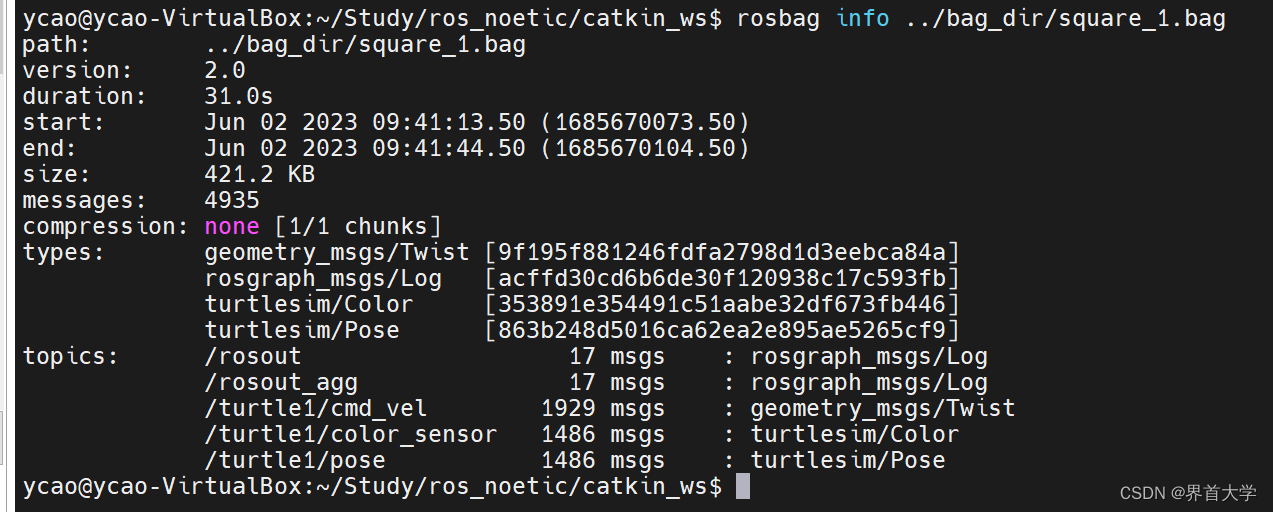
(2)编译并运行
cd ~/catkin_ws/
catkin_make --source src/python/rosbag_test/
source devel/setup.bash
./devel/lib/rosbag_test/bag_echo.py -b ../bag_dir/square_1.bag
./devel/lib/rosbag_test/bag_echo.py -b ../bag_dir/square_1.bag -t /rosout
2.3 python 截取包样例
(1)创建并编写bag_filter.py
cd ~/catkin_ws/src/python/rosbag_test
touch scripts/bag_filter.py
bag_filter.py
#! /usr/bin/env python3
import os
import argparse
import rosbag
import logging
logging.basicConfig(level=logging.DEBUG)
class BagFilter(object):
def __init__(self, input_bag, output_bag, start_offset, end_offset, topics):
self.__input_bag = input_bag
self.__output_bag = output_bag
self.__start_offset = start_offset
self.__end_offset = end_offset
self.__topics = topics
def filter_bag(self):
inbag = rosbag.Bag(self.__input_bag, "r")
start_time = inbag.get_start_time() + self.__start_offset
end_time = inbag.get_end_time() - self.__end_offset
with rosbag.Bag(self.__output_bag, "w") as outbag:
// 如果不指定 -t ,这里的self.__topics就是空,read_messages()就会把全量topic读出来,很方便
for topic, msg, t in inbag.read_messages(topics=self.__topics, raw=False):
if start_time <= t.to_sec() <= end_time:
outbag.write(topic, msg, t)
logging.info("------------[%s summary]------------" %self.__output_bag)
logging.info("time span %f [origin %f]" %(end_time-start_time, inbag.get_end_time()-inbag.get_start_time()))
topic_list = [topic for topic in outbag.get_type_and_topic_info()[1].keys()]
logging.info("topic list %s" %topic_list)
inbag.close()
def main():
// 支持前后时间偏移截取,支持提取指定topic
parser = argparse.ArgumentParser(description="filter rosbag depends time offset and topics")
parser.add_argument("-i", "--input_bag", type=str, required=True, help="specify input rosbag")
parser.add_argument("-o", "--output_bag", type=str, required=True, help="specify output rosbag")
parser.add_argument("-s", "--start_offset", type=int, default=0, help="specify start offset time")
parser.add_argument("-e", "--end_offset", type=int, default=0, help="specify end offset time")
parser.add_argument("-t", "--topics", nargs="+", type=str, help="specify topic")
parser.add_argument('extra_args', nargs='*', help=argparse.SUPPRESS)
args=parser.parse_args()
if not os.path.isfile(args.input_bag):
logging.error("%s is no found!" %args.input_bag)
return
filter = BagFilter(args.input_bag, args.output_bag, args.start_offset, args.end_offset, args.topics)
filter.filter_bag()
if __name__ == "__main__":
main()
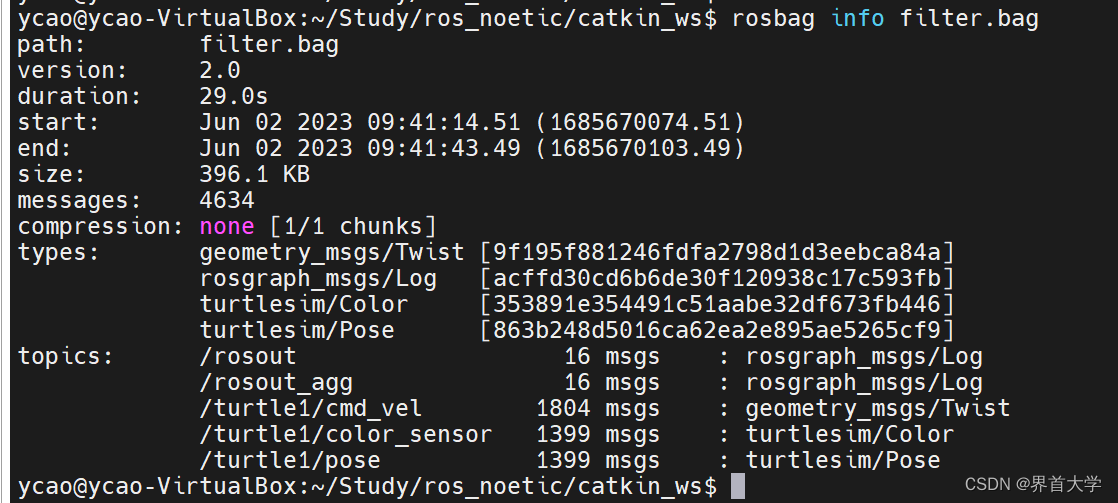
(2)编译并运行
cd ~/catkin_ws/
catkin_make --source src/python/rosbag_test/
source devel/setup.bash
./devel/lib/rosbag_test/bag_filter.py -i ../bag_dir/square_1.bag -o filter.bag -s 1 -e 1

2.4 python 包播放样例
(1)创建并编写bag_play.py
cd ~/catkin_ws/src/python/rosbag_test
touch scripts/bag_play.py
bag_play.py
#! /usr/bin/env python3
import os, sys
import rospy
import rosbag
import argparse
class BagPlay(object):
def __init__(self, bag, start_offset, rate, topic_list=[]):
self.__bag = bag
self.__start_ofset = start_offset
self.__rate = rate
self.__topic_list = topic_list
self.__publisher = {
}
// 必须持久化publisher
def create_publisher(self):
bag = rosbag.Bag(self.__bag, 'r')
for topic, msg, t in bag.read_messages(topics=self.__topic_list, raw=False):
if topic not in self.__publisher:
self.__publisher[topic] = rospy.Publisher(topic, type(msg), queue_size=10)
bag.close()
def start_play(self):
bag = rosbag.Bag(self.__bag, "r")
bag_start_time = bag.get_start_time() + self.__start_ofset
rospy_start_time =rospy.get_time()
for topic, msg, t in bag.read_messages(topics=self.__topic_list, start_time=rospy.Time.from_sec(bag_start_time)):
// 这里实现了倍速播放的机制,比c++版逻辑更清晰简介 !!
relative_time = (t.to_sec() - bag_start_time) / self.__rate
while rospy.get_time() < (rospy_start_time + relative_time):
rospy.sleep(0.01)
self.__publisher[topic].publish(msg)
// 这里是进度显示功能
cur = t.to_sec()
du = rospy.Duration(cur - bag_start_time).to_sec()
sys.stdout.write("[RUNNING] Bag Time: %f Duration: %f\r" %(cur, du))
sys.stdout.flush()
if rospy.is_shutdown():
break
print("\n")
bag.close
def main():
// 支持偏移起点播放,支持倍速播放,支持播放指定topic
parser = argparse.ArgumentParser(description="play topic from rosbag")
parser.add_argument("-b", "--bag", type=str, required=True, help="specify rosbag")
parser.add_argument("-s", "--start_offset", type=int, default=0, help="offset time from bag start")
parser.add_argument("-r", "--rate", type=float, default=1.0, help="specify play rate")
parser.add_argument("-t", "--topic_list", nargs="+", type=str, help="specify play topics")
parser.add_argument("extra_args", nargs='*', help=argparse.SUPPRESS)
args = parser.parse_args()
if not os.path.isfile(args.bag):
print("%s is not found!" %args.bag)
return
rospy.init_node("bag_player")
player = BagPlay(args.bag, args.start_offset, args.rate, args.topic_list)
player.create_publisher()
print("start play bag after 2 sec...")
rospy.sleep(2.0)
player.start_play()
if __name__ == "__main__":
main()
(2)创建并编写start_play.launch
cd ~/catkin_ws/src/python/rosbag_test
touch launch/start_play.launch
start_play.launch
<launch>
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
required="true"
/>
<node
pkg="rosbag_test"
type="bag_play.py"
name="bag_player"
args="-b /home/ycao/Study/ros_noetic/bag_dir/square_1.bag -t /turtle1/cmd_vel"
output="screen"
/>
</launch>
(3)这里给出覆盖四个样例的CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(rosbag_test)
find_package(catkin REQUIRED COMPONENTS
rosbag
roscpp
rospy
turtlesim
roslib
)
catkin_package()
include_directories(
${
catkin_INCLUDE_DIRS}
)
catkin_install_python(PROGRAMS
scripts/bag_echo.py
scripts/bag_filter.py
scripts/bag_record.py
scripts/bag_play.py
DESTINATION ${
CATKIN_PACKAGE_BIN_DESTINATION}
)
(4)编译并运行
cd ~/catkin_ws/
catkin_make --source src/python/rosbag_test/
source devel/setup.bash
roslaunch rosbag_test start_play.launch

3 总结
本章用python重新实现了bag录制,读取,截断和回放四个样例,相比于c++版,代码明显更短,实现起来更容易。本文中的例子放在了本人的github上: ros_src
3.1 chatGPT4.0使用经验
写代码的过程中,大量使用了chatGPT4.0,从一开始无脑信任它,到最后不知道该不该信任它。多次受骗以后,我逐步摸索出了一套沟通方法,记录在此:
(1)对于较为复杂的代码,chatGPT给出来的往往是有bug的,而且很隐蔽,需要你调试半天,所以千万不要无脑相信它。
(2)对于编译运行出现的问题,chatGPT的回答也是模棱两可的,所以调试代码,千万不要无脑依赖chatGPT。
(3)因此,使用chatGPT,需要开发者自己要有清晰的思路,当遇到问题的时候,也要有自己的思考,用自己的思路引导它帮你。
(4)对于chatGPT给出的不准确的地方,一定要使用google及时进行校验,不要一直无脑的问它,否则肯定会浪费大量时间。